一种市政工程用的防撞反射镜
文献发布时间:2023-06-19 12:18:04
技术领域
本发明属于路角反射镜领域,尤其涉及一种市政工程用的防撞反射镜。
背景技术
道路反光镜也叫广角镜、凸面镜、转弯镜主要用于各种弯道、路口,可以扩大司机视野,及早发现弯道对面车辆及行人,以减少交通事故的发生;也用于超市防盗,监视死角。当反光镜所在的竖杆遭到车辆猛烈碰撞后会发生倾斜并发生位置改变,由于反光镜位置改变导致其对弯道路口的监视功能失效。在反光镜所在竖杆发生倾斜而不能得到及时维修的这段时间,很可能会发生事故,导致人员伤亡。
为了解决因安装反光镜的竖杆被撞而导致反光镜不能继续进行有效工作的问题,有必要设计一种在反光镜所在竖杆被撞发生倾斜情况下依然可以对弯道或路口进行正常监视的道路反光镜装置。
本发明设计一种市政工程用的防撞反射镜解决如上问题。
发明内容
为解决现有技术中的上述缺陷,本发明公开一种市政工程用的防撞反射镜,它是采用以下技术方案来实现的。
在本发明的描述中需要说明的是,术语“内”、“外”、“上”、“下”等指示方位或者位置关系为基于附图所示的方位或者位置关系,或者是该发明产品使用时惯常摆放的方位或者位置关系,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造或操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
一种市政工程用的防撞反射镜,其特征在于:它包括法兰、万向节机构A、衬垫、竖杆、万向节机构B、凸面镜,其中万向节机构A安装于固定在地面的法兰上;法兰上安装有暂时限制万向节机构A中若干自由度的衬垫,衬垫在强力挤压下会发生碎裂;万向节机构A的上端安装有中空的竖杆,竖杆顶端安装有万向节机构B,万向节机构B上安装有凸面镜;竖杆内具有限制万向节机构B内若干自由度的结构;万向节机构A与竖杆内旋转配合的水平轴G传动连接;轴G的旋转会通过一系列传动暂时解除万向节机构B内若干自由度受到的限制,此时凸面镜在自重作用下进行竖直方向和水平方向的自适应平移;待轴G旋转停止后,万向节机构B内的若干自由度逐渐恢复被限制的状态。
上述万向节机构A包括壳体、中环、轴A、轴套、中柱、轴B、直齿轮A、齿环、轴C、直齿轮B、锥齿轮A、圆筒、轴D、锥齿轮B、锥齿轮C、轴E、支座A,其中位于壳体内的中环外侧安装有同中心轴线的轴套和轴A,轴A和轴套与壳体旋转配合;位于中环内的中柱上对称安装有两个同中心轴线的轴B,两个轴B与中环旋转配合;中柱下端与法兰固连;轴B中心轴线垂直相交于轴A中心轴线;一个轴B上安装有直齿轮A,直齿轮A与旋转于中环内壁的齿环啮合;轴套中旋转配合有轴C,轴C两端分别安装有锥齿轮A和与齿环啮合的直齿轮B;轴套末端安装有同中心轴线的圆筒;圆筒内柱面上对称安装有两个轴D,每个轴D上均安装有与锥齿轮A啮合的锥齿轮B;安装在壳体外侧的U型支座A上旋转配合有与轴G传动连接的轴E,轴E上安装有与两个锥齿轮B啮合的锥齿轮C。
作为本技术的进一步改进,上述万向节机构B包括壳体、中环、轴A、轴套、中柱、轴B、直齿轮A、齿环、轴C、直齿轮B,其中位于壳体内的中环外侧安装有同中心轴线的轴套和轴A,轴A和轴套与壳体旋转配合;位于中环内的中柱上对称安装有两个同中心轴线的轴B,两个轴B与中环旋转配合;轴B中心轴线垂直相交于轴A中心轴线;一个轴B上安装有直齿轮A,直齿轮A与旋转于中环内壁的齿环啮合;轴套中旋转配合有轴C,轴C一端安装有与齿环啮合的直齿轮B;壳体安装在竖杆顶端,中柱竖直下垂;凸面镜安装在中柱的下端。
