职住信息确定方法、装置、设备及存储介质
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及数据挖掘技术领域,尤其涉及一种职住信息确定方法、装置、计算机设备和存储介质。
背景技术
作为所辖区域政治、经济、文化的研究中心,城市的职住空间分布一直是城市规划中无法绕开的课题。传统的城市规划中多利用交通出行相关数据作为基础,基于居民出行、年龄等基础数据的常用调查方式是问卷调查,普遍存在周期长、抽样率低、费时费力等问题。随着科技发展,智能手机占比不断提高,手机上网已经是人们日常生活的一部分,手机信令数据激增。而用手机信令数据分析城市交通运行特征,用户出行等特征弥补了传统的交通调查周期长,工作量大,样本量少,花费高的特点,给交通规划和交通运营部门提供可靠依据。但是,手机信令数据的定位精度对于职住空间的分析影响很大,随着相关研究的深入,常规的手机信令数据在位置精度方面已经无法满足需求。
发明内容
有鉴于此,本发明提供了一种职住信息确定方法、装置、设备及存储介质,通过指纹定位回填了经纬度信息,将指纹定位数据与手机信令数据关联回填用户信息,实现了高精度的职住信息确定。
第一方面,本发明提供了一种职住信息确定方法,该方法包括:
获取用户的时空数据,所述时空数据包括用户的指纹定位数据和用户的身份数据;
根据所述时空数据提取驻留点信息;
根据所述驻留点信息通过预设规则确定职住点信息;
根据所述职住点信息确定用户的职住信息。
可选的,在一些实施例中,所述获取用户的移动数据包括:
获取用户的指纹定位数据和关联的信令数据,所述信令数据包括用户的身份数据;
对所述指纹定位数据和关联的信令数据进行数据预处理得到用户的时空数据。
可选的,在一些实施例中,所述数据预处理包括缺失数据清洗、漂移数据处理和乒乓数据处理中的至少一种。
可选的,在一些实施例中,所述根据所述时空数据提取驻留点信息包括:
根据所述时空数据通过聚类算法确定簇内中心点以及对应的聚合时间,以所述簇内中心地点为驻留点得到驻留点信息;
所述根据所述驻留点信息通过预设规则确定职住点信息包括:
根据所述驻留点信息以时间为标准筛选确定职驻点信息。
可选的,在一些实施例中,所述根据所述驻留点信息以时间为标准筛选确定职驻点信息包括:
根据所述驻留点信息按照时间分布确定工作点和居住点得到每日职住点;
基于所述每日职住点结合预设的小区信息码表通过电子围栏算法确定每日职住信息;
基于所述每日职住信息匹配用户职住中间表以更新得到新的用户职住中间表,所述用户职住中间表用于记录用户的职住点信息。
可选的,在一些实施例中,所述基于所述每日职住信息匹配用户职住中间表以更新得到新的用户职住中间表包括:
将所述每日职住信息与所述用户职住表中的职住点信息匹配进行日期更新和权重更新;
合并相同小区内经纬度和权重得到更新后的用户职住表。
可选的,在一些实施例中,
第二方面,本发明提供了一种职住信息确定装置,包括:
数据获取模块,用于获取用户的时空数据,所述时空数据包括指纹定位数据和身份数据;
驻留点信息提取模块,用于根据所述时空数据提取驻留点信息;
职住点确定模块,用于根据所述驻留点信息通过预设规则确定职住点信息;
职住信息确定模块,用于根据所述职住点信息确定用户的职住信息。
第三方面,本发明提供了一种计算机设备,包括存储器和处理器,所述存储器上存储有可在处理器运行的计算机程序,所述处理器执行所述计算机程序时实现如前述的职住信息确定方法。
第四方面,本发明提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被执行时实现前述的职住信息确定方法。
