无人驾驶车辆的控制方法及装置
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及车辆控制技术领域,具体而言,涉及一种无人驾驶车辆的控制方法及装置。
背景技术
相关技术中,在进行车辆控制时,一般是通过驾驶人员对当前道路状态进行观测得到判断结果,并基于判断结果来确定车辆驾驶方式,例如,调整方向、调整速度等,这样完全依赖于驾驶人员的主观判断,会存在安全隐患。另外,即使当前一些车辆上也会设置智能辅助驾驶系统,但是,智能辅助驾驶系统也仅仅是做出驾驶决策,并不会实时根据车辆所在道路的路况信息来确定车辆是否行驶在安全区域,这样同样车辆的行驶同样会到道路安全构成安全隐患。
针对上述相关技术中车辆控制不够智能,无法对车辆是否行驶在安全区域进行精准判断,可靠性较低的问题,目前尚未提出有效的解决方案。
发明内容
本发明实施例提供了一种无人驾驶车辆的控制方法及装置,以至少解决相关技术中车辆控制不够智能,无法对车辆是否行驶在安全区域进行精准判断,可靠性较低的技术问题。
根据本发明实施例的一个方面,提供了一种无人驾驶车辆的控制方法,包括:确定目标车辆在当前道路的可行驶区域数据;基于所述可行驶区域数据以及所述目标车辆的雷达数据判断所述目标车辆是否行驶在所述可行驶区域数据对应的可行驶区域,得到判断结果;在所述判断结果表示所述目标车辆未行驶在所述可行驶区域时,获取所述目标车辆的当前位置数据与所述可行驶区域数据的偏移量;基于所述偏移量对所述目标车辆的驾驶策略进行调整,并利用调整后的驾驶策略控制所述目标车辆行驶在所述可行驶区域。
可选地,基于目标车辆的车身宽度确定所述目标车辆在当前道路的可行驶区域数据,包括:获取所述目标车辆的车身宽度;获取所述当前道路的道路状态数据以及道路属性信息;基于所述车身宽度、所述道路状态数据以及所述道路属性信息确定所述可行驶区域;对所述可行驶区域进行分析,以得到所述可行驶区域数据。
可选地,基于所述可行驶区域数据以及所述目标车辆的雷达数据判断所述目标车辆是否行驶在所述可行驶区域数据对应的可行驶区域,包括:将所述可行驶区域数据以及所述雷达数据输入至车辆监控模型,其中,所述车辆监控模型为使用多组训练数据通过机器学习训练得到的,所述多组训练数据中的每一组训练数据均包括:车辆的可行驶区域数据以及车辆的雷达数据、在所述车辆的可行驶区域数据以及所述车辆的雷达数据下的输出结果;获取所述车辆监控模型的输出结果,并基于所述输出结果确定所述目标车辆是否行驶在所述可行驶区域。
可选地,获取所述目标车辆的当前位置数据与所述可行驶区域数据的偏移量,包括:将所述当前位置数据对应的第一坐标数据与所述可行驶区域数据对应的第二坐标数据进行坐标转换,以将所述第一坐标数据与所述第二坐标数据转换到同一坐标系中;在所述同一坐标系中基于坐标转换后的第一坐标数据和第二坐标数据确定所述偏移量。
可选地,基于所述偏移量对所述目标车辆的驾驶策略进行调整,包括:通过驾驶决策模型,确定与所述偏移量对应的驾驶策略调整方式,其中,所述驾驶决策模型为使用多组训练数据通过机器学习训练得到的,所述多组训练数据中的每一组训练数据均包括:偏移量以及所述偏移量对应的驾驶策略调整方式;利用所述驾驶策略调整方式对所述驾驶策略进行调整。
