一种机器人的结构单元及机器人
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及机器人领域,具体涉及一种机器人的结构单元及机器人。
背景技术
仿生机器人是能够模仿生物、从事生物特点工作的机器人,例如,在西方国家,机械宠物十分流行,仿生麻雀机器人可以担任环境监测的任务,再例如,仿人机器人可以为人类提供很多便利服务,因此,仿生机器人越来越得到人们的重视,具有很好的发展前景。
为了使仿生机器人更逼真地模拟生物的特点,仿生机器人的通常设置有具有眨眼功能的眼部结构,但是目前的眨眼仅仅是为了模仿人体的眨眼动作,并没有实现对机器人眼球机构有利的效果,因此,技术人员对机器人眼球机构进行了改进,使其实现了在眨眼工作时能够对眼球部上的球面透镜进行拭擦。
发明内容
本发明要解决的技术问题是提供一种在眨眼工作时能够对眼球部上的球面透镜进行拭擦的机器人的结构单元及机器人。
为解决上述问题,本发明采用如下技术方案:
一种机器人的结构单元,包括眼球部和眼皮部,所述眼球部上设置有燕尾槽和安装孔,所述安装孔内设置有球面透镜,所述球面透镜与眼球部固定连接并形成球型设置,所述燕尾槽位于球面透镜的后方并由眼皮部盖住,所述眼皮部上设置有与燕尾槽相配对的燕尾榫,所述眼球部和眼皮部通过燕尾榫和燕尾槽滑动连接,所述眼球部和眼皮部之间设置有用于拭擦球面透镜表面并使得眼球部和眼皮部之间胀紧的海绵拭擦垫,所述海绵拭擦垫与眼皮部的背面粘合,所述海绵拭擦垫上设置有与燕尾榫相配对的第一穿孔,所述燕尾榫穿过第一穿孔设置,所述眼皮部上设置有安装架,所述安装架上设置减速电机,所述减速电机的输出轴上设置有驱动齿轮,所述眼皮部和海绵拭擦垫均设置有与驱动齿轮相配对的第二穿孔,所述驱动齿轮穿过第二穿孔并插入燕尾槽内,所述燕尾槽内设置有与驱动齿轮相配对的弧形齿条,所述弧形齿条与燕尾槽的槽底固定连接,所述弧形齿条位于燕尾榫的下方并与其形成有间隙。
作为优选,所述眼球部内设置有散热架,所述散热架上设置有摄像头模块,所述摄像头模块位于球面透镜的后方,所述燕尾槽的槽底上设置有安装孔,所述安装孔设置有一个以上,所述安装孔位于弧形齿条的侧面,所述安装孔内插入有导热粒,所述导热粒一端设置有散热片,所述散热片位于燕尾槽内,所述导热粒另一端设置有导热带,所述导热带与摄像头模块固定连接,摄像头模块上的热量可以良好的传递到外界,具有出色的散热能力。
作为优选,所述弧形齿条侧面设置有连接风翼,所述连接风翼与燕尾槽间隙配合,所述连接风翼设置有一个以上,所述连接风翼以减速电机的输出轴为中心呈环形阵列分布,所述连接风翼插入燕尾槽内,所述连接风翼位于散热片的一侧,所述驱动齿轮位于燕尾榫的前方,所述连接风翼与驱动齿轮为一体式设置,通过设置有连接风翼,在眨眼的时候能够对燕尾榫内起到换气的作用,能够将热空气排到外界同时将冷空气输送到燕尾榫内,能够进一步的提升散热效果,避免眼球部内的设备过热。
作为优选,所述眼皮部与安装架为一体式设置,所述安装架上设置有编码器,所述编码器与减速电机连轴设置,通过设置有编码器,能够有利于工作人员采用控制装置编程控制眨眼的工作,为工作提供重要的控制依据。
作为优选,所述安装架上设置有储水箱,所述眼皮部内设置有将液体导流至球面透镜的导液孔道,所述储水箱上连有将其内部的液体抽进导液孔道的抽水泵,所述抽水泵两端分别与储水箱和导液孔道相连通,所述储水箱与眼皮部之间设置有支撑杆,所述支撑杆两端分别与储水箱和眼皮部固定连接,通过配置有抽水泵,能够将储水箱内的液体抽到导液孔道内,使得液体可以流道眼球部上,可以有效的提升拭擦的效果,同时又能够提升仿生度。
作为优选,所述眼球部设置有为其作眨眼活动提供辅助动力的弹射装置,通过配置有弹射装置,能够为开始工作的时候提供动力,降低减速电机的负担,有利于提升眨眼动作的速度。
作为优选,所述弹射装置包含有舵机、第一连接板和第二连接板,所述第一连接板和第二连接板转动连接,所述第一连接板和第二连接板之间设置有三角体状支撑保持架,所述三角体状支撑保持架与第一连接板固定连接,所述第二连接板上设置有配重条,所述第二连接板与配重条固定连接,所述第一连接板和第二连接板通过三角体状支撑保持架和配重条使得弹射前状态保持为钝角状设置,所述舵机位于眼球部内,所述舵机的输出轴上连有动力臂,所述动力臂上设置有拉绳,所述眼球部上设置有与拉绳相配对的绳孔,所述拉绳一端与动力臂固定连接,所述拉绳另一端与第二连接板固定连接。