作为本技术的进一步改进,上述万向节机构A和万向节机构B中的齿环外柱面均安装有同中心轴线的梯形导环,梯形导环旋转滑动于相应中环内壁上的梯形环槽内。梯形导环与梯形环槽的配合对齿环在相应中环内的周向运动发挥定位导向作用。
作为本技术的进一步改进,上述万向节机构A中的轴E上安装有直齿轮C;支座A上安装有支座B,支座B上旋转配合有与轴E平行的轴F,轴F同时与相应壳体旋转配合;轴F两端分别安装有直齿轮E和直齿轮F,直齿轮E和直齿轮C同时与安装在支座B上的直齿轮D啮合;直齿轮F与安装在竖杆内的直齿轮G啮合。直齿轮B与锥齿轮的分度圆直径比小于1;锥齿轮A与锥齿轮C的传动比为1:1;直齿轮G与安装在轴G上的直齿轮H啮合直齿轮E与直齿轮F的传动比为1:1,直齿轮H与直齿轮C的传动比小于1,保证轴G的旋转速度小于中柱相对于竖杆摆动的速度,从而保证只要竖杆发生倾斜,万向节机构A就会通过一系列传动带动轴G发生小幅度旋转。发生小幅度旋转的轴G则会通过一系列传动带动摆杆B发生小幅度摆动并解除万向节机构B中轴C和轴套的限制,从而暂时解除对万向节机构B内若干自由度的限制。
作为本技术的进一步改进,上述轴G上对称安装有两个摆杆A;竖杆上端内安装有与轴G平行的轴H;轴H上旋转配合有摆杆B,摆杆B上安装有对其绕轴H摆动复位的复位弹簧;摆杆B的一端上对称安装有两个同中心轴线的弧板;万向节机构B中的轴套和轴C上均安装有摩擦轮;两个摩擦轮与两个弧板一一对应且相互配合;两个摆杆A分别通过安装有阻尼杆的拉绳与摆杆B上未安装弧板的一端绷紧连接,只有拉绳处于紧绷状态才能在轴G发生小幅度旋转时通过拉绳拉动摆杆B产生小幅度摆动并暂时解除对万向节机构B中轴C和轴套的限制。
作为本技术的进一步改进,上述两个弧板通过连接块安装在摆杆B的一端;弧板的内壁上安装有与相应摩擦轮配合的弧形橡胶摩擦垫,摩擦垫可以提高弧板与万向节机构B中轴C和轴套之间的摩擦,使得安装在摆杆B末端的两个弧板对万向节机构B中轴C和轴套的有效限制。复位弹簧的两端分别安装有拉簧块;一个拉簧块与摆杆B上未安装弧板的一端铰接,另一个拉簧块与竖杆内壁铰接;复位弹簧为拉伸弹簧,复位弹簧始终处于拉伸状态。复位弹簧与摆杆B和竖杆内壁之间的连接方式,保证在摆杆B摆动时,复位弹簧可以绕其两端的铰接点进行相对自适应摆动,避免发生摆动的复位弹簧因与摆杆B和竖杆内壁固连而导致的变形疲劳损坏。
作为本技术的进一步改进,上述万向节机构A中的壳体外侧安装有罩A,罩A将位于壳体外侧的零部件进行覆盖保护;竖杆顶端安装有罩B,罩B对万向节机构B中的壳体外侧安装的零部件进行覆盖保护;竖杆内安装有引导和支撑拉绳的定滑轮;凸面镜通过水平的连接杆安装在中柱的下端;衬垫嵌套于万向节机构A的中柱上,且衬垫位于法兰与相应壳体之间。
相对于传统的弯道反射镜,本发明中的万向节机构A中壳体与法兰之间通过可被强力破坏的衬垫进行相对固定,所以当竖杆受到猛烈撞击时导致衬垫碎裂,竖杆产生侧摆,使得万向节机构A对竖杆受到的撞击发挥有效的缓冲,避免竖杆因被撞击而变形,把设备因受到撞击的损坏程度降至最低。
同时,在竖杆受到撞击发生摆动过程中,万向节机构A内的若干自由度受到的限制解除,万向节机构A通过一系列传动带动安装于竖杆内的摆杆B发生摆动,摆杆B带动两个弧板脱离相应轴C和轴套并解除对轴C和轴套的自转限制,从而暂时瞬间解除对万向节机构B中若干自由度的限制。凸面镜在自重作用下带动相应中柱相对竖杆或万向节机构B的壳体产生自适应调整摆动,与凸面镜连接的中柱始终在凸面镜重力牵引下处于竖直状态。而凸面镜在此过程中相对于地面只产生竖直方向或水平方向的平移,凸面镜的镜面的面向方向始终没有发生改变,始终对弯道或路口保持有效的监视状态,防止在竖杆因碰撞发生倾斜而没有被及时维修的时间段内因司机或行人看不到弯道另一边情况而发生车祸。