根据本发明实施例的另外一个方面,还提供了一种无人驾驶车辆的控制方法,包括:在位于当前道路上的目标车辆行驶过程中,在所述目标车辆的操作面板上显示所述目标车辆在当前道路的可行驶区域数据;在所述操作面板上显示基于所述可行驶区域数据以及所述目标车辆的雷达数据判断得到的所述目标车辆是否行驶在所述可行驶区域数据对应的可行驶区域;在所述目标车辆未行驶于所述可行驶区域时,在所述操作面板上显示所述目标车辆的当前位置数据与所述可行驶区域数据的偏移量;在所述操作面板上显示基于所述偏移量调整后的驾驶策略,以及所述目标车辆按照调整后的驾驶策略的行驶路线。
根据本发明实施例的另外一个方面,还提供了一种无人驾驶车辆的控制装置,包括:确定单元,用于确定目标车辆在当前道路的可行驶区域数据;判断单元,用于基于所述可行驶区域数据以及所述目标车辆的雷达数据判断所述目标车辆是否行驶在所述可行驶区域数据对应的可行驶区域,得到判断结果;获取单元,用于在所述判断结果表示所述目标车辆未行驶在所述可行驶区域时,获取所述目标车辆的当前位置数据与所述可行驶区域数据的偏移量;控制单元,用于基于所述偏移量对所述目标车辆的驾驶策略进行调整,并利用调整后的驾驶策略控制所述目标车辆行驶在所述可行驶区域。
可选地,所述确定单元,包括:第一获取模块,用于获取所述目标车辆的车身宽度;第二获取模块,用于获取所述当前道路的道路状态数据以及道路属性信息;第一确定模块,用于基于所述车身宽度、所述道路状态数据以及所述道路属性信息确定所述可行驶区域;获取模块,用于对所述可行驶区域进行分析,以得到所述可行驶区域数据。
可选地,所述判断单元,包括:输入模块,用于将所述可行驶区域数据以及所述雷达数据输入至车辆监控模型,其中,所述车辆监控模型为使用多组训练数据通过机器学习训练得到的,所述多组训练数据中的每一组训练数据均包括:车辆的可行驶区域数据以及车辆的雷达数据、在所述车辆的可行驶区域数据以及所述车辆的雷达数据下的输出结果;判断模块,用于获取所述车辆监控模型的输出结果,并基于所述输出结果确定所述目标车辆是否行驶在所述可行驶区域。
可选地,所述获取单元,包括:转换模块,用于将所述当前位置数据对应的第一坐标数据与所述可行驶区域数据对应的第二坐标数据进行坐标转换,以将所述第一坐标数据与所述第二坐标数据转换到同一坐标系中;第二确定模块,用于在所述同一坐标系中基于坐标转换后的第一坐标数据和第二坐标数据确定所述偏移量。
可选地,所述控制单元,包括:第三确定模块,用于通过驾驶决策模型,确定与所述偏移量对应的驾驶策略调整方式,其中,所述驾驶决策模型为使用多组训练数据通过机器学习训练得到的,所述多组训练数据中的每一组训练数据均包括:偏移量以及所述偏移量对应的驾驶策略调整方式;调整模块,用于利用所述驾驶策略调整方式对所述驾驶策略进行调整。
根据本发明实施例的另外一个方面,还提供了一种无人驾驶车辆的控制装置,包括:第一显示单元,用于在位于当前道路上的目标车辆行驶过程中,在所述目标车辆的操作面板上显示所述目标车辆在当前道路的可行驶区域数据;第二显示单元,用于在所述操作面板上显示基于所述可行驶区域数据以及所述目标车辆的雷达数据判断得到的所述目标车辆是否行驶在所述可行驶区域数据对应的可行驶区域;第三显示单元,用于在所述目标车辆未行驶于所述可行驶区域时,在所述操作面板上显示所述目标车辆的当前位置数据与所述可行驶区域数据的偏移量;第四显示单元,用于在所述操作面板上显示基于所述偏移量调整后的驾驶策略,以及所述目标车辆按照调整后的驾驶策略的行驶路线。