作为优选,所述第二连接板上设置有抵住眼皮部的转轮体,所述转轮体与第二连接板转动连接,通过配置有转轮体,工作时与眼皮部的接触摩擦较少。
作为优选,所述眼皮部和驱动齿轮上均设置有减重槽,所述眼球部内设置有与舵机相配对的安装座,所述舵机与安装座固定连接,通过配置有减重槽,能够进一步的降低减速电机的负担。
本发明还提供一种机器人,包括上述的机器人的结构单元。
本发明的有益效果为:由于眼球部和眼皮部之间设置有用于拭擦球面透镜表面并使得眼球部和眼皮部之间胀紧的海绵拭擦垫,在实现眨眼的动作时,海绵拭擦垫能够对眼球部和球面透镜进行拭擦,能够有效的降低因污染物或异物附着在眼球部和球面透镜上,而对内部的摄像元件的工作造成影响,与传统的眨眼结构相比功能性更强,仿生程度高。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
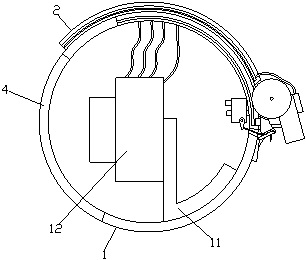
图1为本发明一种机器人的结构单元的剖面图。
图2为本发明一种机器人的结构单元的眼球部的结构示意图。
图3为本发明一种机器人的结构单元的安装架处的结构示意图。
图4为本发明一种机器人的结构单元的驱动齿轮穿过第二穿孔并插入燕尾槽后的结构示意图。
图5为本发明一种机器人的结构单元的储水箱处的剖视图。
图6为本发明一种机器人的结构单元的弹射装置安装处的剖视图。
图中:
1、眼球部;2、眼皮部;3、燕尾槽;4、球面透镜;5、燕尾榫;6、海绵拭擦垫;7、安装架;8、减速电机;9、驱动齿轮;10、弧形齿条;11、散热架;12、摄像头模块;13、导热粒;14、散热片;15、连接风翼;16、编码器;17、储水箱;18、导液孔道;19、抽水泵;20、支撑杆;21、舵机;22、第一连接板;23、第二连接板;24、三角体状支撑保持架;25、配重条;26、动力臂;27、拉绳;28、转轮体。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在实施例中,需要理解的是,术语“中间”、“上”、“下”、“顶部”、“右侧”、“左端”、“上方”、“背面”、“中部”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
另外,在本具体实施方式中如未特别说明部件之间的连接或固定方式,其连接或固定方式均可为通过现有技术中常用的螺栓固定,或钉销固定,或销轴连接,或粘合固定,或铆接固定等常规方式,因此,在实施例中不在详述。
实施例1
如图1-6所示,一种机器人的结构单元,包括眼球部1和眼皮部2,所述眼球部1上设置有燕尾槽3和安装孔(未图示),所述安装孔内设置有球面透镜4,所述球面透镜4与眼球部1固定连接并形成球型设置,所述燕尾槽3位于球面透镜4的后方并由眼皮部2盖住,所述眼皮部2上设置有与燕尾槽相配对的燕尾榫5,所述眼球部1和眼皮部2通过燕尾榫5和燕尾槽3滑动连接,所述眼球部1和眼皮部2之间设置有用于拭擦球面透镜4表面并使得眼球部1和眼皮部2之间胀紧的海绵拭擦垫6,所述海绵拭擦垫6与眼皮部2的背面粘合,所述海绵拭擦垫6上设置有与燕尾榫5相配对的第一穿孔(未图示),所述燕尾榫5穿过第一穿孔设置,所述眼皮部2上设置有安装架7,所述安装架7上设置减速电机8,所述减速电机8的输出轴上设置有驱动齿轮9,所述眼皮部2和海绵拭擦垫6均设置有与驱动齿轮9相配对的第二穿孔(未图示),所述驱动齿轮9穿过第二穿孔并插入燕尾槽3内,所述燕尾槽3内设置有与驱动齿轮9相配对的弧形齿条10,所述弧形齿条10与燕尾槽3的槽底固定连接,所述弧形齿条10位于燕尾榫5的下方并与其形成有间隙。
实施例2
如图1-6所示,一种机器人的结构单元,包括眼球部1和眼皮部2,所述眼球部1上设置有燕尾槽3和安装孔(未图示),所述安装孔内设置有球面透镜4,所述球面透镜4与眼球部1固定连接并形成球型设置,所述燕尾槽3位于球面透镜4的后方并由眼皮部2盖住,所述眼皮部2上设置有与燕尾槽相配对的燕尾榫5,所述眼球部1和眼皮部2通过燕尾榫5和燕尾槽3滑动连接,所述眼球部1和眼皮部2之间设置有用于拭擦球面透镜4表面并使得眼球部1和眼皮部2之间胀紧的海绵拭擦垫6,所述海绵拭擦垫6与眼皮部2的背面粘合,所述海绵拭擦垫6上设置有与燕尾榫5相配对的第一穿孔(未图示),所述燕尾榫5穿过第一穿孔设置,所述眼皮部2上设置有安装架7,所述安装架7上设置减速电机8,所述减速电机8的输出轴上设置有驱动齿轮9,所述眼皮部2和海绵拭擦垫6均设置有与驱动齿轮9相配对的第二穿孔(未图示),所述驱动齿轮9穿过第二穿孔并插入燕尾槽3内,所述燕尾槽3内设置有与驱动齿轮9相配对的弧形齿条10,所述弧形齿条10与燕尾槽3的槽底固定连接,所述弧形齿条10位于燕尾榫5的下方并与其形成有间隙。
