一种竖直旋转式搂草机
文献发布时间:2023-06-19 12:16:29
技术领域
本发明涉及农用机械领域,尤其涉及一种竖直旋转式搂草机。
背景技术
随着我国畜牧业的大力发展,牧草、秸秆的收集显得尤为重要,尤其是一些草原上牧草的大面积集中的种植,对牧草收货机械提出更高的要求。现有的搂草机大部分没有地面仿形装置,地面的起伏不平会严重影响搂草的效果,现有搂草机弹齿与牧草之间的相对速度很难固定,速度过快会导致牧草营养成分的损失,过慢则会影响弹齿与牧草间的约束力,产生漏搂现象。
发明内容
本发明的目的是提供一种竖直旋转式搂草机,解决现有搂草机没有地面仿形装置,弹齿与牧草之间的相对速度很难固定,容易发生漏搂现象的问题。
为解决上述技术问题,本发明采用如下技术方案:
本发明一种竖直旋转式搂草机,包括牵引机架,所述牵引机架包括纵梁、前横梁和后横梁,所述前横梁设置在所述纵梁的中部,所述后横梁设置在所述纵梁的后端,所述纵梁的前端设置有与动力机车连接用的牵引环,所述纵梁与所述前横梁之间设置有动力传输机构,所述牵引机架的左右两侧对称连接有弹齿回转机构,所述动力传输机构与所述弹齿回转机构传动连接并驱动所述弹齿回转机构旋转作业;所述前横梁的左右两侧通过前连接梁和第一连接架连接有万向轮,所述后横梁的左右两侧通过后连接梁和第二连接架连接有行走轮,所述弹齿回转机构的两端定位连接在所述前连接梁、后连接梁上。
进一步的,所述动力传输机构包括设置于所述前横梁前端的齿轮箱,所述齿轮箱的前端设置有动力输入轴,所述动力输入轴通过花键与拖拉机动力输出轴连接,所述齿轮箱的左右两侧设置有传动轴,所述传动轴通过万向联轴器与所述弹齿回转机构传动连接。
再进一步的,两个所述弹齿回转机构呈V字形布置。
再进一步的,所述前连接梁可拆卸的连接在所述前横梁的左右两侧,所述第一连接架垂直连接在所述前连接梁的端部,所述第一连接架的底部通过螺栓组件连接有所述万向轮;所述后连接梁设置在所述后横梁的左右两侧,所述第二连接架垂直连接在所述后连接梁的端部,所述第二连接架的底部通过螺栓组件连接有所述行走轮。
再进一步的,同一侧的所述前连接梁和所述后连接梁平行布置,所述前连接梁与所述前横梁呈一定角度布置,所述后连接梁与所述后横梁呈一定角度布置。
再进一步的,所述弹齿回转机构包括转动安装在机架上的回转主动轮和回转从动轮,所述回转主动轮和所述回转从动轮之间设置有传动链,所述传动链上均匀设置有若干弹齿臂,所述弹齿臂上设置有弹齿,所述回转主动轮的中心轴上靠近所述纵梁的一侧安装有大V带轮,所述机架上靠近所述大V带轮的一端转动安装有小V带轮,所述小V带轮与所述万向联轴器连接,所述大V带轮和所述小V带轮之间设置有V带。
再进一步的,所述回转主动轮和所述回转从动轮的轮面上等间隔的设置有若干长方形凸起,所述长方形凸起带动所述传动链运动。
再进一步的,所述弹齿臂设置为工字形,所述弹齿臂的底部安装在所述传动链上,所述弹齿臂的顶部安装有所述弹齿。
与现有技术相比,本发明的有益技术效果:
