一种机器人车架结构
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及机器人结构的技术领域,具体为一种机器人车架结构。
背景技术
根据应用领域的不同,目前智能机器人可分为工业机器人、行业应用服务机器人及个人/家用机器人三类,现有的服务型机器人在解决载人载物的承重需求时、又需要具备成本低廉结构轻巧。
现有的服务机器人多偏向无载人自主行走结构,按外形来分载人载体的服务型机器人具备车形形态,现有侧车行形态的机器人车架普遍通过钢焊接成型,其重量较大,且在实际使用时,仅为单层布置、其刚度和减震度相对较差,为此,急需要为服务型的车型机器人提供一种结构稳固、重量轻的车架机构。
发明内容
针对上述问题,本发明提供了一种机器人车架结构,其使得整体结构稳固、重量轻,且确保了组装快捷方便、整体刚度好、减震性好。
一种机器人车架结构,其特征在于,其包括:
前部框架,其为若干铝合金型材拼接形成的双层梁结构,其包括第一上层框架、第一下层框架;
后部框架,其为若干铝合金型材拼接形成的双层梁结构,其包括第二上层框架、第二下层框架;
所述前部框架的后部平行布置的后部立柱上凸于第一上层框架,所述后部纵梁的后端面固接所述第二上层框架、第二下层框架的对应位置的横梁、纵梁;
所述第二下层框架高于第一下层框架布置;
所述前部框架的前端面中心位置前凸形成前桥安装框架,所述前桥安装框架为由若干铝合金型材拼接形成的双层梁结构;
所述前部框架、后部框架、前桥安装框架的每层框架所对应的横梁和纵梁之间均通过铸件角码固接连接,所述前部框架和后部框架之间通过铸件角码连接,所述前部框架和前桥安装框架之间通过铸件角码连接。
其进一步特征在于:
前部框架的前部立柱、后部立柱对应于纵梁的位置分别通过T形板加强连接,所述第一下层框架的宽度方向中部区域排列有两根纵梁,所述纵梁对应于前桥安装框架的两侧部纵梁的位置布置,所述后部框架的第二上层框架的宽度方向排列有两根连接纵梁,所述连接纵梁对应于中间区域的后部立柱的位置布置,所述T型板覆盖于对应的纵梁和横梁所遮罩的区域连接布置;
所述前部框架的第一上层框架的侧纵梁和对应的后部立柱的连接处设置有斜支撑梁,所述斜支承梁确保了连接的稳固可靠;
所述前部框架的第一下层框的侧纵梁和后部横梁的连接处设置有底板下加强梁,确保后方后部框架的连接的稳定可靠;
所述前桥安装框架的第二后部立柱即为所述前部框架的前端面的中心区域的两根前部立柱,所述前桥安装框架包括第三上层框架、第三下层框架;
所述第三上层框架、第三下层框架分别设置有两根纵梁,每根纵梁的对应于轮子摆臂的位置分别设置有对应的摆臂连接件,所述第三上层框架的两根纵梁之间的摆臂连接件之间通过横向支撑梁连接;
所述第三下层框架的两根纵梁之间的区域还固设有转向机固定支架,便于连接转向机构;
所述第二下层框架的底部对应于所述前部框的中部区域的后部立柱的位置通过斜加强板固接支承,所述斜加强板的支承面用于固接第一下层框架的前横梁和对应位置的纵梁,确保后部框架的整体组装稳固可靠。
