高稳定性的柔性剪叉式升降机构及升降方法
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及一种汽车总装吊具系统,特别涉及一种基于电动自行小车的汽车总装吊具系统及其高稳定柔性剪叉式升降机构及控制方法。
背景技术
电动自行小车系统是汽车自动化组装生产线上的高空行走起吊设备,该自行小车设置并行走在总装车间内上空的吊轨上,通过小车自带电机驱动其行走,在自行小车底端吊接有载荷梁,在载荷梁下吊接有上部矩形框架,在矩形框架的下面设置有剪式升降装置,在剪式升降装置的下部,连接有底部矩行框架,在矩形框架底部设置有汽车总装吊具,在汽车总装吊具上进行流水式的汽车总装作业;在流水线上的不同总装工艺工位上进行汽车装配时,对总装吊具的高度要求是不同的,为了实现升降的目的,现有设备一般是通过在底部矩行框架与上部矩形框架之间的剪式升降装置来完成的,因为剪式升降装置能满足重载承载的刚性要求,当要求汽车总装吊具的升降距离较大时,由于该工位面积有限,现有设备只能通过设置多级剪叉连接型式来满足高度的要求,即,在第一级剪叉支架上方依次连接上级剪叉支架,这种上下两级剪叉支架是通过铰接连接方式连接在一起的,存在稳定性差的缺陷;另外,现有的剪叉式升降装置还存在升降调整柔性差和高度调整精度低的问题;如何解决汽车总装吊具运行的稳定性和升降调整的便捷性,成为现场急需要解决的一个问题,同时对设备的柔性化要求也越来越被重视。
发明内容
本发明提供了一种高稳定性的柔性剪叉式升降机构及升降方法,解决了现有设备存在的稳定性差和高度调整精度低的问题。
本发明的总体构思:采用单个剪叉式升降架,以满足重载升降刚性要求,将传统的十字交叉的中部铰接销轴去除,在每根剪叉臂上分别设置半口字形框架,将两个剪叉臂上的半口字形框架活动交叉套接在一起,以起到两个交叉臂升降时的铰接导向作用;将每根剪叉臂设计为内外套筒接插形式,将外套筒设置在剪叉十字架的上部,将内套筒设置在剪叉式十字架的下部,在外套筒与内套筒之间设置同步升缩机构,实现剪叉式十字架的下部内套筒的同步升缩,最终实现剪叉式十字架高稳定性的柔性升起和降落。
一种高稳定性的柔性剪叉式升降机构,包括底部矩形框架和顶部矩形框架,在顶部矩形框架的顶面上设置有双电机同步提升皮带驱动机构,在底部矩形框架的四个顶角上,分别设置有左前提升皮带轮、右前提升皮带轮、左后提升皮带轮和右后提升皮带轮,在双电机同步提升皮带驱动机构与提升皮带轮之间,分别设置有左前提升皮带、右前提升皮带、左后提升皮带和右后提升皮带,在顶部矩形框架的左端设置有顶部左侧铰链座,在顶部矩形框架的右端设置有顶部右侧铰链座,在底部矩形框架的左端设置有底部左侧铰链座,在底部矩形框架的右端设置有底部右侧铰链座,在顶部右侧铰链座上铰接有上部右侧外套筒,在底部左侧铰链座上铰接有下部左侧内套筒,下部左侧内套筒的上端活动插接在上部右侧外套筒的下端口中,在顶部左侧铰链座上铰接有上部左侧外套筒,在底部右侧铰链座上铰接有下部右侧内套筒,下部右侧内套筒的上端活动插接在上部左侧外套筒的下端口中;在上部右侧外套筒的后侧面上,设置有后侧半口字形框,在上部左侧外套筒的前侧面上,设置有前侧半口字形框,上部右侧外套筒通过其上的后侧半口字形框与上部左侧外套筒上的前侧半口字形框活动套接在一起,组成剪叉式支架;双电机同步提升皮带驱动机构是同步提升或同步降下,左前提升皮带、右前提升皮带、左后提升皮带和右后提升皮带的,从而实现底部矩形框架的水平升起或降下。
