一种检测智能驾驶HMI功能的测试平台
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及智能驾驶和汽车人机交互领域,具体涉及检测智能驾驶HMI功能的测试平台。
背景技术
随着人工智能兴起的浪潮,许多行业产生了革命性的创新,其中智能驾驶已经成为汽车行业未来的趋势。
智能驾驶技术旨在使用传感器、控制器、通讯模块等设备获取驾驶实时信息,以辅助人进行驾驶,以及在某些场景下能够完全取代人进行驾驶。当前汽车行业普遍遵循SAE协会定义的6个智能驾驶等级,从L0极到L5极;L2级别以下的智能驾驶也被称为高级驾驶辅助系统(ADAS),只在特定场景下为驾驶员提供协助,驾驶决策权仍在驾驶员;而L4级及以上则是汽车主导驾驶;L3级智能驾驶只在一些特定场景下可以取代人驾驶,并且在系统失效时需要驾驶员提供协助,驾驶决策权仍在驾驶员,而L4级别及以上则是汽车主导驾驶;L3级智能驾驶只在一些特定场景下可以取代人驾驶,并且在系统失效时需要驾驶员接替,目前大部分车企的研发重心就在于L3级,而对于L3级以上的智能驾驶,人车关系被重新定义,人从驾驶员转变为智能驾驶汽车的监管者,因此,HMI(人机交互界面)作为人与汽车交流的直接通道,也是车内用户体验的关键要素,在智能驾驶汽车的研发中拥有关键作用。
对传统汽车而言,驾驶员全权负责驾驶汽车,传统HMI是以驾驶行为为核心设计的,注重驾驶员的注意力迁移和认知负荷过载,而智能驾驶汽车通过辅助驾驶,能够允许驾驶人员在驾驶时释放更多的注意力,因此智能驾驶HMI的设计核心是建立驾驶人员对智能驾驶系统的信任,智能汽车的HMI要提供最好的乘坐体验,首先必须与驾驶员建立信任,系统必须让驾驶员易于理解,这就需要收集驾驶员在驾驶时必需的信息和发出的信息来构建HMI,因此需要测试收集驾驶员在驾驶时的各项信息数据,但是对于尚未开发完全和确认安全性的智能驾驶系统,实路测试存在风险,这种情况就需要使用虚拟测试平台来进行驾驶测试。
公开号为CN109144269A的中国专利文献公开了名称为“一种虚拟驾驶方法和系统”的专利,该方法包括:获取驾驶场景;在驾驶场景中识别驾驶员的手势动作,确定与手势动作对应的驾驶操作;根据驾驶操作,生成对应的虚拟驾驶信号;根据虚拟驾驶信号,生成虚拟驾驶图像信息;显示虚拟驾驶图像信息,该专利仅生成了虚拟驾驶信息,且采集的数据没有针对性,泛化的数据对于测试特定对象的功能的意义有限。
公开号为CN111007738A的中国专利文献公开了名称为“一种用于自动驾驶算法仿真测试的软件在环平台”,该平台包括外界设备、仿真平台和测试环境,外界设备和仿真平台共同连接测试环境,外界设备包括测试车辆,测试车辆车内设有信号采集设备、控制单元和传输单元,信号采集设备包括传感器、摄像头和导航接收模块,信号采集设备信号输出连接有控制单元,控制单元连接有传输单元,该专利针对驾驶算法的子系统进行测试,但是采集的数据也没有针对性,采集的泛化数据对于特定对象的功能测试作用有限。
公开号为CN109637262A的中国专利文献公开了名称为“一种基于真实和虚拟驾驶技能结合的模拟驾驶平台”,该专利包括基座,运动凭条,显示装置,运动平台呈矩形设置,运动平台包括下平台,底部设置有六个万向铰链的上平台,下平台下表面的四个对角处设置有圆形螺钉,下平台上表面靠近显示装置的一端有第一电动缸组,下平台上表面的另一端设置有第二电动缸组合第三电动缸组,上平台的上表面一端设置有两个对称设置的座椅安装座,另一端并排设置有方向盘组件安装座和踏板组件安装座,该专利基于实车情况,通过下平台和上平台组成能够在空间进行六个自由度运动的运动平台,并且采用大视场显示技术和六自由度运动平台,从而为驾驶者提供高拟真度还原实车驾驶体验,该专利并没有涉及到真实的驾驶场景,仅仅对驾驶平台进行了一定的改进,且没有涉及到采集数据。