本发明提供的职住信息确定方法,通过指纹定位数据和用户的身份数据得到用户的时空数据,根据时空数据聚类得到驻留点信息,再根据驻留点信息分析得到用户的职驻点信息,最后对职驻点信息统筹形成用户的职住信息,该方法摆脱了传统方法仅根据信令数据分析的低精度问题,以高精度的指纹定位数据结合信令数据形成时空数据,为相关部门提供便捷的人口监测,管理和决策支持。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见的,下面描述中的附图仅仅是本申请的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
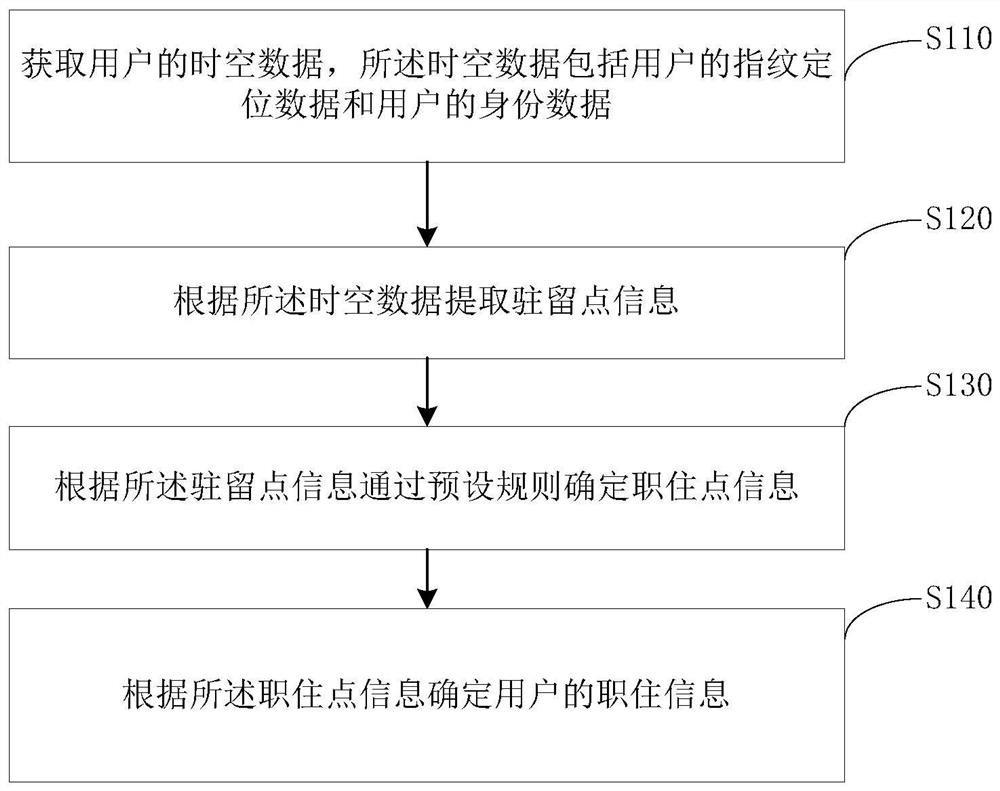
图1是本发明实施例一提供的一种职住信息确定方法的流程图;
图2是本发明实施例一提供的职住信息确定方法的子流程图;
图3是本发明实施例二提供的职住信息确定方法的流程图;
图4是本发明实施例二提供的职住信息确定方法的子流程图;
图5是本发明实施例三提供的一种职住信息确定装置的结构示意图;
图6是本发明实施例四提供的一种计算机设备的结构示意图。
具体实施方式
下面结合本申请实施例中的附图,对本申请实施中的技术方案进行清楚、完整的描述。可以理解的是,此处所描述的具体实施例仅仅是本申请一部分实施例,而不是全部的实施例,仅用于解释本申请,而非对本申请的限定。另外还需要说明的是,基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
此外,术语“第一”、“第二”等可在本文中用于描述各种方向、动作、步骤或元件等,但这些方向、动作、步骤或元件不受这些术语限制。这些术语仅用于将第一个方向、动作、步骤或元件与另一个方向、动作、步骤或元件区分。举例来说,在不脱离本发明的范围的情况下,可以将第一用例称为第二用例,且类似地,可将第二用例称为第一用例。第一用例和第二用例两者都是用例,但其不是同一用例。术语“第一”、“第二”等而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个特征的组合。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。需要说明的是,当一个部被称为“固定于”另一个部,它可以直接在另一个部上也可以存在居中的部。当一个部被认为是“连接”到另一个部,它可以是直接连接到另一个部或者可能同时存在居中部。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述,只是为了说明的目的,并不表示是唯一的实施方式。
在更加详细地讨论示例性实施例之前应当提到的是,一些示例性实施例被描述成作为流程图描绘的处理或方法。虽然流程图将各步骤描述成顺序的处理,但是其中的许多步骤可以被并行地、并发地或者同时实施。此外,各步骤的顺序可以被重新安排。当其操作完成时处理可以被终止,但是还可以具有未包括在附图中的附加步骤。处理可以对应于方法、函数、规程、子例程、子程序等等。
实施例一
参见图1,本实施例提供了一种职住信息确定方法,可以应用于职住信息分析系统,该系统包括终端和服务器,其中终端与服务器通过网络进行通信,终端可以但不限于是各种智能手机、平板电脑和便携式可穿戴设备,服务器可以用独立的服务器或者是多个服务器组成的服务器集群来实现。基于上述系统,职住信息确定方法可以由终端或服务器执行,也可以通过终端与服务器的交互实现。如图1所示,该方法具体包括:
S110、获取用户的时空数据,所述时空数据包括用户的指纹定位数据和用户的身份数据。
