一种可控差速全向轮组
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及AGV技术领域,具体涉及一种可控差速全向轮组。
背景技术
随着工业的发展,越来越多的无人搬运车被应用到物料输送,无人搬运车以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好的优势。
如申请号为CN201922494708.8的一种AGV底盘及AGV小车,包括底盘本体;安装支架,安装支架可转动地连接于底盘本体;两个差速驱动轮,两个差速驱动轮安装于安装支架,当两个差速驱动轮以不同转速转动时,安装支架能够相对于底盘本体转动;以及多个万向轮,多个万向轮安装于底盘本体且分布在安装支架周围,它通过两个差速驱动轮实现AGV底盘的全向移动和旋转,多个万向轮与两个差速驱动轮配合,使得底盘本体保持平稳,提供多个支撑点,减小AGV底盘在旋转时和地面的滑动摩擦。
此无人搬运车无悬挂减震,运输时轮组容易悬空,其对地面平整度适应能力弱。
发明内容
本发明的目的在于提供一种可控差速全向轮组,以解决现有技术中无人搬运车无悬挂减震,对地面平整度适应能力弱的技术问题。本发明提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
为实现上述目的,本发明提供了以下技术方案:
一种可控差速全向轮组,包括轮架、差速轮组件、导向杆、作动筒、集成在作动筒上的传感器组件和转盘轴承,所述轮架两端均连接有差速轮组件;所述导向杆和作动筒集成在轮架的中心位置;
所述差速轮组件包括差速轮、电机减速器和独立的链传动系统,所述差速轮连接在轮架上,所述电机减速器固定在轮架上,电机减速器通过链传动系统与差速轮连接。
所述传感器组件包括位移传感器、压力传感器以及角度传感器。
可选的或优选的,所述链传动系统包括固定在电机减速器上的主动链轮、连接在差速轮上的从动链轮,主动链轮和从动链轮外绕有链条。
可选的或优选的,所述轮架上设有连接轴,所述连接轴的两端通过轴承连接两个从动链轮。
可选的或优选的,所述从动链轮通过螺钉连接有齿轮,所述齿轮与差速轮连接。
可选的或优选的,所述从动链轮设有用于安装轴承的孔,所述从动链轮上还设有用于连接齿轮的螺纹孔。
可选的或优选的,所述差速轮内设有用于连接齿轮的齿。
本发明至少可以产生如下技术效果:
本发明利用差速轮组件实现转向,转向角度的精度通过角度传感器的信号反馈来控制;通过作动筒的悬挂摆动、位移传感器和压力传感器的信号反馈来实现对路面不平整的自适应。
附图说明
图1是本发明实施例的结构示意图;