公开号为CN111044939A的中国专利文献公开了名称为“一种面向航电HMI接口的智能测试系统及测试方法”,该专利包括自动测试模块、图像识别模块和机械臂模块;自动测试模块分别与图像识别模块和机械臂模块相连,系统通过人工编辑测试用例,给图像识别模块和机械臂模块下达测试任务,图像识别模块对测试目标进行定位,将定位坐标发送给机械臂模块,由机械臂模块中的控制器控制机械手进行操作,完成测试任务。该专利通过编辑测试用例,利用视觉引导技术引导机械臂对测试目标进行测试,该专利没有涉及相关数据的采集,且该专利没有涉及虚拟驾驶场景的搭建。
发明内容
本发明的目的是提供一种检测智能驾驶HMI功能的测试平台,解决的技术问题:目前没有一种测试平台专门针对智能驾驶HMI功能进行测试,以验证HMI,判断HMI性能如何、是否符合人机工程。
为了解决上述技术问题,本发明提供了一种检测智能驾驶HMI功能的测试平台,所述平台预装载有需要测试的用例驱动HMI原型及若干设备,所述平台及设备形成用于检测智能驾驶HMI功能的模拟现实的驾驶情景;所述设备包括:
抬头显示器,用于直接模拟道路场景和安全区域警告;
智能驾驶仪表盘,用于向驾驶员传达自动驾驶系统状态;
驾驶监控器,用于确认在交还汽车控制权之前确定驾驶员注视方向;
方向盘和换挡杆,用于指示并逐渐移交或获取驾驶权;
智能驾驶中控,用于为所有乘员显示智能驾驶汽车的实时反馈和行驶目的地,且允许乘员从所有座位上的控制台设定目的地;
驾驶座,其下方坐垫添加有触觉反馈设备;
油门踏板,其负责将控制权交还给驾驶员时保持车速;
系统控制器,用于协调HMI组件之间的消息传递、完全控制状态机、网关链接其他汽车系统;
中型平板电脑,用于在测试期间控制用户交互的预设方案、显示智能驾驶状态。
优选地,所述设备还包括地面实况传感器、摄像头及激光雷达。
优选地,所述抬头显示器的硬件需求需要确定连接件类型、全彩LCD、电动调整可视角度;控制所述硬件的软件具有显示车道线、目标车轮廓、警报信息以及控制反射器位置的功能。
优选地,所述智能驾驶仪表盘的硬件为全彩LCD、RGB LED显示,软件具有控制所述全彩LCE、RGB LED显示的颜色的功能。
优选地,所述驾驶监控器为Tobii眼动仪4C,且通过SDK解锁原始数据流。
优选地,所述方向盘和换挡杆具有指导驾驶员驾驶功能,具有自启停自动驾驶模式;所述方向盘上RGB的LED灯沿方向盘边缘分布,方向盘不设置移除控制电子设备的安全气囊和充气机;在所述换挡杆末端设置A按钮和绿色LED灯;控制所述方向盘和换挡杆的软件具有监控转向角、控制所述RGB的LED灯,且接收来自所述换挡杆的按钮的输入的功能。
优选地,所述智能驾驶中控的硬件包括LCD中央显示器和中央控制旋钮。
优选地,所述油门踏板具有伺服电动机组件。
优选地,所述平台为Arduino开源电子原型平台;所述系统控制器使用的是dSpaceMicroAutobox II;所述中型平板电脑预安装WINDOWS 10系统。
通过采用上述技术方案,本发明可达到的有益技术效果陈述如下:研发人员开发出来的HMI有可能仅仅是一个demo,其具体性能如何,是否符合人机工程,还未有定论,另外即使一个成型的HMI也有可能存在改进点,本发明可以验证HMI的demo,以优化HMI,同时提升用户体验;本发明在平台集成了地面实况传感器、摄像头及激光雷达,复杂路况复现简单,复现效率高,测试成本低;本发明的智能驾驶改造的方向盘和换挡杆等设备经过优化更适宜有针对性的收集数据,通过视觉仿真、视觉与触觉跟踪以及触觉反馈,实现对整个驾驶舱设计包括虚拟显示和作动器进行HMI测试和验证。