在下部左侧内套筒的顶端左侧面上设置有右上齿形同步带左侧压接块,在下部左侧内套筒的顶端右侧面上设置有右上齿形同步带右侧压接块,在顶部右侧铰链座上固定设置有右齿形同步带上带轮支架,在右齿形同步带上带轮支架上设置有右齿形同步带上带轮轮轴,在右齿形同步带上带轮轮轴上设置有右齿形同步带上带轮,在上部右侧外套筒的右侧面下端,设置有右齿形同步带下带轮,右齿形同步带的一端固定连接在右上齿形同步带左侧压接块上,右齿形同步带的另一端,从上部右侧外套筒中向上穿出,绕过右齿形同步带上带轮后向下,再绕过右齿形同步带下带轮后,向上穿入到上部右侧外套筒中,与右上齿形同步带右侧压接块固定连接在一起,从而实现,下部左侧内套筒在环形封闭的右齿形同步带的牵引下,在上部右侧外套筒中的自由升降;在上部左侧外套筒与下部右侧内套筒之间,设置有左齿形同步带,在顶部左侧铰链座上设置有左齿形同步带上带轮轮轴支架,在左齿形同步带上带轮轮轴支架上设置有左齿形同步带上带轮轮轴,在左齿形同步带上带轮轮轴上设置有左齿形同步带上带轮,在上部左侧外套筒、下部右侧内套筒和左齿形同步带之间的连接结构,是与右齿形同步带、右侧外套筒和下部左侧内套筒之间的连接结构完全相同的;在右齿形同步带上带轮轮轴上,设置有第一伞齿轮,在左齿形同步带上带轮轮轴上,设置有第三伞齿轮,在顶部右侧铰链座上,设置有同步旋转轴右侧支撑座,在顶部左侧铰链座上,设置有同步旋转轴左侧支撑座,在同步旋转轴右侧支撑座与同步旋转轴左侧支撑座之间,设置有同步轴,在同步轴的右端设置有第二伞齿轮,在同步轴的左端设置有第四伞齿轮,第二伞齿轮与第一伞齿轮啮合在一起,第四伞齿轮与第三伞齿轮啮合在一起,实现下部左侧内套筒与下部右侧内套筒的同步伸缩。
一种高稳定性的柔性剪叉式升降机构的升降方法,其特征在于以下步骤:
当需要将底部矩形框架平稳升起,使底部矩形框架与顶部矩形框架之间的间距缩短时,通过控制双电机同步提升皮带驱动机构,使左前提升皮带、右前提升皮带、左后提升皮带和右后提升皮带同步等速度向上提升,实现了底部矩形框架,在保持水平状态下,平稳地上升,这时,与底部矩形框架铰接的下部左侧内套筒的上端,就沿右侧外套筒的布置方向,在右侧外套筒内,向右上方方向移动,使下部左侧内套筒上端的,与同步带左侧压接块连接的,右齿形同步带上升,上升的右齿形同步带,依次通过右齿形同步带上带轮和右齿形同步带下带轮后,回到右上齿形同步带右侧压接块的连接处,从而实现了在环形封闭的右齿形同步带的牵引下,下部左侧内套筒的上端沿右侧外套筒的布置方向的上升;与此同时,右齿形同步带带动右齿形同步带上带轮的同步旋转,也带动了右齿形同步带上带轮轮轴的同步旋转,右齿形同步带上带轮轮轴上的第一伞齿轮通过与第二伞齿轮的啮合,使同步轴同步旋转,同步轴再依次通过第四伞齿轮、第三伞齿轮、左齿形同步带上带轮轮轴,使左齿形同步带上带轮同步旋转,从而通过环形封闭的左齿形同步带,实现了下部右侧内套筒的上端,沿左侧外套筒的布置方向的上升;下部左侧内套筒和下部右侧内套筒的上升,使右侧外套筒与上部左侧外套筒的十字交叉角度变大,上部右侧外套筒的后侧面上设置的后侧半口字形框,与在上部左侧外套筒的前侧面上设置的前侧半口字形框发生位置的相互移动,避免上部右侧外套筒与上部左侧外套筒的脱离,实现了底部矩形框架的水平升起。