本发明一种竖直旋转式搂草机,包括牵引机架,牵引机架包括纵梁、前横梁和后横梁,前横梁设置在纵梁的中部,后横梁设置在纵梁的后端,纵梁的前端设置有牵引环,纵梁与前横梁之间设置有动力传输机构,牵引机架的左右两侧对称连接有弹齿回转机构,动力传输机构与弹齿回转机构传动连接并驱动弹齿回转机构旋转作业;前横梁的左右两侧通过前连接梁和第一连接架连接有万向轮,后横梁的左右两侧通过后连接梁和第二连接架连接有行走轮,弹齿回转机构的两端定位连接在前连接梁、后连接梁上;本发明便于控制搂草机工作时弹齿相对于牧草的速度,保证既不因相对速度过低导致漏搂,也不因相对速度过大破坏牧草中的营养成分;弹齿工作时运动方向与拖拉机牵引运动方向相反,在拖拉机向前运动较快时,通过提高弹齿的回转速度,也能控制弹齿与牧草之间的相对速度在合理范围内,只要拖拉机动力足够,搂草机便可以较快速的前进,大大提高工作效率。
附图说明
下面结合附图说明对本发明作进一步说明。
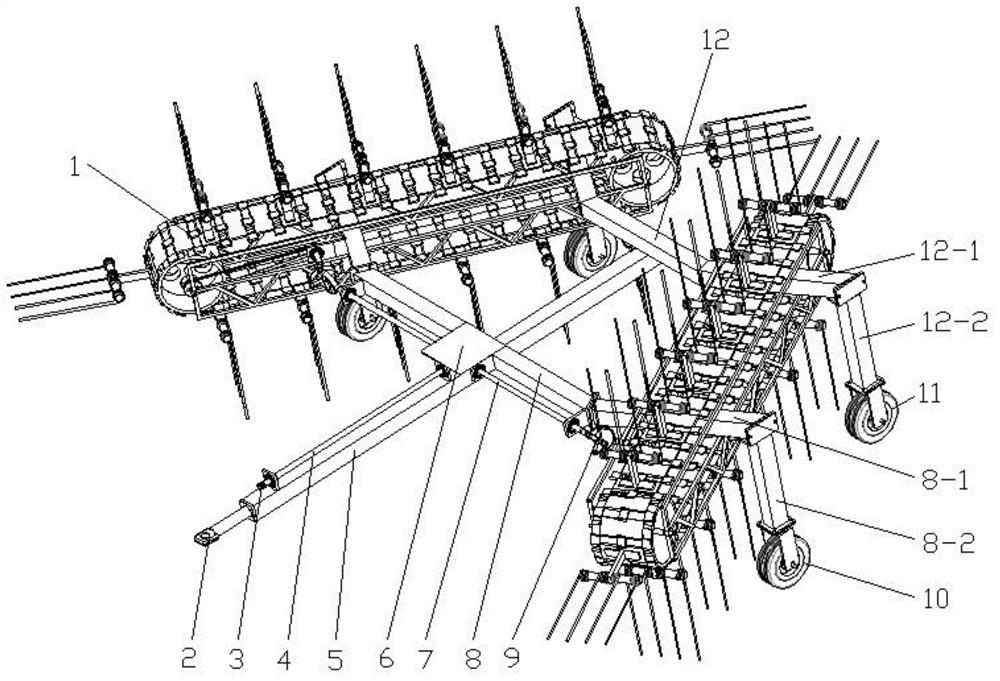
图1为本发明竖直旋转式搂草机结构示意图;
图2为本发明弹齿回转机构结构示意图;
图3为本发明A处放大图;
附图标记说明:1、弹齿回转机构;2、牵引环;3、花键;4、动力输入轴;5、纵梁;6、齿轮箱;7、传动轴;8、前横梁;9、万向联轴器;10、万向轮;11、行走轮;12、后横梁;1-1、弹齿;1-2、弹齿臂;1-3、大V带轮;1-4、回转主动轮;1-5、V带;1-6、小V带轮;1-7、回转从动轮;1-8、传动链;1-9、机架;1-10、长方形凸起;8-1、前连接梁;8-2、第一连接架;12-1、后连接梁;12-2、第二连接架。
具体实施方式
如图1-3所示,一种竖直旋转式搂草机,包括牵引机架,所述牵引机架包括纵梁5、前横梁8和后横梁12,所述前横梁8焊接在所述纵梁5的中部,所述后横梁12焊接在所述纵梁5的后端,所述纵梁5的前端焊接有与动力机车连接用的牵引环2,所述纵梁5与所述前横梁8之间设置有动力传输机构,所述牵引机架的左右两侧对称连接有弹齿回转机构1,所述动力传输机构与所述弹齿回转机构1传动连接并驱动所述弹齿回转机构1旋转作业;所述前横梁8的左右两侧通过前连接梁8-1和第一连接架8-2连接有万向轮10,所述后横梁12的左右两侧通过后连接梁12-1和第二连接架12-2连接有行走轮11,所述弹齿回转机构1的两端定位连接在所述前连接梁8-1、后连接梁12-1上;本发明弹齿回转机构1呈V字形布置,工作时弹齿1-1的运动方向与拖拉机的运动方向角度固定,便于控制搂草机工作时弹齿1-1相对于牧草的速度,保证既不因相对速度过低导致漏搂,也不因相对速度过大破坏牧草中的营养成分;弹齿1-1工作时运动方向与拖拉机牵引运动方向相反,在拖拉机向前运动较快时,通过提高弹齿1-1的回转速度,也能控制弹齿1-1与牧草之间的相对速度在合理范围内,只要拖拉机动力足够,搂草机便可以较快速的前进,大大提高工作效率。
具体来说,所述动力传输机构包括设置于所述前横梁8前端的齿轮箱6,所述齿轮箱6的前端设置有动力输入轴4,所述动力输入轴4通过花键3与拖拉机动力输出轴连接,所述齿轮箱6的左右两侧连接有传动轴7,所述传动轴7通过万向联轴器9与所述弹齿回转机构1传动连接。
两个所述弹齿回转机构1呈V字形布置。