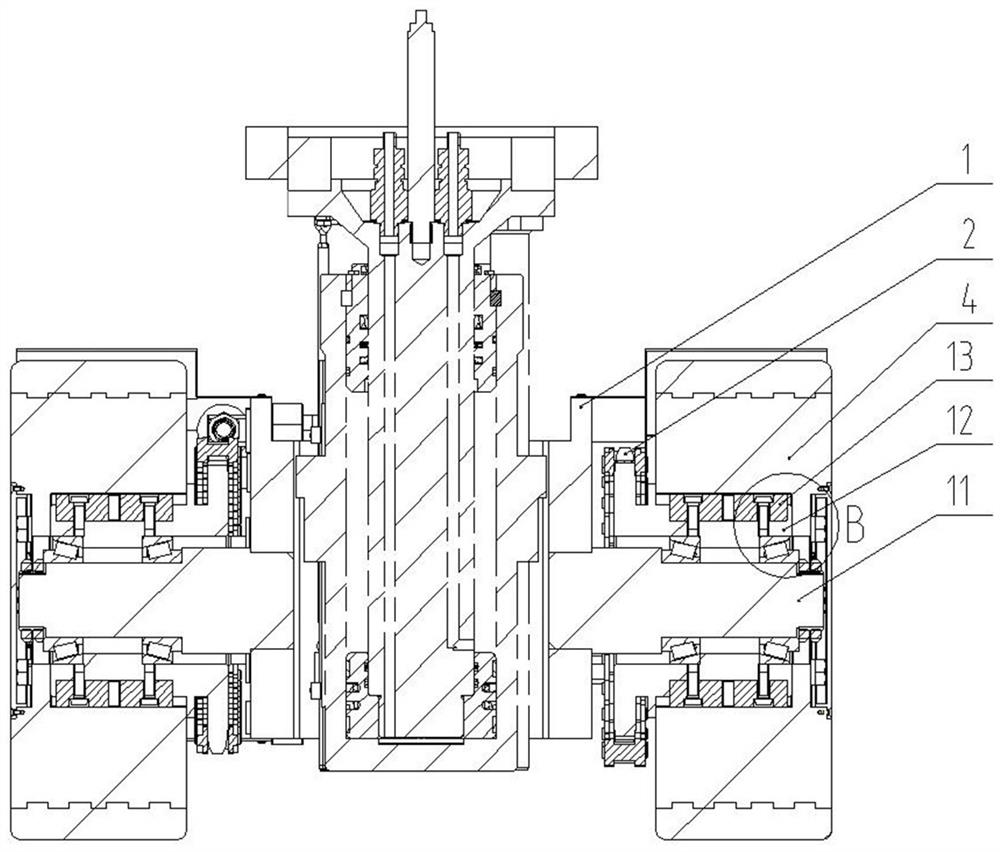
图2是图1中A-A的剖视图;
图3是图2中B处的局部放大图;
图4是图1的俯视图;
图5是本发明的外部结构示意图。
图中:1-轮架;2-链传动系统;3-电机减速器;4-差速轮;5-作动筒;6-位移传感器;7-压力传感器;8-角度传感器;9-转盘轴承;10-导向杆;11-连接轴;12-从动链轮;13-齿轮。
具体实施方式
如图1-5所示,一种可控差速全向轮组,包括轮架1、差速轮组件、导向杆10、可摆动悬挂的作动筒5、集成在作动筒5上的传感器组件和转盘轴承9;所述轮架1两端均连接有差速轮组件;所述导向杆10和作动筒5集成在轮架1的中心位置;
所述差速轮组件包括差速轮4、电机减速器3和独立的链传动系统2;所述差速轮4连接在轮架1上;所述电机减速器3固定在轮架1上;电机减速器3通过链传动系统2与差速轮4连接,通过两组差速轮组件产生速度差,形成轮组转向;
所述传感器组件包括位移传感器6、压力传感器7以及角度传感器8,通过位移传感器6和压力传感器7的信号反馈来控制轮组的自适应收缩,实现对路面纵向不平整的调整。
作为可选的实施方式,所述链传动系统2包括固定在电机减速器3上的主动链轮、连接在差速轮4上的从动链轮12;主动链轮和从动链轮12外绕有链条;通过电机减速器3驱动主动链轮转动,主动链轮通过链条带动从动链轮12转动。
作为可选的实施方式,所述轮架1上设有连接轴11;所述连接轴11的两端通过轴承连接两个从动链轮12;轴承支承从动链轮12,从动链轮12绕连接轴11的轴线转动。
作为可选的实施方式,所述从动链轮12通过螺钉连接有齿轮13;所述齿轮13与差速轮4连接,实现从动链轮12和差速轮4的连接,保证差速轮4随从动链轮12转动。
作为可选的实施方式,所述从动链轮12上还设有用于连接齿轮13的螺纹孔。
作为可选的实施方式,所述差速轮4内设有用于连接齿轮13的齿,保证齿轮13能带动差速轮4转动。
作为可选的实施方式,可导向杆10可以在重载情况下伸缩,便于主动悬挂,且可满足大型重载物品的运输。
本发明可通过两组差速轮组件的速度差形成轮组转向,通过角度传感器8的信号反馈来控制转向角度的精度;行走过程中通过作动筒5做悬挂摆动来实现对横向面不平整的自适应;通过位移传感器6和压力传感器7的信号反馈来控制轮组的自适应收缩,实现对路面纵向不平整的调整。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。
- 一种可控差速全向轮组
- 一种全向轮、全向轮组及使用该全向轮或全向轮组的载物小车