附图说明
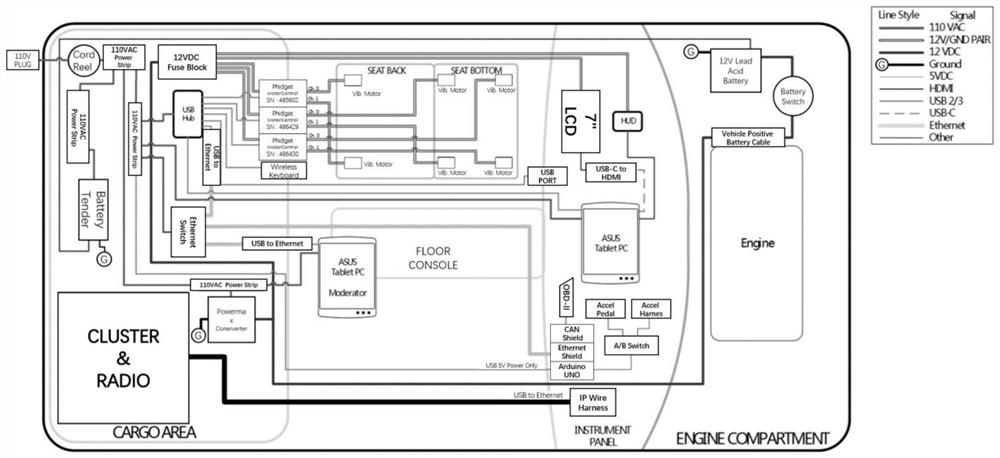
图1为C301车型顶层视图;
图2为中控数据传输图;
图3为描述用于控制EPS模块的组件;
图4为测试实验举例图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明进一步详细说明。
HMI是Human Machine Interface的缩写,“人机接口”,也叫人机界面,是系统和用户之间进行交互和信息交换的媒介,它实现信息的内部形式与人类可以接受形式之间的转换。汽车HMI设计主要是研究人于汽车的人机交互界面,“界面”只是一个形容词,界面包含开关、按钮、大屏、语音等等。内饰设计和HMI强相关,但也有区别,内饰设计强调的是主观整体感受,HMI是承担人与车之间有效信息交互的载体,侧重的是人与界面、人与车各系统的体验感受。
目前各个主流主机厂的HMI开发流程不尽相同,整体思路是一致的,在整车设计过程中,HMI设计是一个多学科、跨部门、合作交叉的形式存在的,通常会有一到两个部门牵头组建HMI设计团队,通过项目的形式进行开发设计。涉及到的部门包含市场销售部、电子电器部、软件工程部、设计部、整车集成部、质保售后部等,各职能部门根据分工不同提供相应的输出给到HMI设计团队,HMI团队通过收集需求来设计整体人机界面的交互方案。
当HMI仅仅是一个demo的时候,其功能怎样,是否符合人机工程,用户的交互体验怎么样,都需要验证。即使一个成型的HMI,往往也存在改进点,因此需要一个工具来对HMI进行测试。
参见图1,为C301车型顶层视图,本发明使用的平台是Arduino开源电子原型平台,Arduino是一款便捷灵活、方便上手的开源电子原型平台,包含硬件(各种型号的Arduino板)和软件(ArduinoIDE)。Arduino构建于开放原始码simple I/O介面版,并且具有使用类似JAVA、C语言的Processing/Wiring开发环境。主要包含两个部分:硬件部分可以用做电路连接的Arduino电路板;另外一个则是Arduino IDE,计算机中的程序开发环境。只要在IDE中编写程序代码,将程序上传到Arduino电路板,程序便会告诉Arduino电路板要做些什么。Arduino能通过各种各样的传感器来感知环境,通过控制灯管、马达和其他的装置来反馈、影响环境,板子上的微控制器可以通过Arduino的编程语言来编写程序,编译成二进制文件,烧录进微控制器。对Arduino的编程是通过Arduino编程语言和Arduino开发环境(基于Processing)来实现的。Arduino可以使用现有的电子元件例如开关或者传感器或者其他控制器件。Arduino也可以独立运行,并与软件进行交互,例如:Adobe Flash,Processing,Max/MSP,Pure Data,VVVV或其他互动软件,Arduino的IDE界面基于开放源代码,可以免费下载使用。
参见图1,C301车型顶层主要包含三个部分,ENGINE COMPARTMENT(发动机舱)、INSTRUMENT PANEL(仪表板)、CARGO AREA(货物区);车顶前部为ENGINE(发动机),vehidepositive battery cable(车辆正极蓄电池电缆)连接12V Lead ACID BATTERY(12V铅酸蓄电池);发动机舱的左侧(通常方位判定)为INSTRUMENT PANEL(仪表板),仪表板内有CANSHIELD(屏蔽罩)、ethernet shield(以太网屏蔽)、ARDUINO UNO、加速踏板(Accel pedal)、Accel harnes(加速线束),还有PC(图中所示为华硕平板电脑),参见仪表板的左侧有HUD(抬头显示器),用于直接模拟道路场景和安全区域警告。