所述前连接梁8-1可拆卸的连接在所述前横梁8的左右两侧,所述第一连接架8-2垂直连接在所述前连接梁8-1的端部,所述第一连接架8-2的底部通过螺栓组件连接有所述万向轮10;所述后连接梁12-1设置在所述后横梁12的左右两侧,所述第二连接架12-2垂直连接在所述后连接梁12-1的端部,所述第二连接架12-2的底部通过螺栓组件连接有所述行走轮11。
同一侧的所述前连接梁8-1和所述后连接梁12-1平行布置,所述前连接梁8-1与所述前横梁8呈一定角度布置,所述后连接梁12-1与所述后横梁12呈一定角度布置;具体的,所述前连接梁8-1与所述前横梁8之间的夹角优选150°,所述后连接梁12-1与所述后横梁12之间的夹角优选150°。
如图2所示,所述弹齿回转机构1包括转动安装在机架1-9上的回转主动轮1-4和回转从动轮1-7,所述回转主动轮1-4和所述回转从动轮1-7之间设置有传动链1-8,所述传动链1-8上均匀设置有若干弹齿臂1-2,所述弹齿臂1-2上设置有弹齿1-1,所述回转主动轮1-4的中心轴上靠近所述纵梁5的一侧安装有大V带轮1-3,所述机架1-9上靠近所述大V带轮1-3的一端转动安装有小V带轮1-6,所述小V带轮1-6与所述万向联轴器9连接,所述大V带轮1-3和所述小V带轮1-6之间设置有V带1-5。
所述回转主动轮1-4和所述回转从动轮1-7的轮面上等间隔的设置有若干长方形凸起1-10,所述长方形凸起1-10带动所述传动链1-8运动。
所述弹齿臂1-2设置为工字形,所述弹齿臂1-2的底部安装在所述传动链1-8上,所述弹齿臂1-2的顶部安装有所述弹齿1-1。
本发明的使用过程如下:
步骤一,将弹齿回转机构1的后端安装在后连接梁12-1上;步骤二,前连接梁8-1安装在弹齿回转机构1的前端;步骤三,将前连接梁8-1通过螺栓安装在前横梁8上;步骤四,将第一连接架8-2通过螺栓安装在前连接梁8-1的端部,将第二连接架12-2通过螺栓安装在后连接梁12-1的端部;步骤五,将万向轮10通过螺栓安装在第一连接架8-2的底部,将行走轮11通过螺栓安装在第二连接架12-2的底部;步骤六,按照上述步骤安装另一侧的弹齿回转机构1,从而完成搂草机的安装;步骤七,将牵引环2连接在拖拉机上,通过花键3将动力输入轴4与拖拉机动力输出轴连接在一起,并将万向联轴器9与小V带轮1-6连接在一起;步骤八,启动拖拉机,拖拉机带动搂草机向前运动,拖拉机动力输出轴将动力输送至动力输入轴4,动力通过动力输入轴4传送至齿轮箱6,齿轮箱6将动力传递到传动轴7,传动轴7带动万向联轴器9转动,万向联轴器9带动小V带轮1-6转动,小V带轮1-6通过V带1-5带动大V带轮1-3转动,由于大V带轮1-3与回转主动轮1-4安装在同一转轴上,大V带轮1-3转动带动回转主动轮1-4转动,回转主动轮1-4通过传动链1-8带动回转从动轮1-7转动,弹齿1-1随着传动链1-8向后转动,从而带动牧草向搂草机正后方运动,形成完整的草条。
以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 一种竖直旋转式搂草机
- 一种旋转式搂草机搂草弹簧连杆稳定连接机构