时空数据用于描述用户的所处的位置以及对应的时间,由终端采集。具体的,在本实施例中,时空数据由终端的指纹定位数据和信令数据生成,用于弥补仅根据信令数据分析职住信息时的局限。信令数据由不同通信设备之间的接口上传递控制信息时生成。指纹定位数据实际上是无线信号特征数据,是代表某一位置的唯一特征信息,在终端定位时,根据指纹定位数据与指纹库中的指纹位置特征数据匹配即可确定终端的位置。
具体的,如图2所示,本实施例中,步骤S110,即所述获取用户的移动数据的过程,包括步骤S111-112:
S111、获取用户的指纹定位数据和关联的信令数据,所述信令数据包括用户的身份数据。
指纹定位数据往往是仅用于进行定位,对于用户的身份信息涉及较少,而职住信息需要对用户的生活工作进行较为深度的挖掘,因此需要依赖信令数据。也即,本实施例中通过指纹定位数据回填了终端的MR(Measurement Report,测量报告)经纬度信息(位置信息),将指纹定位数据与信令数据关联是将信令数据中的用户身份信息回填,即将身份信息和位置信息关联。
S112、对所述指纹定位数据和关联的信令数据进行数据预处理得到用户的时空数据。
具体的,本实施例中的数据预处理包括缺失数据清洗、漂移数据处理和乒乓数据处理中的至少一种。其中,缺失数据清洗包括对经纬度、用户ID、时间等信息进行确认,如果存在数据缺失,则需要删除缺少的数据以及对应需要作废的数据;采用选取按时间排序的连续样本(p1,p2,p3)作漂移数据判断示例,判断条件有三个:p1和p2之间距离d(p1,p2)远大于p1和p3之间距离d(p1,p3),同时p1和p2之间速度v(p1,p2)远大于p1和p3之间速度v(p1,p3),同时p2和p3之间速度v(p2,p3)远大于p1和p3之间速度v(p1,p3),此处所指的远大于至少为大于一个数量级,当满足上述三个条件判断不是漂移数据,否则判断这三个样本出现了漂移数据;对于乒乓数据处理,以三点乒乓数据为例,选取按时间排序的连续样本(p1,p2,p3),判断条件有两个:p1和p3之间距离d(p1,p3)小于预设最小距离dmin,p1和p3之间时间间隔t(p1,p3)小于预设最小时差tmin,若是则将二者数据合并。
S120、根据所述时空数据提取驻留点信息。
本实施例中,驻留点信息用于描述用户驻留的位置坐标以及对应的时间。驻留点信息通过对时空数据挖掘得到,前文体已经提到将指纹定位数据和信令数据关联得到时空数据,时空数据反映的是用户的移动点轨迹,而本实施例需要挖掘的是用户的职住信息,而职住信息挖掘的是用户居住和工作信息,对于移动过程关注程度较低,因此需要关注与用户停留时间较长的地点,也即用户驻留的地方,即驻留点。本实施例中,采用聚类算法对步骤S110中得到的时空数据进行聚类,发掘出用户驻留的地点,得到驻留点信息。
S130、根据所述驻留点信息通过预设规则确定职住点信息。
职驻点信息用于将步骤S120中得到的驻留点筛选确定用户的职驻点,以得到用户的工作点或居住点。
具体的,本实施例中在得到驻留点信息后,进一步根据地点所处的环境(是居住区还是商业区)以及时间(是工作时间还是休息时间)等对驻留点进行筛选、标记得到职驻点信息。
S140、根据所述职住点信息确定用户的职住信息。
步骤S130已经得到了初步标记好的职驻点信息,但是这些数据仍然是离散的,并不能完整反映用户的生活和工作情况,因此步骤S140将职驻点信息进行统一处理归纳形成能够描述用户生活和工作情况的职住信息。具体的,步骤S140通过职驻点信息形成用户的职住信息表,并且,随着职驻点信息的更新,职住信息表也不断更新。