根据本发明实施例的另外一个方面,还提供了一种无人驾驶车辆,使用上述中任一项所述的无人驾驶车辆的控制方法。
根据本发明实施例的另外一个方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序被处理器运行时控制所述计算机可读存储介质所在设备执行上述中任一项所述的无人驾驶车辆的控制方法。
根据本发明实施例的另外一个方面,还提供了一种处理器,所述处理器用于运行计算机程序,其中,所述计算机程序运行时执行上述中任一项所述的无人驾驶车辆的控制方法。
在本发明实施例中,确定目标车辆在当前道路的可行驶区域数据;基于可行驶区域数据以及目标车辆的雷达数据判断目标车辆是否行驶在可行驶区域数据对应的可行驶区域,得到判断结果;在判断结果表示目标车辆未行驶在可行驶区域时,获取目标车辆的当前位置数据与可行驶区域数据的偏移量;基于偏移量对目标车辆的驾驶策略进行调整,并利用调整后的驾驶策略控制目标车辆行驶在可行驶区域。通过本发明实施例的提供的无人驾驶车辆的控制方法,实现了可以获取目标车辆的车身数据、道路属性信息以及道路状态信息等确定目标车辆的可行驶区域数据,并基于目标车辆当前位置数据与可行驶区域数据之间的偏差量对驾驶策略进行调整的目的,提高了车辆控制的可靠性,降低了安全隐患,进而解决了相关技术中车辆控制不够智能,无法对车辆是否行驶在安全区域进行精准判断,可靠性较低的技术问题。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1是根据本发明实施例的无人驾驶车辆的控制方法的流程图;
图2是根据本发明实施例的可选的无人驾驶车辆的控制方法的流程图;
图3是根据本发明实施例的无人驾驶车辆的控制装置的示意图;
图4是根据本发明实施例的可选的无人驾驶车辆的控制装置的示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
实施例1
根据本发明实施例,提供了一种无人驾驶车辆的控制方法的方法实施例,需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
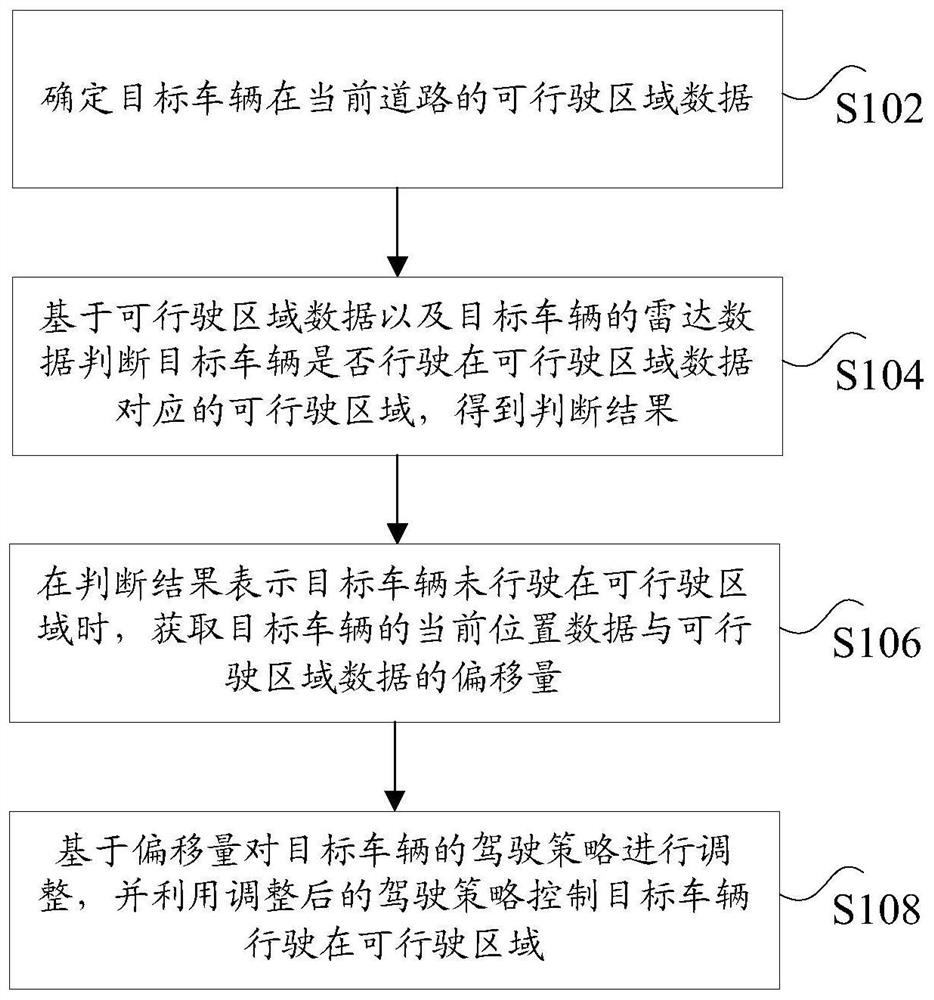
图1是根据本发明实施例的无人驾驶车辆的控制方法的流程图,如图1所示,该方法包括如下步骤:
步骤S102,确定目标车辆在当前道路的可行驶区域数据。
可选的,上述可行驶区域为目标车辆在当前道路的可行驶区域对应的数据,例如,该可行驶区域的形状、大小等。
作为一种可选的实施例,基于目标车辆的车身宽度确定目标车辆在当前道路的可行驶区域数据,可以包括:获取目标车辆的车身宽度;获取当前道路的道路状态数据以及道路属性信息;基于车身宽度、道路状态数据以及道路属性信息确定可行驶区域;对可行驶区域进行分析,以得到可行驶区域数据。
例如,此处可以从目标车辆的处理器中调取该目标车辆的特征信息,从而从该特征信息中调取目标车辆的车身宽度;接着可以获取目标车辆上设置的各种传感器、雷达等采集的数据来确定目标车辆所在道路的道路属性信息(例如,道路宽度、道路弯曲度等)、道路状态信息(例如,道路的拥挤状态),从而可以基于目标车辆的车身宽度、道路状态数据以及道路属性信息等区域可行驶区域,从而对可行驶区域进行分析,以得到可行驶区域数据。