在竖杆被撞击摆动结束后,对摆板B进行复位的复位弹簧逐渐克服拉绳上的阻尼杆并带动摆杆向在竖杆内的竖直位置状态回摆并最终对万向节机构B中的若干自由度形成限制,从而保证凸面镜在发生自适应平移后其相对于竖杆的位置被暂时固定,避免凸面镜因在风吹作用下发生晃动而导致的对弯道或路口不能进行有效监视的现象的发生。本发明结构简单,具有较好的使用效果。
附图说明
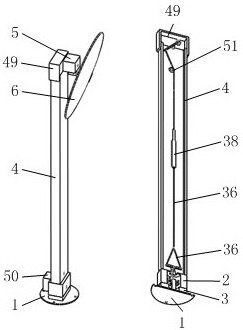
图1是本发明及其剖面示意图。
图2是法兰、衬垫、万向节机构A、直齿轮C、直齿轮D、直齿轮E、轴F、直齿轮F、直齿轮G、直齿轮H与轴G配合剖面示意图。
图3是直齿轮F、直齿轮G、直齿轮H、轴G、摆杆、拉绳A与拉绳B配合剖面示意图。
图4是定滑轮、拉绳B、摆杆B、弧板与摩擦轮配合剖面示意图。
图5是复位弹簧与拉簧块配合示意图。
图6是凸面镜、连接杆、万向节机构B、摩擦轮与弧板配合剖面示意图。
图7是齿环、直齿轮B、轴C、摩擦轮、摩擦垫与弧板配合剖面示意图。
图8是万向节机构A示意图。
图9是万向节机构A侧视剖面示意图。
图10是万向节机构A俯视剖面示意图。
图11是中环剖面示意图。
图12是万向节机构B两个视角的剖面示意图。
图13是万向节机构B与凸面镜配合示意图。
图14是摆杆B、连接块、弧板与摩擦垫配合示意图。
图中标号名称:1、法兰;2、万向节机构A;3、衬垫;4、竖杆;5、万向节机构B;6、凸面镜;7、壳体;8、中环;9、梯形环槽;10、轴A;11、轴套;12、中柱;13、轴B;14、直齿轮A;15、齿环;16、梯形导环;17、轴C;18、直齿轮B;19、锥齿轮A;20、圆筒;21、轴D;22、锥齿轮B;23、锥齿轮C;24、轴E;25、支座A;26、直齿轮C;27、直齿轮D;28、直齿轮E;29、轴F;30、支座B;31、直齿轮F;32、直齿轮G;33、直齿轮H;34、轴G;35、摆杆A;36、拉绳;38、阻尼杆;39、摆杆B;40、轴H;41、连接块;42、弧板;43、摩擦垫;44、摩擦轮;45、复位弹簧;46、拉簧块;47、连接杆;49、罩B;50、罩A;51、定滑轮。
具体实施方式
附图均为本发明实施的示意图,以便于理解结构运行原理。具体产品结构及比例尺寸根据使用环境结合常规技术确定即可。
如图1所示,它包括法兰1、万向节机构A2、衬垫3、竖杆4、万向节机构B5、凸面镜6,其中如图1、2所示,万向节机构A2安装于固定在地面的法兰1上;法兰1上安装有暂时限制万向节机构A2中若干自由度的衬垫3,衬垫3在强力挤压下会发生碎裂;万向节机构A2的上端安装有中空的竖杆4,竖杆4顶端安装有万向节机构B5,万向节机构B5上安装有凸面镜6;如图2、3、4所示,竖杆4内具有限制万向节机构B5内若干自由度的结构;万向节机构A2与竖杆4内旋转配合的水平轴G34传动连接;轴G34的旋转会通过一系列传动暂时解除万向节机构B5内若干自由度受到的限制,此时凸面镜6在自重作用下进行竖直方向和水平方向的自适应平移;待轴G34旋转停止后,万向节机构B5内的若干自由度逐渐恢复被限制的状态。