采用上述技术方案后,其车架结构的前部框架和后部框架以及前桥安装框架均通过铝合金型材及铸件角码结构配合组装,车架采用双层框架布置方式,避免焊接工艺等做车架主体带来的变形误差,实现了载人载物的承重功能需求,其提供了一种适合匹配模块化底盘件又具有较高强度的轻量化结构。
附图说明
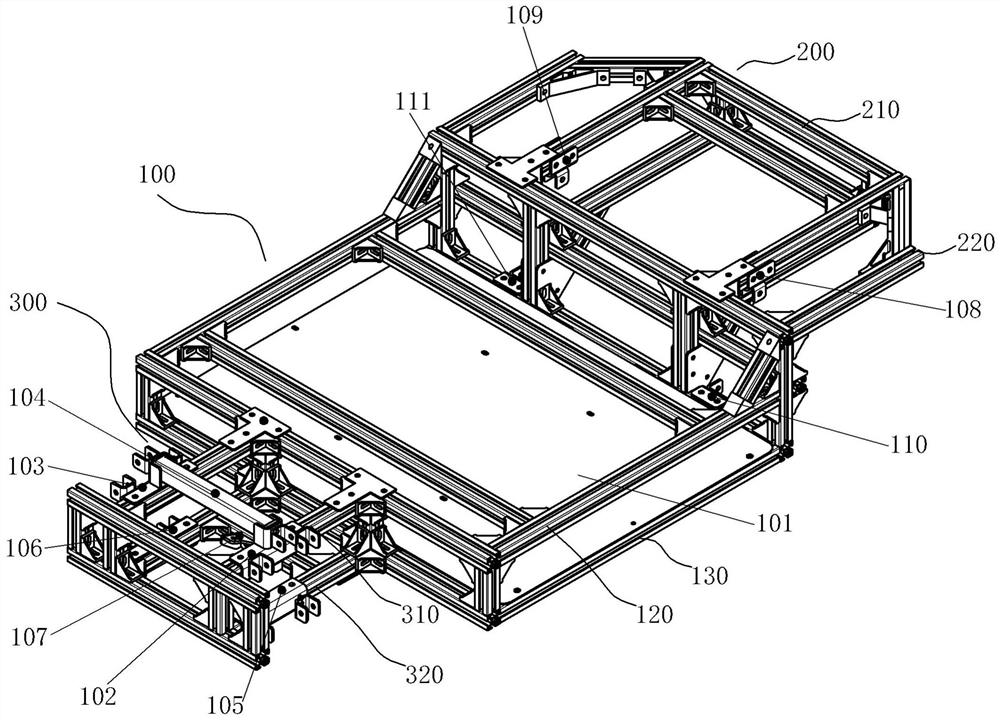
图1为本发明的立体图结构示意图一;
图2为本发明的立体图结构示意图二;
图中序号所对应的名称如下:
前部框架100、第一上层框架120、第一下层框架130
后部框架200、第二上层框架210、第二下层框架220
前桥安装框架300、第三上层框架310、第三下层框架320
电器安装板101、前轮左上摆臂连接件102、前轮右上摆臂连接件103、横向支撑梁104、前轮左下摆臂连接件105、前轮右下摆臂连接件106、转向机固定支架107、后轮减震器左连接件108、后轮减震器右连接件109、后轮摆臂左连接件110、后轮摆臂右连接件111
前杠横梁1、前杠立柱2、前上纵梁3、前下纵梁4、转向机横梁5、地板前上横梁6、地板侧下横梁7、地板前下横梁8、地板前立柱9、地板侧纵梁10、地板后立柱11、地板下加强梁12、地板上加强梁13、地板后加强梁14、地板后横梁15、行李舱侧纵梁16、行李舱中纵梁17、行李舱连接梁18、行李舱下纵梁19、行李舱后立柱20、行李舱后横梁21、行李舱加强梁22、、T形板23、135度角码24、45度角码25、90度角码26、斜加强板27、座椅安装横梁28。
具体实施方式
一种机器人车架结构,见图1和图2,其包括前部框架100、后部框架200,前部框架100用于固定安装底盘前桥及中间座椅,电池控制器,承载人的重量;后部框架200用于固定安装底盘后桥及支承物品重量。
前部框架100为若干铝合金型材拼接形成的双层梁结构,其包括第一上层框架120、第一下层框架130;
后部框架200为若干铝合金型材拼接形成的双层梁结构,其包括第二上层框架210、第二下层框架220;
前部框架100的后部平行布置的后部立柱上凸于第一上层框架120,后部纵梁的后端面固接第二上层框架210、第二下层框架220的对应位置的横梁、纵梁;
第二下层框架220高于第一下层框架130布置;
前部框架100的前端面中心位置前凸形成前桥安装框架300,前桥安装框架300为由若干铝合金型材拼接形成的双层梁结构,前桥安装框架300包括第三上层框架310、第三下层框架320。
第三上层框架310平其余第一上层框架120布置,第三下层框架320平齐于第一下层框架130布置;第二上层框架210高于第一上层框架120布置。
前部框架100、后部框架200、前桥安装框架300的每层框架所对应的横梁和纵梁之间均通过铸件角码固接连接,前部框架100和后部框架200之间通过铸件角码连接,前部框架100和前桥安装框架300之间通过铸件角码连接。
具体实施例中:
前桥安装框架300设置有前轮左上摆臂连接件102、前轮右上摆臂连接件103、横向支撑梁104、前轮左下摆臂连接件105、前轮右下摆臂连接件106、转向机固定支架107;
