一种虾塘饵料投食方法、控制模块及装置
文献发布时间:2023-06-19 12:16:29
技术领域
本发明属于虾类养殖领域,具体涉及一种虾塘饵料投食方法、控制模块及装置。
背景技术
根据《2019中国渔业统计年鉴》,近年来,我国淡水虾养殖总产量占比相对稳定,2018年虾类总产量达343.8142万吨,同比增长17.8%。但与庞大养殖规模所配合的投饵设备的研发和推广相对滞后,虾塘养殖精准投饵技术仍然是相对薄弱的环节,
在虾塘养殖实践中,养殖人员为了使虾的取食形成规律性,从而便于饲养管理,故而在虾塘浅水区(离岸2米左右)中设置连续的投喂区,并在投喂区内进行投饵,如此,虾在经过一段时间的取食后,便养成了在投喂区攫取饵料的习性,通常,这个投喂区被称为该虾塘的“食道”。
人工投饵仍然是主要的投喂方式,依靠养殖户的经验去判断投饵量,养殖户沿着池塘抛洒饲料,这种方式投饵范围小,距离短,投喂不均匀,浪费饵料,影响水质以及虾的正常生长;也有采用岸基式投饵机或者将投饵机直接放置在投饵船上,这种方式饵料破碎料高,同样会污染水质,且无法准确控制投饵量。投饵技术和装备的性能直接影响了养殖环境、虾类的生长、饲料的利用率、养殖成本等。
国内外对于精准投饵技术的研究主要集中在定量机构的研究,常用的定量机构有螺旋输送式、旋转下料式、电磁铁吸拉式和旋转挡板下料式等。螺旋输送式是根据螺旋输送器的参数计算出输送量,实现定量投饵,但在池塘潮湿环境下,饲料易结块粘连,此方式不能输送粘性大、易结块的饲料,且螺旋输送破碎料高,螺旋和料槽易磨损。旋转下料式的饲料由进料口进入下料腔内,电机带动的叶轮通过旋转,将饲料由进料口传送到出料口,整个过程叶轮转过的角度需要由电机严格控制,叶轮每两个叶片之间的体积固定,当需要不同重量的饲料时,只要控制电机旋转角度,就可以控制投饲量,这种方式整体重心较高,且不能保证叶片之间每次落入的饲料量都是相同的,定量误差大。电磁铁吸拉式由电磁铁通电拉动料门挡板,使饲料落下,当电磁铁断电时,由拉力弹簧把电磁铁及料门挡板一起拉回到原始位置,完成间隔下料,这种方式不能实现连续下料,电磁铁往复运动产生的震动较强烈,对电磁线圈使用寿命影响较大。旋转挡板下料式通过步进电机精确控制下料口挡板旋转角度,控制下料口开度及其启闭,进而控制下料速度,这种方式料口挡板与料箱下料口间隙较大,且没有研究具体开口大小可达到的下料速度,不能达到精准投饵的需求。
综上,在目前已知的虾塘饵料投食方式中,未有一种能够解决饵料在虾塘内的均匀精准投饵的投饵方式。
发明内容
针对现有技术的不足,本发明提供一种虾塘饵料投食方法、控制模块及装置,能够解决饵料在虾塘内的均匀精准投饵。
为实现上述目的,本发明提供了如下技术方案为:
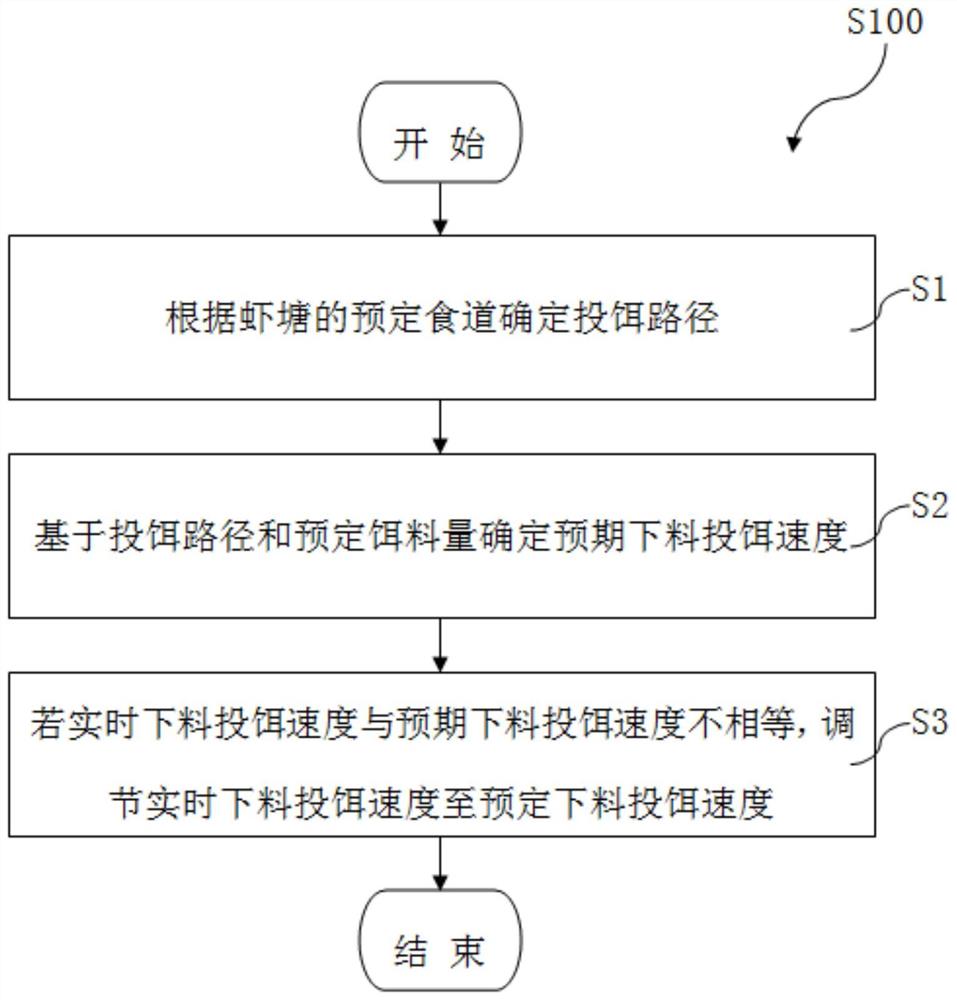
一种虾塘饵料投食方法,用于将预定饵料投放在虾塘内的预定食道上,其特征在于,包括以下步骤:
步骤S1:根据预定食道确定投饵路径;
步骤S2:基于投饵路径和预定饵料量确定预期下料投饵速度;
步骤S3:监控投饵路径上的实时下料投饵速度与预期下料投饵速度是否相等,若不相等,调节实时下料投饵速度至预定下料投饵速度。
优选地,投饵通过预定载具完成,且投饵方式采用振动下料投饵。
进一步地,将投饵路径的长度除以预定载具的速度得到下料投饵持续时间,将预定饵料量除以投饵持续时间得到预期下料投饵速度。
进一步地,在步骤S3中,预定载具具有用于容纳预定饵料的饵料箱,饵料箱具有用于投饵的投饵口,投饵口通过改变开放大小对实时下料投饵速度进行调节。
再进一步地,饵料箱具有测距传感器,测距传感器通过测量饵料箱内饵料的高度变化实现对实时下料投饵速度的监控。
一种虾塘投饵控制模块,包括处理器、存储器以及存储在存储器上并在处理器上执行的处理程序,其特征在于:当处理器执行处理程序时,虾塘投饵控制模块用于实施上述的虾塘饵料投食方法。
一种虾塘饵料投食装置,设置在双体船上,即上述的预定载具,其特征在于,包括连接组件,安装在双体船上;投饵单元,通过连接组件设置在双体船上,投饵单元包括饵料箱、设置在饵料箱的内部的顶部上的测距传感器以及设置在饵料箱内的振动马达,饵料箱和测距传感器为上述的饵料箱和测距传感器;以及投饵控制模块,为上述的虾塘投饵控制模块,其中,投饵单元还包括开放组件,开放组件包括电动推杆和开放板,饵料箱的底部呈斗状结构,最底部具有投饵口,电动推杆设置在饵料箱的底部的外表面,开放板安装在电动推杆的活动端,当电动推杆动作时,开放板封闭或者开放投饵口。
优选地,虾塘饵料投食装置还包括投饵滑道,沿与双体船的行进方向垂直的方向设置且向下倾斜,投饵滑道的上端位于投饵口的近旁的正下方。
优选地,连接组件包括连接架和弹簧缓冲架,连接架的一端安装在饵料箱的底部的外表面,另一端通过弹簧缓冲架与饵料箱的底部的外表面机械连接。
与现有技术相比,本发明的有益效果是:
1.因为本发明的虾塘饵料投食方法通过监控投饵路径上的实时下料投饵速度与预期下料投饵速度是否相等,若不相等,调节实时下料投饵速度至预定下料投饵速度,因此,本发明能够在因环境风浪过大、船体振动频繁以及投饵装置的机械误差等因素使得下料投饵速度受到影响而产生实际下料投饵速度与预期下料投饵速度不一致的情况下,及时保持实时下料投饵速度与预期下料投饵速度的一致,从而能够解决饵料在虾塘内的均匀精准投饵。
2.因为本发明的投饵方式采用振动下料投饵,因此,本发明通过简单的结构高效地实现了投饵过程中饵料的均匀稳定的下料,且破碎率低。
3.因为本发明采用的饵料箱具有测距传感器,测距传感器通过测量饵料箱内饵料的高度变化实现对实时下料投饵速度的监控,因此,本发明能够简单准确地实现对下料投饵速度的实时监控。