如图8、9、10所示,上述万向节机构A2包括壳体7、中环8、轴A10、轴套11、中柱12、轴B13、直齿轮A14、齿环15、轴C17、直齿轮B18、锥齿轮A19、圆筒20、轴D21、锥齿轮B22、锥齿轮C23、轴E24、支座A25,其中如图9、10所示,位于壳体7内的中环8外侧安装有同中心轴线的轴套11和轴A10,轴A10和轴套11与壳体7旋转配合;位于中环8内的中柱12上对称安装有两个同中心轴线的轴B13,两个轴B13与中环8旋转配合;如图2所示,中柱12下端与法兰1固连;如图9、10所示,轴B13中心轴线垂直相交于轴A10中心轴线;一个轴B13上安装有直齿轮A14,直齿轮A14与旋转于中环8内壁的齿环15啮合;轴套11中旋转配合有轴C17,轴C17两端分别安装有锥齿轮A19和与齿环15啮合的直齿轮B18;轴套11末端安装有同中心轴线的圆筒20;圆筒20内柱面上对称安装有两个轴D21,每个轴D21上均安装有与锥齿轮A19啮合的锥齿轮B22;安装在壳体7外侧的U型支座A25上旋转配合有与轴G34传动连接的轴E24,轴E24上安装有与两个锥齿轮B22啮合的锥齿轮C23。
如图12所示,上述万向节机构B5包括壳体7、中环8、轴A10、轴套11、中柱12、轴B13、直齿轮A14、齿环15、轴C17、直齿轮B18,其中如图12所示,位于壳体7内的中环8外侧安装有同中心轴线的轴套11和轴A10,轴A10和轴套11与壳体7旋转配合;位于中环8内的中柱12上对称安装有两个同中心轴线的轴B13,两个轴B13与中环8旋转配合;轴B13中心轴线垂直相交于轴A10中心轴线;一个轴B13上安装有直齿轮A14,直齿轮A14与旋转于中环8内壁的齿环15啮合;轴套11中旋转配合有轴C17,轴C17一端安装有与齿环15啮合的直齿轮B18;如图1、6所示,壳体7安装在竖杆4顶端,中柱12竖直下垂;如图1、13所示,凸面镜6安装在中柱12的下端。
如图9、11、12所示,上述万向节机构A2和万向节机构B5中的齿环15外柱面均安装有同中心轴线的梯形导环16,梯形导环16旋转滑动于相应中环8内壁上的梯形环槽9内。梯形导环16与梯形环槽9的配合对齿环15在相应中环8内的周向运动发挥定位导向作用。
如图9、10所示,上述万向节机构A2中的轴E24上安装有直齿轮C26;支座A25上安装有支座B30,支座B30上旋转配合有与轴E24平行的轴F29,轴F29同时与相应壳体7旋转配合;轴F29两端分别安装有直齿轮E28和直齿轮F31,直齿轮E28和直齿轮C26同时与安装在支座B30上的直齿轮D27啮合;直齿轮F31与安装在竖杆4内的直齿轮G32啮合。直齿轮B18与锥齿轮的分度圆直径比小于1;锥齿轮A19与锥齿轮C23的传动比为1:1;直齿轮G32与安装在轴G34上的直齿轮H33啮合直齿轮E28与直齿轮F31的传动比为1:1,直齿轮H33与直齿轮C26的传动比小于1,保证轴G34的旋转速度小于中柱12相对于竖杆4摆动的速度,从而保证只要竖杆4发生倾斜,万向节机构A2就会通过一系列传动带动轴G34发生小幅度旋转。发生小幅度旋转的轴G34则会通过一系列传动带动摆杆B39发生小幅度摆动并解除万向节机构B5中轴C17和轴套11的限制,从而暂时解除对万向节机构B5内若干自由度的限制。
如图3所示,上述轴G34上对称安装有两个摆杆A35;如图4所示,竖杆4上端内安装有与轴G34平行的轴H40;轴H40上旋转配合有摆杆B39,摆杆B39上安装有对其绕轴H40摆动复位的复位弹簧45;如图4、7、14所示,摆杆B39的一端上对称安装有两个同中心轴线的弧板42;万向节机构B5中的轴套11和轴C17上均安装有摩擦轮44;两个摩擦轮44与两个弧板42一一对应且相互配合;两个摆杆A35分别通过安装有阻尼杆38的拉绳36与摆杆B39上未安装弧板42的一端绷紧连接,只有拉绳36处于紧绷状态才能在轴G34发生小幅度旋转时通过拉绳36拉动摆杆B39产生小幅度摆动并暂时解除对万向节机构B5中轴C17和轴套11的限制。