步骤S104,基于可行驶区域数据以及目标车辆的雷达数据判断目标车辆是否行驶在可行驶区域数据对应的可行驶区域,得到判断结果。
步骤S106,在判断结果表示目标车辆未行驶在可行驶区域时,获取目标车辆的当前位置数据与可行驶区域数据的偏移量。
步骤S108,基于偏移量对目标车辆的驾驶策略进行调整,并利用调整后的驾驶策略控制目标车辆行驶在可行驶区域。
由上可知,在本发明实施例中,可以确定目标车辆在当前道路的可行驶区域数据,基于可行驶区域数据以及目标车辆的雷达数据判断目标车辆是否行驶在可行驶区域数据对应的可行驶区域,得到判断结果,在判断结果表示目标车辆未行驶在可行驶区域时,获取目标车辆的当前位置数据与可行驶区域数据的偏移量,基于偏移量对目标车辆的驾驶策略进行调整,并利用调整后的驾驶策略控制目标车辆行驶在可行驶区域,实现了可以获取目标车辆的车身数据、道路属性信息以及道路状态信息等确定目标车辆的可行驶区域数据,并基于目标车辆当前位置数据与可行驶区域数据之间的偏差量对驾驶策略进行调整的目的,提高了车辆控制的可靠性,降低了安全隐患。
因此,通过本发明实施例的提供的无人驾驶车辆的控制方法,解决了相关技术中车辆控制不够智能,无法对车辆是否行驶在安全区域进行精准判断,可靠性较低的技术问题。
作为一种可选的实施例,基于可行驶区域数据以及目标车辆的雷达数据判断目标车辆是否行驶在可行驶区域数据对应的可行驶区域,可以包括:将可行驶区域数据以及雷达数据输入至车辆监控模型,其中,车辆监控模型为使用多组训练数据通过机器学习训练得到的,多组训练数据中的每一组训练数据均包括:车辆的可行驶区域数据以及车辆的雷达数据、在车辆的可行驶区域数据以及车辆的雷达数据下的输出结果;获取车辆监控模型的输出结果,并基于输出结果确定目标车辆是否行驶在可行驶区域。
在本发明实施例中,可以通过预先训练得到一个车辆监控模型,从而可以利用车辆监控模型对输入的可行驶区域数据以及采集的雷达数据进行处理,并输出结果,从而可以根据输出结果来确定车辆当前是否行驶于可行驶区域中。
其中,上述雷达数据是为对目标车辆上的雷达采集的雷达信号进行处理得到数据,例如,目标点迹。
作为一种可选的实施例,获取目标车辆的当前位置数据与可行驶区域数据的偏移量,可以包括:将当前位置数据对应的第一坐标数据与可行驶区域数据对应的第二坐标数据进行坐标转换,以将第一坐标数据与第二坐标数据转换到同一坐标系中;在同一坐标系中基于坐标转换后的第一坐标数据和第二坐标数据确定偏移量。
即,在本发明实施例中,可以获取目标车辆的当前位置数据对应的第一坐标数据,同时获取可行驶区域对应的第二坐标数据,接着将第一坐标数据以及第二坐标数据转换到同一坐标系中,以便于后续确定目标车辆的当前位置与可行驶区域的偏移量。
作为一种可选的实施例,基于偏移量对目标车辆的驾驶策略进行调整,可以包括:通过驾驶决策模型,确定与偏移量对应的驾驶策略调整方式,其中,驾驶决策模型为使用多组训练数据通过机器学习训练得到的,多组训练数据中的每一组训练数据均包括:偏移量以及偏移量对应的驾驶策略调整方式;利用驾驶策略调整方式对驾驶策略进行调整。