4.因为本发明的虾塘饵料投食装置,设置在双体船上,包括连接组件、投饵单元以及投饵控制模块,投饵单元还包括电动推杆和开放板,饵料箱的底部呈斗状结构,最底部具有投饵口,电动推杆设置在饵料箱的底部的外表面,当电动推杆动作时,开放板封闭或者开放投饵口,因而,虾塘饵料投食装置能够很好地自动化实施虾塘饵料投食方法,且结构简单,使用方便。
5.因为本发明的虾塘饵料投食装置还包括投饵滑道,沿与双体船的行进方向垂直的方向设置且向下倾斜,投饵滑道的上端位于投饵口的近旁的正下方,因此,本发明能够保证饵料均匀抛洒在虾塘的食道上,同时也大幅降低了饵料的破碎率。
6.因为本发明的虾塘饵料投食装置的连接组件包括连接架和弹簧缓冲架,连接架的一端安装在饵料箱的底部的外表面,另一端通过弹簧缓冲架与饵料箱的底部的外表面机械连接,因此,本发明连接组件在支撑饵料箱的同时还能缓冲其产生的振动能量,极大降低相关机械零件的损耗速度或者配合失效的可能性,从而大大延长饵料箱的使用寿命,并减少相关机构发出的噪声。
附图说明
图1为本发明的实施例的虾塘饵料投食方法的步骤示意图;
图2为本发明的实施例的虾塘饵料投食装置的结构示意图;
图3为本发明的实施例的投饵单元和连接组件的结构示意图;
图4为本发明的实施例的连接组件的结构示意图;以及
图5为本发明的实施例的投饵单元的结构示意图。
图中:S100、虾塘饵料投食方法,100、虾塘饵料投食装置,A、双体船,A1、船体连接架,10、连接组件,B、连接角铁,11、连接架,12、弹簧缓冲架,121、吸振片,122、吸振弹簧,123、支撑销,20、投饵单元,21、饵料箱,211、饵料箱体,211a、饵料箱底板,211b、投饵口,212、饵料箱盖,22、测距传感器,23、振动马达,24、开放组件,241、电动推杆,242、开放板,30、投饵控制模块,40投饵滑道,41、滑道板。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下实施例结合附图对本发明的一种虾塘饵料投食方法、控制模块及装置作具体阐述,需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
如图1所示,本实施例中的虾塘饵料投食方法S100,用于将预定饵料投放在虾塘内的预定食道上,具体地,投饵通过预定载具完成,且投饵方式采用振动下料投饵,预定载具具有用于容纳预定饵料的饵料箱,饵料箱具有用于投饵的投饵口,在本实施例中,预定食道的轮廓为虾塘的边缘轮廓的相似形,且预定食道与虾塘的边缘轮廓的水平距离处处均匀,例如,若虾塘为矩形,预定食道亦为相似形的矩形,虾塘的轮廓和预定食道的轮廓构成“回”字形,预定载具为具有虾塘投饵控制模块的双体船,饵料箱设置在双体船上,投饵口位于饵料箱的底部端面,饵料箱通过持续振动实现振动下料投饵。
虾塘饵料投食方法S100包括以下步骤:
步骤S1:根据预定食道确定投饵路径。