后部框架200上设置有后轮减震器左连接件108、后轮减震器右连接件109、后轮摆臂左连接件110、后轮摆臂右连接件111;
前部框架100的第一下层框架130的上表面固设有电器安装板101。
前桥安装框架300包括前杠、前悬架,前杠包括前杠横梁1、前杠立柱2;前悬架包括前上纵梁3、前下纵梁4、转向机横梁5;
前部框架形成底板舱体,地板舱体包括地板前上横梁6、地板侧下横梁7、地板前下横梁8、地板前立柱9、地板侧纵梁10、地板后立柱11、地板下加强梁12、地板上加强梁13、地板后加强梁14、地板后横梁15、座椅安装横梁28;
后部框架形成行李舱体,行李舱体包括行李舱侧纵梁16、行李舱中纵梁17、行李舱连接梁18、行李舱下纵梁19、行李舱后立柱20、行李舱后横梁21、行李舱加强梁22、斜加强板27;
前杠之间各梁固定安装用对称分布的90度角码26;前悬架各梁结构连接前杠和地板舱体,承载固定前轮左上摆臂连接件102、前轮右上摆臂连接件103、横向支撑梁104、前轮左下摆臂连接件105前轮右下摆臂连接件106、转向机固定支架107;
地板舱体之间各梁固定安装用对称分布的90度角码26,与前悬架连接处部位使用T形板23进行翼面加强;
行李舱体之间各梁固定安装用对称分布的135度角码24、45度角码25、90度角码26、斜加强板27,与地板舱体连接处部位使用T形板23进行翼面加强。具体实施例中,安装T形板23、135度角码24、45度角码25、90度角码26的数量为六个,且这些件关于车架长宽方向的中轴线对称。
地板下加强梁12、地板上加强梁13、地板后加强梁14、行李舱加强梁22用于加强地板舱体与行李舱体之间的连接结构,地板下加强梁12固定安装用前后分布的135度角码24、45度角码25做端头连接。
具体实施例中,前轮左上摆臂连接件102、前轮右上摆臂连接件103、横向支撑梁104、前轮左下摆臂连接件105、前轮右下摆臂连接件106、后轮减震器左连接件108、后轮减震器右连接件109、后轮摆臂左连接件110、后轮摆臂右连接件111是由4mm钢板折弯焊接而成;转向机固定支架107由4mm钢板折弯焊接而成;电器安装板101由2mm铝板激光切割而成;斜加强板27用于加强行李舱加强梁22的端头连接结构;座椅安装横梁28用于固定安装上层座椅骨架;电器安装板101用于固定安装机器人的电池、电控等电器件。
其车架结构的前部框架和后部框架以及前桥安装框架均通过铝合金型材及铸件角码结构配合组装,车架采用双层框架布置方式,避免焊接工艺等做车架主体带来的变形误差,实现了载人载物的承重功能需求,其提供了一种适合匹配模块化底盘件又具有较高强度的轻量化结构;且由于通过铝合金型材和铸件角码配以加强件进行组装,其使得组装方便、且方便车架的后续扩展作业。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种机器人车架结构
- 一种用于机器人焊接的车架安装结构装置