本实施例提供了一种职住信息确定方法,通过指纹定位数据和用户的身份数据得到用户的时空数据,根据时空数据聚类得到驻留点信息,再根据驻留点信息分析得到用户的职驻点信息,最后对职驻点信息统筹形成用户的职住信息,该方法摆脱了传统方法仅根据信令数据分析的低精度问题,以高精度的指纹定位数据结合信令数据形成时空数据,为相关部门提供便捷的人口监测,管理和决策支持。
实施例二
实施例二提供了一种职住信息确定方法,其可以在实施例一的基础上实现,对实施例一中的内容进行了进一步补充,具体包括:
如图3所示,本实施例提供的职住信息确定方法中,根据所述时空数据提取驻留点信息具体包括根据所述时空数据通过聚类算法确定簇内中心点以及对应的聚合时间,以所述簇内中心地点为驻留点得到驻留点信息,根据所述驻留点信息通过预设规则确定职住点信息具体包括根据所述驻留点信息以时间为标准筛选确定职驻点信息:
S210、获取用户的时空数据,所述时空数据包括用户的指纹定位数据和用户的身份数据。
S220、根据所述时空数据通过聚类算法确定簇内中心点以及对应的聚合时间,以所述簇内中心地点为驻留点得到驻留点信息。
本实施例中采用的聚类算法为时空DBSCAN聚类,其伪代码为:
输入:数据源D
Eps空间半径R,时间阈值t
核心对象判定阈值MinPts
输出:聚类生成的目标类簇
方法:foreach未被标记的对象p in数据源D
if(p的Eps领域内点的数量 标记p为噪声对象 else 建立新簇,找出所有与p密度相连的对象并加入新簇 找出新簇内所有核心对象的密度相连对象并加入新簇 标记新簇内的所有对象 end if end for。 该算法具体介绍如下: 核心样本:样本对象x,满足空间半径 首选任意选取一个点,然后选取满足eps的所有的点。如果数据点个数小于min_samples,那么这个点被标记为噪声。如果数据点个数大于min_samples,则这个点被标记为核心样本,并被分配一个新的簇标签。 然后访问该点的所有邻居(在距离eps以内)。如果它们还没有被分配一个簇,那么就将刚刚创建的新的簇标签分配给它们。如果它们是核心样本,那么就依次访问其邻居,以此类推。簇逐渐增大,直到在簇的eps距离内没有更多的核心样本为止。 选取另一个尚未被访问过的点,并重复相同的过程,直到所有点均被访问。 S230、根据所述驻留点信息以时间为标准筛选确定职驻点信息。 以时间为标准筛选职驻点信息主要是根据工作时间和夜间休息时间以及工作日和非工作日等划分标准对驻留点进行筛选,例如筛选夜间休息时间占比最高的驻留点和工作时间占比最高的驻留点作为职驻点。当然实际过程更为复杂,可选的,在一些实施例中,如图4所示,包括: S231、根据所述驻留点信息按照时间分布确定工作点和居住点得到每日职住点。 步骤S231即如上述的对驻留点按照时间占比进行筛选,具体到某一天的驻留点筛选规则如下:筛选包含夜间休息时间的驻留点,按驻留点夜间休息时间占比排序,取排序第一的驻留点为当日的居住点;判断是否为工作日,若是则筛选包含工作时间的驻留点,按驻留点工作时间占比排序,取排序第一的驻留点为当日的工作点。即步骤S231得到用户的每日职驻点。 S232、基于所述每日职住点结合预设的小区信息码表通过电子围栏算法确定每日职住信息。 电子围栏算法原理: 电子围栏判定方法使用射线法进行判定,以判定点为基点,水平向左画射线,判断与各边是否有焦点。如果射线与该多边形的焦点个数为奇数,则该点在此多边形内,否则该点在此多边形外。该算法中存在特殊点需要特殊处理:1.边界上的点如果用射线法判定,右侧边界上的点符合判定规则,上下定点和左侧边界上的点则不在判定规则中,所以要对此类边界点进行特殊处理判定。2.当射线与多边形上下相切,既纵坐标等于多边形上下顶点且不在顶点上时,其判定规则也会失效,故此类点也需要单独进行判定处理。步骤S232确定的用户每日职住信息为职驻点标记了对应的小区信息。 