在本实施例中,投饵路径是指开始投饵至投饵结束的总路径,且与预定食道相同,投饵路径的规划设置通过利用GPS在虾塘投饵控制模块内进行预定载具四点定位实现。
步骤S2:基于投饵路径和预定饵料量确定预期下料投饵速度。
具体地,将投饵路径的长度除以预定载具的行进速度得到下料投饵持续时间,将预定饵料量除以投饵持续时间得到预期下料投饵速度。
在本实施例中,通过将投饵路径的长度、预定载具的速度以及预定饵料量作为输入参数输入虾塘投饵控制模块,虾塘投饵控制模块自动获得预期下料投饵速度,并以此为调整预定载具上的相关机构而进行投饵动作的输入参数,在环境或者预定载具都处于理想状态,即无较大风浪,船体振动较小以及相关机械结构的性能良好时,实时下料投饵速度等于预期下料投饵速度。
步骤S3:监控投饵路径上的实时下料投饵速度与预期下料投饵速度是否相等,若不相等,调节实时下料投饵速度至预定下料投饵速度。
具体地,投饵口通过改变开放大小对实时下料投饵速度进行调节,并且饵料箱具有测距传感器,测距传感器通过实时测量饵料箱内饵料的高度变化实现对实时下料投饵速度的监控,测距传感器为超声波测距传感器。
在本实施例中,实际的环境或者预定载具一般不可能处于理想状态,即实时下料投饵速度会因环境风浪过大、船体振动频繁以及投饵装置的机械误差等因素使得下料投饵速度受到影响而与预期下料投饵速度不一致。
本实施例中的虾塘投饵控制模块,包括处理器、存储器以及存储在存储器上并在处理器上执行的处理程序,当处理器执行处理程序时,虾塘投饵控制模块用于实施本实施例的虾塘饵料投食方法S100。
如图2所示,一种虾塘饵料投食装置100,设置在双体船A上,双体船A即本实施例的虾塘饵料投食方法S100中的预定载具,在本实施例中,双体船A上具有将两个船体安装在一起的船体连接架A,且船体连接架A为两根互相平行的刚性杆。
虾塘饵料投食装置100包括连接组件10、投饵单元20、投饵控制模块30以及投饵滑道40。
如图2-4所示,连接组件10安装在双体船A上,连接组件10包括连接架11和弹簧缓冲架12。
在本实施例中,连接架11为两根互相平行的刚性杆,连接架11的两端分别安装在两个船体连接架A上。
在本实施例中,弹簧缓冲架12安装在连接架11的端部,且弹簧缓冲架12的底部通过连接架11在水平方向上重合安装在船体连接架A其中的一个刚性杆上,弹性缓冲架12由两个吸振片121、两个吸振弹簧122以及两个支撑销123组成,两个吸振片121上下平行设置,较下的吸振片121通过连接架11在水平方向上重合安装在一个刚性杆上,两个支撑销123的上端分别固设较上的吸振片121的两端,下端穿过设置在较下的吸振片121上,两个吸振弹簧122分别套设在两个支撑销123的外部,即两个吸振弹簧122均位于两个吸振片121之间。
如图2-3和图5所示,投饵单元20通过连接组件10设置在双体船A上,投饵单元20包括饵料箱21、测距传感器22、振动马达23以及开放组件24,饵料箱21、测距传感器22为本实施例的虾塘饵料投食方法S100中的饵料箱和测距传感器。