在货物区和仪表板之间的位置有seat bottom(座椅靠背)和seatback(座椅底部),靠背及底部皆安装有振动电机(vibmotor),图1仅仅是示意图,还有其他的设备并没有表示出来,为了突出强调本发明使用的是Arduino开源电子原型平台,Arduino提供了硬件和软件,安装在此平台上面的设备和ARDUINO协作,完成对HMI的测试。
本测试平台还包括以下设备:
智能驾驶仪表盘,用于向驾驶员传达自动驾驶系统状态;
驾驶监控器,用于确认在交还汽车控制权之前确定驾驶员注视发那个像;
方向盘和换挡杆,用于指示并逐渐移交或获取驾驶权;
智能驾驶中控,用于为所有乘员显示智能驾驶汽车的实时反馈和行驶目的地,且允许乘员从所有座位上的控制台设定目的地;
驾驶座,其下方坐垫添加有触觉反馈设备,且要求车道偏离频率低、警报频率高;
油门踏板,其负责将控制权交还给驾驶员时保持车速;
系统控制器,用于协调HMI组件之间的消息传递、完全控制状态机、网关链接其他汽车系统;
中型平板电脑,用于在测试期间控制用户交互的预设方案、显示智能驾驶状态。
可选地,设备还包括底面实况传感器、摄像头、激光雷达;
可选地,抬头显示器的硬件需求需要确定连接件类型、全彩LCD、电动调整可视角度;控制硬件的软件具有显示车道线、目标车轮廓、警报信息以及控制反射器位置的功能;
可选地,智能驾驶仪表盘的硬件为全彩LCD、RGB LED显示,软件具有控制所述全彩LCE、RGB LED显示的颜色的功能;
可选地,驾驶监控器为Tobii眼动仪4C,且通过SDK解锁原始数据流;
可选地,所述方向盘和换挡杆具有指导驾驶员驾驶功能,具有自启停自动驾驶模式;方向盘上RGB的LED灯沿方向盘边缘分布,方向盘不设置控制电子设备的安全气囊和充气机;在换挡杆末端设置A按钮和绿色LED灯;控制方向盘和换挡杆的软件具有监控转向角、控制RGB的LED灯,且接收来自换挡杆的按钮的输入的功能;
可选地,智能驾驶中控的硬件需求需要LCD中央显示器和中央控制旋钮;
可选地,油门踏板具有伺服电动机组件(改变弹力),同时添加机制限制行程;
可选地,平台为Arduino开源电子原型平台;系统控制器使用的是dSpaceMicroAutobox II;中型平板电脑预安装WINDOWS 10系统。
上述各个设备组件之间都是通过中控来控制消息传递,设定好中控的IP地址与接口,不同的组件使用不同的接口,不同数据类型由不同的数据接口进行收发。以眼动仪程序为例,它从中控受到状态消息和模式ID,模式ID为-1时代表停止所有设备;大于-1则执行所需的模式持续时间;等于0则停止与模式ID对应的设备;大于0则将气用作持续时间,眼动仪程序返回的信号是触觉激活信息;另外本平台带有CAN shield(屏蔽罩)负责发送转向扭矩信号给汽车EPS,模拟行驶中车辆的方向盘重量(即使在用户学习时车处于静止状态)仍需要成比例的定心扭矩,该扭矩由行驶车辆的前悬架的几何形状产生,但需要Arduino平台仿真,可以从实际车中测量力和角度的反馈,且AD中方向盘随机移动大约0度量,此外,由于大多数模拟驾驶都将在品质的道路中进行,因此Arduino应该引入方向盘的轻微随机运动,这通常是保持车辆在车道中线所需的,可以通过将随机角度(大于等于-10度小于等于10度)添加到抬头显示器从获得的目标转向角并将气用作PID控制器的目标来实现,为防止PID不稳定,增加的值不应为纯随机数,会导致不连续,而应采用缓慢移动的功能,以确保从一个值到另一个值的平滑变化(实用正弦值或周期性对称函数),AD中的SW随机移动和手动模式下的强制反馈都应该能够通过UDP消息打开/关闭。