在本发明实施例中,可以通过驾驶决策模型来确定与偏移量对应的驾驶策略调整方式,从而基于该驾驶策略调整方式对目标车辆的当前驾驶策略进行调整,以控制目标车辆按照调整后的驾驶策略对应的驾驶方式行驶,提高了目标车辆的可靠性。
实施例2
根据本发明实施例,还提供了一种无人驾驶车辆的控制方法的方法实施例,需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
图2是根据本发明实施例的可选的无人驾驶车辆的控制方法的流程图,如图2所示,该方法包括如下步骤:
步骤S202,在位于当前道路上的目标车辆行驶过程中,在目标车辆的操作面板上显示目标车辆在当前道路的可行驶区域数据。
步骤S204,在操作面板上显示基于可行驶区域数据以及目标车辆的雷达数据判断得到的目标车辆是否行驶在可行驶区域数据对应的可行驶区域。
步骤S206,在目标车辆未行驶于可行驶区域时,在操作面板上显示目标车辆的当前位置数据与可行驶区域数据的偏移量。
步骤S208,在操作面板上显示基于偏移量调整后的驾驶策略,以及目标车辆按照调整后的驾驶策略的行驶路线。
由上可知,在本发明实施例中,可以在位于当前道路上的目标车辆行驶过程中,在目标车辆的操作面板上显示目标车辆在当前道路的可行驶区域数据;在操作面板上显示基于可行驶区域数据以及目标车辆的雷达数据判断得到的目标车辆是否行驶在可行驶区域数据对应的可行驶区域;在目标车辆未行驶于可行驶区域时,在操作面板上显示目标车辆的当前位置数据与可行驶区域数据的偏移量;在操作面板上显示基于偏移量调整后的驾驶策略,以及目标车辆按照调整后的驾驶策略的行驶路线,实现了可以获取目标车辆的车身数据、道路属性信息以及道路状态信息等确定目标车辆的可行驶区域数据,并基于目标车辆当前位置数据与可行驶区域数据之间的偏差量对驾驶策略进行调整的目的,提高了车辆控制的可靠性,降低了安全隐患。
因此,通过本发明实施例的提供的无人驾驶车辆的控制方法,解决了相关技术中车辆控制不够智能,无法对车辆是否行驶在安全区域进行精准判断,可靠性较低的技术问题。
实施例3
根据本发明实施例的另外一个方面,还提供了一种无人驾驶车辆的控制装置,图3是根据本发明实施例的无人驾驶车辆的控制装置的示意图,如图3所示,该无人驾驶车辆的控制装置可以包括:确定单元31、判断单元33、获取单元35以及控制单元37。下面对该无人驾驶车辆的控制装置进行说明。
确定单元31,用于确定目标车辆在当前道路的可行驶区域数据。
判断单元33,用于基于可行驶区域数据以及目标车辆的雷达数据判断目标车辆是否行驶在可行驶区域数据对应的可行驶区域,得到判断结果。
获取单元35,用于在判断结果表示目标车辆未行驶在可行驶区域时,获取目标车辆的当前位置数据与可行驶区域数据的偏移量。
控制单元37,用于基于偏移量对目标车辆的驾驶策略进行调整,并利用调整后的驾驶策略控制目标车辆行驶在可行驶区域。
此处需要说明的是,上述确定单元31、判断单元33、获取单元35以及控制单元37对应于实施例1中的步骤S102至S108,上述模块与对应的步骤所实现的示例和应用场景相同,但不限于上述实施例1所公开的内容。需要说明的是,上述模块作为装置的一部分可以在诸如一组计算机可执行指令的计算机系统中执行。