连接架11的一端安装在饵料箱21的底部的外表面,另一端通过弹簧缓冲架12与饵料箱21的底部的外表面机械连接,在本实施例中,在本实施例中,饵料箱21由饵料箱体211和饵料箱盖212组成,连接架11的一端通过连接角铁B安装在饵料箱体211的底部的外表面。
饵料箱21的底部呈斗状结构,最底部具有投饵口211b,在本实施例中,投饵口211b位于饵料箱体211的最低部,饵料箱底板211a的数量为4块,均倾斜朝下设置,共同形成呈斗状的漏出结构。
测距传感器22设置在饵料箱21的内部的顶部上,在本实施例中,测距传感器22的数量为两个,对称地安装在饵料箱盖212朝向饵料箱体211的内部的一侧,用于监控饵料箱体211内的预定饵料的表面至饵料箱盖212的平均直线距离,当预定饵料透过投饵口211b持续脱离饵料箱21,饵料箱体211内的预定饵料的表面会相对于饵料箱盖212不断下降,测距传感器22通过实时测量饵料箱盖212距离饵料箱体211内的饵料表面的距离并转化为信号传递给投饵控制模块30,饵控制模块30再基于该信号得到饵料箱体211内的饵料表面的实时下降速度,从而实现对下料投饵速度的实时监控。
振动马达23设置在饵料箱21内,在本实施例中,振动马达23位于饵料箱体211的内部,并固定安装在一块饵料箱底板211a上。
开放组件24包括电动推杆241和开放板242。
电动推杆241设置在饵料箱21的底部的外表面,在本实施例中,电动推杆241位于饵料箱体211的外部,并固定安装在一块饵料箱底板211a上。
开放板242安装在电动推杆242的活动端,当电动推杆241动作时,开放板242封闭或者开放投饵口211b。
投饵控制模块30为本实施例的虾塘饵料投食方法S100中的虾塘投饵控制模块,在本实施例中,投饵控制模块30安装在双体船A上,投饵控制模块30通过精确控制电动推杆241的活动端的移动距离,从而调整开放板242对投饵口211b的开放程度,进而使得实时下料投饵速度与预定下料投饵速度一致。
投饵滑道40沿与双体船A的行进方向垂直的方向设置且向下倾斜,并且投饵滑道40的上端位于投饵口211b的近旁的正下方,在本实施例中,投饵滑道40安装在船体连接架A1上,投饵滑道40由两块对称且邻接的滑道板41组成,两块滑道板41的设置方式呈等腰三角形的两个腰边的设置方式,由投饵口211b落下的预定饵料通过投饵滑道40由两侧均匀地抛洒在虾塘内的预定食道上,并且投饵滑道40的设置也大幅降低了预定饵料的破碎率。
上述实施方式为本发明的优选案例,并不用来限制本发明的保护范围,本领域普通技术人员在所附权利要求范围内不需要创造性劳动就能做出的各种变形或修改仍属本专利的保护范围。
- 一种虾塘饵料投食方法、控制模块及装置
- 一种稻田甲鱼的饵料投食装置