参见图2,为中控数据传输图,其中黑色实心箭头代表Received from Central,空心箭头为sent to central,CENTRAL CONTROLLER(中央控制器)最主要的功能是控制信息的传递,首先应该设定central controller的IP地址与接口,不同的组件使用不同接口,不同数据类型由不同的数据接口进行收发,各个组件皆有与中央控制器的交互行为发生,图2中的组件包括EYE TRACKER APP(眼动追踪应用程序)、haptic feedback app(触觉反馈应用程序)、display controller app(显示控制器应用程序)、virtual steering wheelbuttons tablets(虚拟方向盘按钮)、Arduino to control hands sensing&LED stripson steering wheel,即控制手感应的Arduino和方向盘上的LED灯带,Arduino epscontroller(汽车电动助力转向系统控制器)、PRESCAN(预扫描器)、wizard drivermonitor tablet(向导驱动程序监视板);软件和硬件相互协作,它们之间进行了数据通信,以实现应用程序对相应硬件的控制,但是最终都会通过中央控制器来控制消息传递。
参见图3,为描述用于控制EPS模块的组件,上述中央控制器(centralcontroller)参与对EPS的控制。本发明使用的平台是Arduino,因此中央控制器、预扫描器、车载CAN(VEHICLE CAN)、油门踏板(throttle pedal)皆通过Arduino实现对EPS的控制,例如,arduino向prescan从几个角度发送一些指令,表明正在手动或自动转向等等,这些角度包括sw角、节流阀、刹车、档位超控、闪烁状态等。
本发明基于Arduino开源电子原型平台和安装的各种设备,实现对HMI的demo的验证,模拟测试平台可以为驾驶员提供接近于显示驾驶的体验,也能够使驾驶员在驾驶过程中的反应与注意力与显示驾驶情景中几乎等同,通过集成地面实况传感器、摄像头及激光雷达等设备可以准确复原场景,再将场景图形可视化显示在前屏幕上,以虚拟方式评估智能驾驶;通过设定多种驾驶场景、交通状况以及车辆动态运行时间,获取在不同状况下驾驶员的视觉信息、操作方向盘和油门的动作信息等,通过视觉仿真、视觉与触觉跟踪以及触觉反馈,对整个驾驶舱设计包括虚拟显示和作动器进行HMI测试和验证。
本发明的实施例设计了18个任务场景用于测试评价IACC,17个任务场景用于测试评价TJP,同时要评价这些任务的表现,分析失败原因。
以18个IACC测试用例做参考,具体的测试用例要求与预测驾驶员反映分别如下:
第一个IACC测试用例:直路IACC可用状态下,驾驶员加速至限速速度并保持车辆在中间车道,预测识别到限速标致,驾驶员踩下油门,保持车速与车辆位置。
第二个IACC测试用例:直路激活IACC模式,要求驾驶员开启集成式自适应巡航功能,预测按下自适应巡航按键,设置速度与距离。
第三个IACC测试用例:弯道,要求驾驶员控制速度,轻握方向盘,预测反应为让车辆在不受干涉的情况下通过弯道。
第四个IACC测试用例:直路,有行人通过马路,预测反应为控制车辆在不受干涉的情况下规避行人。
第五个IACC测试用例:直路,前车切入车道,预测反应为控制车辆在不受干涉的情况下绕切口转动。