S233、基于所述每日职住信息匹配用户职住中间表以更新得到新的用户职住中间表,所述用户职住中间表用于记录用户的职住点信息。 步骤S233实际是根据用户的每日职住信息对用户的职住中间表进行更新的过程,职住中间表中为不同的小区分配有权重,权重用于在最后生成永恒职住表时使用,在不断地更新职住中间表时,使用牛顿冷却公式进行权重更新:为最新的每日职住信息分配权重,初始权重为100,与用户职住中间表匹配,采用牛顿冷却公式更新权重,根据日期进行日期变更。 这一过程实际与遗忘算法原理相同,遗忘算法依据艾宾浩斯遗忘曲线进行建模,采用牛顿冷却公式来代替遗忘曲线。 R=R_0e^(-a(t-t_0)) R为当前权重剩余量 R_0:为最后一次权重 e:为自然底数 a:为遗忘系数 t:当前时间 t_0:最后一次入库时间。 算法介绍: 采用冷却公式对之前权重进行更新,然后和新来数据权重对比,按权重排序,对权重小于阈值权重过滤,达到遗忘的目的。 具体的, 更具体的,在一些实施例中,步骤S233还包括步骤S2331-2332(图未示): S2331、将所述每日职住信息与所述用户职住表中的职住点信息匹配进行日期更新和权重更新。 S2332、合并相同小区内经纬度和权重得到更新后的用户职住表。 S240、根据所述职住点信息确定用户的职住信息。 步骤S240中实际是根据步骤S230中得到的职住中间表按照用户进行信息整合,以权重为依据进行排序,选择权重最高的小区作为用户的居住小区/工作小区从而生成用户的职住信息。 本实施例提供的一种职住信息确定方法,进一步提供了筛选确定职驻点信息的具体过程,以及以职住中间表生成职住信息的过程。 实施例三 图4为本发明实施例三提供的一种职住信息确定装置300的结构示意图,如图4所述,该装置300包括: 数据获取模块310,用于获取用户的时空数据,所述时空数据包括指纹定位数据和身份数据; 驻留点信息提取模块320,用于根据所述时空数据提取驻留点信息; 职住点确定模块330,用于根据所述驻留点信息通过预设规则确定职住点信息; 职住信息确定模块340,用于根据所述职住点信息确定用户的职住信息。 可选的,在一些实施例中,所述数据获取模块310具体用于: 获取用户的指纹定位数据和关联的信令数据,所述信令数据包括用户的身份数据; 对所述指纹定位数据和关联的信令数据进行数据预处理得到用户的时空数据。 可选的,在一些实施例中,所述数据预处理包括缺失数据清洗、漂移数据处理和乒乓数据处理中的至少一种。 可选的,在一些实施例中,所述驻留点信息提取模块用于: 用于根据所述时空数据通过聚类算法确定簇内中心点以及对应的聚合时间,以所述簇内中心地点为驻留点得到驻留点信息; 所述职住点确定模块用于: 根据所述驻留点信息以时间为标准筛选确定职驻点信息。 可选的,在一些实施例中,所述根据所述驻留点信息以时间为标准筛选确定职驻点信息包括: 根据所述驻留点信息按照时间分布确定工作点和居住点得到每日职住点; 基于所述每日职住点结合预设的小区信息码表通过电子围栏算法确定每日职住信息; 基于所述每日职住信息匹配用户职住中间表以更新得到新的用户职住中间表,所述用户职住中间表用于记录用户的职住点信息。 可选的,在一些实施例中,所述基于所述每日职住信息匹配用户职住中间表以更新得到新的用户职住中间表包括: 将所述每日职住信息与所述用户职住表中的职住点信息匹配进行日期更新和权重更新; 合并相同小区内经纬度和权重得到更新后的用户职住表。 本实施例提供了一种职住信息确定装置,摆脱了传统方法仅根据信令数据分析的低精度问题,以高精度的指纹定位数据结合信令数据形成时空数据,为相关部门提供便捷的人口监测,管理和决策支持。 