如图7、14所示,上述两个弧板42通过连接块41安装在摆杆B39的一端;弧板42的内壁上安装有与相应摩擦轮44配合的弧形橡胶摩擦垫43,摩擦垫43可以提高弧板42与万向节机构B5中轴C17和轴套11之间的摩擦,使得安装在摆杆B39末端的两个弧板42对万向节机构B5中轴C17和轴套11的有效限制。如图5所示,复位弹簧45的两端分别安装有拉簧块46;一个拉簧块46与摆杆B39上未安装弧板42的一端铰接,另一个拉簧块46与竖杆4内壁铰接;复位弹簧45为拉伸弹簧,复位弹簧45始终处于拉伸状态。复位弹簧45与摆杆B39和竖杆4内壁之间的连接方式,保证在摆杆B39摆动时,复位弹簧45可以绕其两端的铰接点进行相对自适应摆动,避免发生摆动的复位弹簧45因与摆杆B39和竖杆4内壁固连而导致的变形疲劳损坏。
如图1、2所示,上述万向节机构A2中的壳体7外侧安装有罩A50,罩A50将位于壳体7外侧的零部件进行覆盖保护;如图1、6所示,竖杆4顶端安装有罩B49,罩B49对万向节机构B5中的壳体7外侧安装的零部件进行覆盖保护;如图4所示,竖杆4内安装有引导和支撑拉绳36的定滑轮51;如图13所示,凸面镜6通过水平的连接杆47安装在中柱12的下端;如图2所示,衬垫3嵌套于万向节机构A2的中柱12上,且衬垫3位于法兰1与相应壳体7之间。
在万向节机构内部若干自由度没有被限制的情况下,本发明中的凸面镜6在自重作用下进行自适应平移并始终保持在道路拐角处的工作角度。
本发明中万向节机构A2和万向节机构B5均采用十字万向节原理。
本发明中的阻尼杆38采用现有技术。
本发明的工作流程:在初始状态,万向节机构A2中的中柱12处于竖直状态。万向节机构A2的壳体7与法兰1之间安装有衬垫3,以对万向节机构A2中的若干自由度进行限制,使得竖杆4处于竖直状态。万向节机构A2中的轴A10与轴B13均处于水平状态。两个摆杆A35均处于水平状态。复位弹簧45处于拉伸储能状态,摆杆B39带动两个弧板42紧压两个摩擦轮44,对万向节机构B5中的轴C17和轴套11的旋转进行限制,从而限制万向节机构B5内的若干自由度,进而对万向节机构B5中的中柱12与相应壳体7之间相对运动的限制,防止凸面镜6在风里作用下发生摆动。万向节机构B5中的中柱12处于竖直状态。
当竖杆4遭到猛烈撞击时,竖杆4发生倾斜,同时竖杆4带动万向节机构A2中的壳体7对位于壳体7与法兰1之间的衬垫3进行强力破坏,衬垫3瞬间碎裂并解除对万向节机构A2的限制。
万向节机构A2的壳体7相对于其中柱12的摆动可以分解成绕轴A10方向的摆动和绕轴B13方向的摆动。
壳体7绕轴A10相对于中柱12摆动时,也就是中柱12通过轴B13带动中环8绕轴A10相对于壳体7进行摆动,此时,中柱12与中环8相对静止,安装在轴B13上的直齿轮A14通过齿环15和直齿轮B18带动轴C17与中环8绕轴A10中心轴线同步旋转,中环8带动轴套11同步旋转,轴C17与轴套11之间相对静止。轴套11带动圆筒20相对于壳体7同步旋转,圆筒20通过两个轴D21带动安装于两个轴D21上的两个锥齿轮B22绕轴A10中心轴线公转。
与此同时,轴C17带动锥齿轮A19同步自转,且锥齿轮A19的自转速度与圆筒20的绕轴A10中心轴线的旋转速度相等且方向相反,由于圆筒20自转速度与锥齿轮A19的自转速度相等且方向相同,所以锥齿轮A19相对于圆筒20静止,从而安装在两个轴D21上的两个直齿轮B18与锥齿轮A19也相对静止。锥齿轮A19通过两个相对静止的锥齿轮B22带动锥齿轮C23等速旋转,且锥齿轮C23的自转方向与锥齿轮A19的自转方向相反。