第六个IACC测试用例:直路,前车紧急刹车,预测反应为驾驶员让车辆在不受干涉的情况下应对前车紧急切入。
第七个IACC测试用例:直路,要去驾驶员调整时距,将跟车距离调整到最小,预测反应是使用时距调整按键调整跟车距离。
第八个IACC测试用例:直路,前车停车时间超过最长时间限制,然后驶离,要去驾驶员需要恢复车辆功能,预测反应为驾驶员踩油门使车辆前行,在提示信息显示后松开油门。
第九个IACC测试用例:直路,跟随一辆慢速行驶的前车,实用UDLC变换到右侧车道,要求驾驶员实用自动变道功能进行变道,预测反应为驾驶员拨动右转向拨杆,让车辆在不受干涉的情况下转入右侧车道。
第十个IACC测试用例:直路,要求驾驶员使用UDLC再次尝试向右变道,即使右侧车道正在消失,预测反应为驾驶员打开右转向灯,读识显示的信息并不干涉IACC。
第十一个IACC测试用例:直路,要求驾驶员使用UDLC向左变道,但一辆从后方驶来的车辆正在靠近并超越本车,预测反应为驾驶员打开右转向灯,读识显示的信息并不干涉IACC。
第十二个IACC测试用例:直路,要求驾驶员实用UDLC变回中间车道,预测驾驶员打开右转向灯,让车辆在不受干涉的情况下向左变道。
第十三个IACC测试用例:直路,要求驾驶员踩油门踏板,预测驾驶员踩油门踏板,识别到信息,驾驶员松油门踏板,恢复IACC。
第十四个IACC测试用例:直路,要求驾驶员不使用变道功能,向右变道,预测驾驶员手动变至右道,识别到信息,行驶到中间车道恢复IACC。
第十五个IACC测试用例:直路,要求驾驶员踩刹车,预测驾驶员自己控制住车辆。
第十六个IACC测试用例:直路,要求驾驶员加速到限速速度,开启IACC,预测驾驶员踩油门直到限速,自动开启IACC。
第十七个IACC测试用例:直路,要求驾驶员在平板电脑上看一部电影,预测驾驶员读取提示信息后,向后查看路况。
第十八个IACC测试用例:直路,要求驾驶员一直看电影,预测驾驶员读取信息后由系统接管车辆。
本发明中的用例驱动HMI原型,就是除了普通道路驾驶场景外还根据各种特别驾驶场景而提出相应功能需求,再根据这些需求开发出来适应这些特殊情况的HMI原型,一个HMI软件原型,只是包含了针对特别场景的功能,上述的十八个测试用例就是对应的场景,用来检测软件原型能否在这些场景中完成对应需求。
参见图4,为测试实验举例图,该场景是一段道路的用户警告,以下是场景限制:
第一,限速检测激活。
第二,HV位于道路企点的中央车道。
第三,HV在手动模式下以KM/H的速度启动。
所有方案完成后场景结束,实验场景如下:
第一,直路,有IACC,驾驶员以120KM/H的速度激活IACC。
第二,直路,速度适应性测试—系统适应张贴的速度限制标志。
第三,弯道,速度调整到弯道速度,汽车将以80KM/H的速度行驶,但没有任何迹象表明限速发生了变化。
第四,直路,要求受试者调整速度。
本发明的优点:研发人员开发出来的HMI有可能仅仅是一个demo,其具体性能如何,是否符合人机工程,还未有定论,另外即使一个成型的HMI也有可能存在改进点,本发明可以验证HMI的demo,以优化HMI,同时提升用户体验;本发明在平台集成了地面实况传感器、摄像头及激光雷达,复杂路况复现简单,复现效率高,测试成本低;本发明的智能驾驶改造的方向盘和换挡杆等设备经过优化更适宜有针对性的收集数据,通过视觉仿真、视觉与触觉跟踪以及触觉反馈,实现对整个驾驶舱设计包括虚拟显示和作动器进行HMI测试和验证。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种检测智能驾驶HMI功能的测试平台
- 一种具备在线内阻检测功能的电堆测试平台、系统及方法