本发明改变了传统的采用多级剪叉式串联方式,实现大行程升降的目的,采用了同步提升皮带的方式,实现顶部矩形框架与底部矩形框架之间距离的改变,在顶部矩形框架与底部矩形框架之间设置铰接的可伸缩的十字交叉的剪叉支撑架,实现两矩形框架在重载下的稳定连接,特别是可伸缩到两外套筒中的两内套筒,通过同步带及同步轴的连接,实现了两内套筒的柔性同步升降,大大提高了上下两矩形框架的稳定性。
附图说明
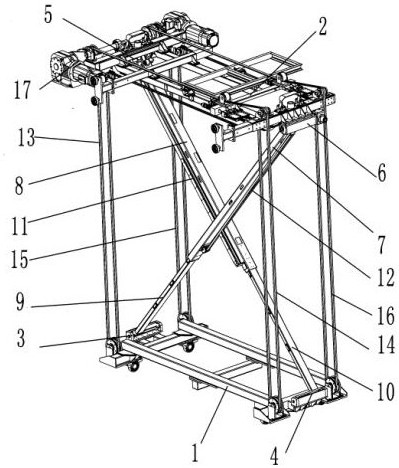
图1是本发明的结构示意图;
图2是本发明的两十字交叉的套筒中同步带的连接结构示意图;
图3是本发明的两下部内套筒与同步带之间的连接结构示意图。
具体实施方式
下面结合附图对本发明进行详细说明:
一种高稳定性的柔性剪叉式升降机构,包括底部矩形框架1和顶部矩形框架2,在顶部矩形框架2的顶面上设置有双电机同步提升皮带驱动机构17,在底部矩形框架1的四个顶角上,分别设置有左前提升皮带轮、右前提升皮带轮、左后提升皮带轮和右后提升皮带轮,在双电机同步提升皮带驱动机构17与提升皮带轮之间,分别设置有左前提升皮带13、右前提升皮带14、左后提升皮带15和右后提升皮带16,在顶部矩形框架2的左端设置有顶部左侧铰链座5,在顶部矩形框架2的右端设置有顶部右侧铰链座6,在底部矩形框架1的左端设置有底部左侧铰链座3,在底部矩形框架1的右端设置有底部右侧铰链座4,在顶部右侧铰链座6上铰接有上部右侧外套筒7,在底部左侧铰链座3上铰接有下部左侧内套筒9,下部左侧内套筒9的上端活动插接在上部右侧外套筒7的下端口中,在顶部左侧铰链座5上铰接有上部左侧外套筒8,在底部右侧铰链座4上铰接有下部右侧内套筒10,下部右侧内套筒10的上端活动插接在上部左侧外套筒8的下端口中;在上部右侧外套筒7的后侧面上,设置有后侧半口字形框12,在上部左侧外套筒8的前侧面上,设置有前侧半口字形框11,上部右侧外套筒7通过其上的后侧半口字形框12与上部左侧外套筒8上的前侧半口字形框11活动套接在一起,组成剪叉式支架;双电机同步提升皮带驱动机构17是同步提升或同步降下,左前提升皮带13、右前提升皮带14、左后提升皮带15和右后提升皮带16的,从而实现底部矩形框架1的水平升起或降下;底部矩形框架1的提升与降落,是依靠双电机同步提升皮带驱动机构17的驱动来实现的,上部右侧外套筒7与下部左侧内套筒9套接组合成一斜撑,上部左侧外套筒8与下部右侧内套筒10套接组合成另一斜撑,两斜撑十字交叉组成剪叉式支撑架,实现对底部矩形框架1与顶部矩形框架2支架的稳定支撑。
在下部左侧内套筒9的顶端左侧面上设置有右上齿形同步带左侧压接块18,在下部左侧内套筒9的顶端右侧面上设置有右上齿形同步带右侧压接块19,在顶部右侧铰链座6上固定设置有右齿形同步带上带轮支架,在右齿形同步带上带轮支架上设置有右齿形同步带上带轮轮轴23,在右齿形同步带上带轮轮轴23上设置有右齿形同步带上带轮21,在上部右侧外套筒7的右侧面下端,设置有右齿形同步带下带轮22,右齿形同步带20的一端固定连接在右上齿形同步带左侧压接块18上,右齿形同步带20的另一端,从上部右侧外套筒7中向上穿出,绕过右齿形同步带上带轮21后向下,再绕过右齿形同步带下带轮22后,向上穿入到上部右侧外套筒7中,与右上齿形同步带右侧压接块19固定连接在一起,从而实现,下部左侧内套筒9在环形封闭的右齿形同步带20的牵引下,在上部右侧外套筒7中的自由升降;在上部左侧外套筒8与下部右侧内套筒10之间,设置有左齿