由上可知,在本发明实施例中,可以确定单元确定目标车辆在当前道路的可行驶区域数据;然后利用判断单元基于可行驶区域数据以及目标车辆的雷达数据判断目标车辆是否行驶在可行驶区域数据对应的可行驶区域,得到判断结果;接着利用获取单元在判断结果表示目标车辆未行驶在可行驶区域时,获取目标车辆的当前位置数据与可行驶区域数据的偏移量;以及利用控制单元基于偏移量对目标车辆的驾驶策略进行调整,并利用调整后的驾驶策略控制目标车辆行驶在可行驶区域。通过本发明实施例的提供的无人驾驶车辆的控制装置,实现了可以获取目标车辆的车身数据、道路属性信息以及道路状态信息等确定目标车辆的可行驶区域数据,并基于目标车辆当前位置数据与可行驶区域数据之间的偏差量对驾驶策略进行调整的目的,提高了车辆控制的可靠性,降低了安全隐患,解决了相关技术中车辆控制不够智能,无法对车辆是否行驶在安全区域进行精准判断,可靠性较低的技术问题。
可选地,确定单元,包括:第一获取模块,用于获取目标车辆的车身宽度;第二获取模块,用于获取当前道路的道路状态数据以及道路属性信息;第一确定模块,用于基于车身宽度、道路状态数据以及道路属性信息确定可行驶区域;获取模块,用于对可行驶区域进行分析,以得到可行驶区域数据。
可选地,判断单元,包括:输入模块,用于将可行驶区域数据以及雷达数据输入至车辆监控模型,其中,车辆监控模型为使用多组训练数据通过机器学习训练得到的,多组训练数据中的每一组训练数据均包括:车辆的可行驶区域数据以及车辆的雷达数据、在车辆的可行驶区域数据以及车辆的雷达数据下的输出结果;判断模块,用于获取车辆监控模型的输出结果,并基于输出结果确定目标车辆是否行驶在可行驶区域。
可选地,获取单元,包括:转换模块,用于将当前位置数据对应的第一坐标数据与可行驶区域数据对应的第二坐标数据进行坐标转换,以将第一坐标数据与第二坐标数据转换到同一坐标系中;第二确定模块,用于在同一坐标系中基于坐标转换后的第一坐标数据和第二坐标数据确定偏移量。
可选地,控制单元,包括:第三确定模块,用于通过驾驶决策模型,确定与偏移量对应的驾驶策略调整方式,其中,驾驶决策模型为使用多组训练数据通过机器学习训练得到的,多组训练数据中的每一组训练数据均包括:偏移量以及偏移量对应的驾驶策略调整方式;调整模块,用于利用驾驶策略调整方式对驾驶策略进行调整。
实施例4
根据本发明实施例的另外一个方面,还提供了一种无人驾驶车辆的控制装置,图4是根据本发明实施例的可选的无人驾驶车辆的控制装置的示意图,如图4所示,该无人驾驶车辆的控制装置可以包括:第一显示单元41、第二显示单元43、第三显示单元45以及第四显示单元47。下面对该无人驾驶车辆的控制装置进行说明。
第一显示单元41,用于在位于当前道路上的目标车辆行驶过程中,在目标车辆的操作面板上显示目标车辆在当前道路的可行驶区域数据。
第二显示单元43,用于在操作面板上显示基于可行驶区域数据以及目标车辆的雷达数据判断得到的目标车辆是否行驶在可行驶区域数据对应的可行驶区域。
第三显示单元45,用于在目标车辆未行驶于可行驶区域时,在操作面板上显示目标车辆的当前位置数据与可行驶区域数据的偏移量。
第四显示单元47,用于在操作面板上显示基于偏移量调整后的驾驶策略,以及目标车辆按照调整后的驾驶策略的行驶路线。