实施例四 图5为本发明实施例四提供的一种计算机设备400的结构示意图,如图5所示,该设备包括存储器410、处理器420,设备中处理器420的数量可以是一个或多个,图5中以一个处理器420为例;设备中的存储器410、处理器420可以通过总线或其他方式连接,图5中以通过总线连接为例。 存储器410作为一种计算机可读存储介质,可用于存储软件程序、计算机可执行程序以及模块,如本发明实施例中的职住信息确定方法对应的程序指令/模块(例如,职住信息确定装置中的数据获取模块310、驻留点信息提取模块320、职住点确定模块330和职住信息确定模块340)。处理器420通过运行存储在存储器410中的软件程序、指令以及模块,从而执行计算机设备的各种功能应用以及数据处理,即实现上述的职住信息确定方法。 其中,所述处理器420用于运行存储在存储器410中的计算机可执行程序,以实现如下步骤:步骤S110、获取用户的时空数据,所述时空数据包括指纹定位数据和身份数据;步骤S120、根据所述时空数据提取驻留点信息;步骤S130、根据所述驻留点信息通过预设规则确定职住点信息;步骤S140、根据所述职住点信息确定用户的职住信息。 当然,本发明实施例所提供的一种计算机设备,该设备不限于如上所述的方法操作,还可以执行本发明实施例任意实施例所提供的职住信息确定方法中的相关操作。 存储器410可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作装置、至少一个功能所需的应用程序;存储数据区可存储根据终端的使用所创建的数据等。此外,存储器410可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实例中,存储器410可进一步包括相对于处理器420远程设置的存储器,这些远程存储器可以通过网络连接至设备。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。 本实施例提供了一种计算机设备,摆脱了传统方法仅根据信令数据分析的低精度问题,以高精度的指纹定位数据结合信令数据形成时空数据,为相关部门提供便捷的人口监测,管理和决策支持。 实施例五 本发明实施例五还提供一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行一种职住信息确定方法,该职住信息确定方法包括: 获取用户的时空数据,所述时空数据包括用户的指纹定位数据和用户的身份数据; 根据所述时空数据提取驻留点信息; 根据所述驻留点信息通过预设规则确定职住点信息; 根据所述职住点信息确定用户的职住信息。 通过以上关于实施方式的描述,所述领域的技术人员可以清楚地了解到,本发明可借助软件及必需的通用硬件来实现,当然也可以通过硬件实现,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如计算机的软盘、只读存储器(Read-Only Memory,ROM)、随机存取存储器(RandomAccess Memory,RAM)、闪存(FLASH)、硬盘或光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,设备,或者网络设备等)执行本发明各个实施例所述的方法。 值得注意的是,上述授权装置的实施例中,所包括的各个单元和模块只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。 注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 职住信息确定方法、装置、设备及存储介质
- 职住空间分析方法、装置、电子设备及可读存储介质