形同步带33,在下部右侧内套筒10的顶端分别设置有左上齿形同步带左侧压接块35和左上齿形同步带右侧压接块34,在上部左侧外套筒8的下部设置有左齿形同步带下带轮36,在顶部左侧铰链座5上设置有左齿形同步带上带轮轮轴支架,在左齿形同步带上带轮轮轴支架上设置有左齿形同步带上带轮轮轴31,在左齿形同步带上带轮轮轴31上设置有左齿形同步带上带轮32,在上部左侧外套筒8、下部右侧内套筒10和左齿形同步带33之间的连接结构,是与右齿形同步带20、右侧外套筒7和下部左侧内套筒9之间的连接结构完全相同的;在右齿形同步带上带轮轮轴23上,设置有第一伞齿轮24,在左齿形同步带上带轮轮轴31上,设置有第三伞齿轮29,在顶部右侧铰链座6上,设置有同步旋转轴右侧支撑座27,在顶部左侧铰链座5上,设置有同步旋转轴左侧支撑座28,在同步旋转轴右侧支撑座27与同步旋转轴左侧支撑座28之间,设置有同步轴26,在同步轴26的右端设置有第二伞齿轮25,在同步轴26的左端设置有第四伞齿轮30,第二伞齿轮25与第一伞齿轮24啮合在一起,第四伞齿轮30与第三伞齿轮29啮合在一起;两套环形闭合的同步带是通过顶部的同步轴及四个伞齿轮实现同步的,该套同步带系统无动力,自行实现自动运行,实现了两矩形框架的精准升降。
一种高稳定性的柔性剪叉式升降机构的升降方法,其特征在于以下步骤:
当需要将底部矩形框架1平稳升起,使底部矩形框架1与顶部矩形框架2之间的间距缩短时,通过控制双电机同步提升皮带驱动机构17,使左前提升皮带13、右前提升皮带14、左后提升皮带15和右后提升皮带16同步等速度向上提升,实现了底部矩形框架1,在保持水平状态下,平稳地上升,这时,与底部矩形框架1铰接的下部左侧内套筒9的上端,就沿右侧外套筒7的布置方向,在右侧外套筒7内,向右上方方向移动,使下部左侧内套筒9上端的,与同步带左侧压接块18连接的,右齿形同步带20上升,上升的右齿形同步带20,依次通过右齿形同步带上带轮21和右齿形同步带下带轮22后,回到右上齿形同步带右侧压接块19的连接处,从而实现了在环形封闭的右齿形同步带20的牵引下,下部左侧内套筒9的上端沿右侧外套筒7的布置方向的上升;与此同时,右齿形同步带20带动右齿形同步带上带轮21的同步旋转,也带动了右齿形同步带上带轮轮轴23的同步旋转,右齿形同步带上带轮轮轴23上的第一伞齿轮24通过与第二伞齿轮25的啮合,使同步轴26同步旋转,同步轴26再依次通过第四伞齿轮30、第三伞齿轮29、左齿形同步带上带轮轮轴31,使左齿形同步带上带轮32同步旋转,从而通过环形封闭的左齿形同步带33,实现了下部右侧内套筒10的上端,沿左侧外套筒8的布置方向的上升;下部左侧内套筒9和下部右侧内套筒10的上升,使右侧外套筒7与上部左侧外套筒8的十字交叉角度变大,上部右侧外套筒7的后侧面上设置的后侧半口字形框12,与在上部左侧外套筒8的前侧面上设置的前侧半口字形框11发生位置的相互移动,避免上部右侧外套筒7与上部左侧外套筒8的脱离,实现了底部矩形框架1的水平升起;本升降系统是通过同步齿形带及同步齿形带轮,精准实现同步运转,从而实现下矩形框架的精准升降;在两套筒的十字交叉处,将传统的铰接销轴去掉,改变为两半口字形框的套接,起到了既不妨碍两套筒的旋转升降,又起到将两十字交叉套筒活动连接到一起的目的。
- 高稳定性的柔性剪叉式升降机构及升降方法
- 一种自行走剪叉式移动升降平台的坑洞保护机构及工作方法