在本实施例中,所述眼球部1内设置有散热架11,所述散热架11上设置有摄像头模块12,所述摄像头模块12位于球面透镜4的后方,所述燕尾槽3的槽底上设置有安装孔(未图示),所述安装孔设置有一个以上,所述安装孔位于弧形齿条10的侧面,所述安装孔内插入有导热粒13,所述导热粒13一端设置有散热片14,所述散热片14位于燕尾槽3内,所述导热粒13另一端设置有导热带(未图示),所述导热带(未图示)与摄像头模块12固定连接,摄像头模块12上的热量可以良好的传递到外界,具有出色的散热能力。
在本实施例中,所述弧形齿条10侧面设置有连接风翼15,所述连接风翼15与燕尾槽3间隙配合,所述连接风翼15设置有一个以上,所述连接风翼15以减速电机8的输出轴为中心呈环形阵列分布,所述连接风翼15插入燕尾槽3内,所述连接风翼15位于散热片14的一侧,所述驱动齿轮9位于燕尾榫5的前方,所述连接风翼15与驱动齿轮9为一体式设置,通过设置有连接风翼15,在眨眼的时候能够对燕尾榫内起到换气的作用,能够将热空气排到外界同时将冷空气输送到燕尾榫内,能够进一步的提升散热效果,避免眼球部内的设备过热。
在本实施例中,所述眼皮部2与安装架7为一体式设置,所述安装架7上设置有编码器16,所述编码器16与减速电机8连轴设置,通过设置有编码器16,能够有利于工作人员采用控制装置编程控制眨眼的工作,为工作提供重要的控制依据。
在本实施例中,所述安装架7上设置有储水箱17,所述眼皮部2内设置有将液体导流至球面透镜的导液孔道18,所述储水箱17上连有将其内部的液体抽进导液孔道的抽水泵19,所述抽水泵19两端分别与储水箱17和导液孔道18相连通,所述储水箱17与眼皮部2之间设置有支撑杆20,所述支撑杆20两端分别与储水箱17和眼皮部2固定连接,通过配置有抽水泵19,能够将储水箱内的液体抽到导液孔道内,使得液体可以流道眼球部上,可以有效的提升拭擦的效果,同时又能够提升仿生度。
在本实施例中,所述眼球部1设置有为其作眨眼活动提供辅助动力的弹射装置,通过配置有弹射装置,能够为开始工作的时候提供动力,降低减速电机的负担,有利于提升眨眼动作的速度。
在本实施例中,所述弹射装置包含有舵机21、第一连接板22和第二连接板23,所述第一连接板22和第二连接板23转动连接,所述第一连接板22和第二连接板23之间设置有三角体状支撑保持架24,所述三角体状支撑保持架24与第一连接板22固定连接,所述第二连接板23上设置有配重条25,所述第二连接板23与配重条25固定连接,所述第一连接板22和第二连接板23通过三角体状支撑保持架24和配重条25使得弹射前状态保持为钝角状并撑住眼皮部设置,所述舵机21位于眼球部1内,所述舵机21的输出轴上连有动力臂26,所述动力臂26上设置有拉绳27,所述眼球部1上设置有与拉绳27相配对的绳孔(未图示),所述拉绳27一端与动力臂26固定连接,所述拉绳27另一端与第二连接板23固定连接。
在本实施例中,所述第二连接板23上设置有抵住眼皮部的转轮体28,所述转轮体28与第二连接板23转动连接,通过配置有转轮体28,工作时与眼皮部2的接触摩擦较少。
在本实施例中,所述眼皮部2和驱动齿轮9上均设置有减重槽(未图示),所述眼球部1内设置有与舵机21相配对的安装座(未图示),所述舵机21与安装座固定连接,通过配置有减重槽,能够进一步的降低减速电机的负担。
本发明还提供一种机器人,包括上述的机器人的结构单元。
本发明的有益效果为:由于眼球部和眼皮部之间设置有用于拭擦球面透镜表面并使得眼球部和眼皮部之间胀紧的海绵拭擦垫,在实现眨眼的动作时,海绵拭擦垫能够对眼球部和球面透镜进行拭擦,能够有效的降低因污染物或异物附着在眼球部和球面透镜上,而对内部的摄像元件的工作造成影响,与传统的眨眼结构相比功能性更强,仿生程度高。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。
- 机器人结构单元、机器人及机器人构建方法
- 一种机器人的结构单元及机器人