此处需要说明的是,上述第一显示单元41、第二显示单元43、第三显示单元45以及第四显示单元47对应于实施例2中的步骤S202至S208,上述模块与对应的步骤所实现的示例和应用场景相同,但不限于上述实施例2所公开的内容。需要说明的是,上述模块作为装置的一部分可以在诸如一组计算机可执行指令的计算机系统中执行。
由上可知,在本发明实施例中,可以第一显示单元在位于当前道路上的目标车辆行驶过程中,在目标车辆的操作面板上显示目标车辆在当前道路的可行驶区域数据;然后利用第二显示单元在操作面板上显示基于可行驶区域数据以及目标车辆的雷达数据判断得到的目标车辆是否行驶在可行驶区域数据对应的可行驶区域;接着利用第三显示单元在目标车辆未行驶于可行驶区域时,在操作面板上显示目标车辆的当前位置数据与可行驶区域数据的偏移量;并利用第四显示单元在操作面板上显示基于偏移量调整后的驾驶策略,以及目标车辆按照调整后的驾驶策略的行驶路线。通过本发明实施例的提供的无人驾驶车辆的控制装置,实现了可以获取目标车辆的车身数据、道路属性信息以及道路状态信息等确定目标车辆的可行驶区域数据,并基于目标车辆当前位置数据与可行驶区域数据之间的偏差量对驾驶策略进行调整的目的,提高了车辆控制的可靠性,降低了安全隐患,解决了相关技术中车辆控制不够智能,无法对车辆是否行驶在安全区域进行精准判断,可靠性较低的技术问题。
实施例5
根据本发明实施例的另外一个方面,还提供了一种无人驾驶车辆,使用上述中任一项的无人驾驶车辆的控制方法。
实施例6
根据本发明实施例的另外一个方面,还提供了一种计算机可读存储介质,计算机可读存储介质包括存储的计算机程序,其中,在计算机程序被处理器运行时控制计算机可读存储介质所在设备执行上述中任一项的无人驾驶车辆的控制方法。
实施例7
根据本发明实施例的另外一个方面,还提供了一种处理器,处理器用于运行计算机程序,其中,计算机程序运行时执行上述中任一项的无人驾驶车辆的控制方法。
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
在本发明的上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
在本申请所提供的几个实施例中,应该理解到,所揭露的技术内容,可通过其它的方式实现。其中,以上所描述的装置实施例仅仅是示意性的,例如所述单元的划分,可以为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,单元或模块的间接耦合或通信连接,可以是电性或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可为个人计算机、服务器或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、只读存储器(ROM,Read-Only Memory)、随机存取存储器(RAM,Random Access Memory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码的介质。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 无人驾驶车辆的控制方法及控制装置、无人驾驶车辆
- 无人驾驶车辆的控制方法及控制装置、无人驾驶车辆