锥齿轮C23带动轴E24旋转。万向节机构A2中的轴E24通过直齿轮C26、直齿轮D27、直齿轮E28、轴F29、直齿轮F31、直齿轮G32和直齿轮H33带动轴G34旋转,轴G34带动安装于其上的两个摆杆A35同步摆动。其中一个摆杆A35通过安装有阻尼杆38的拉绳36拉动摆杆B39绕轴H40摆动,安装在摆杆B39一端的两个弧板42带动相应橡胶垫脱离两个摩擦轮44并解除对万向节机构B5中轴C17和轴套11的自转限制。同时,复位弹簧45被进一步拉伸储能。
由于阻尼杆38的阻尼特性,在其中一个摆杆A35向下快速拉动拉绳36时,阻尼杆38不会发生延长而是与拉绳36一起向下拉动摆杆B39,使得摆杆B39发生摆动。
在两个弧板42带动橡胶垫脱离摩擦轮44并解除对万向节机构B5中轴套11和轴C17的自转限制时,万向节机构B5中的若干自由度受到的限制瞬间解除。万向节机构B5中的中柱12在凸面镜6的重力作用下相对于相应壳体7产生绕相应轴A10或轴B13的自适应摆动。且万向节机构B5中的中柱12在相对于壳体7发生摆动过程中始终处于竖直状态,从而使得凸面镜6随中柱12摆动后只是相对于先前的位置发生竖直方向或水平方向上的平移。凸面镜6的镜面始终面对其所监视的路口或弯道。
在万向节机构B5中的中柱12发生摆动结束后,万向节机构B5的状态趋于稳定。此后,在复位弹簧45的复位作用下,摆杆B39一端通过拉绳36逐渐拉伸阻尼杆38,摆杆B39绕轴H40逐渐回摆并最终带动安装于其一端的两个弧板42和安装在弧板42上的橡胶垫对两个摩擦轮44压紧,万向节机构B5中的轴C17和轴套11的自转重新被限制,从而使得万向节机构B5中的若干自由度被再次限制,防止中柱12相对于壳体7发生随意摆动,避免安装在中柱12上的凸面镜6在风力作用下发生摆动,保证凸面镜6在竖杆4倾斜状态下仍然对弯道或路口进行有效监视。
当万向节机构A2中的壳体7绕相应轴B13相对于中柱12摆动时,可以看成是万向节机构A2中的中柱12绕轴B13相对于中环8和壳体7摆动。此时,壳体7通过轴套11和轴C17带动中环8绕轴B13相对于中柱12摆动。直齿轮A14带动齿环15相对于中环8旋转,齿环15再带动直齿轮B18旋转,直齿轮B18通过轴C17带动直齿轮A14相对于壳体7自转,而轴套11相对于壳体7静止,圆筒20相对于壳体7静止。两个锥齿轮B22不产生绕轴C17中心轴线的公转;锥齿轮A19带动两个锥齿轮B22分别相应的轴D21发生自转。两个锥齿轮B22带动锥齿轮C23旋转,锥齿轮C23的旋转方向与锥齿轮A19的旋转方向相反且旋转速度相等。
锥齿轮C23通过一系列传动带动轴G34旋转,轴G34带动两个摆杆A35同步摆动。其中一个摆杆A35通过安装有阻尼杆38的拉绳36拉动摆杆B39绕轴H40摆动,安装在摆杆B39一端的两个弧板42带动相应橡胶垫脱离两个摩擦轮44并解除对万向节机构B5中轴C17和轴套11的自转限制。同时,复位弹簧45被进一步拉伸储能。
由于阻尼杆38的阻尼特性,在其中一个摆杆A35向下快速拉动拉绳36时,阻尼杆38不会发生延长而是与拉绳36一起向下拉动摆杆B39,使得摆杆B39发生摆动。
在两个弧板42带动橡胶垫脱离摩擦轮44并解除对万向节机构B5中轴套11和轴C17的自转限制时,万向节机构B5中的若干自由度受到的限制瞬间解除。万向节机构B5中的中柱12在凸面镜6的重力作用下相对于相应壳体7产生绕相应轴A10或轴B13的自适应摆动。且万向节机构B5中的中柱12在相对于壳体7发生摆动过程中始终处于竖直状态,从而使得凸面镜6随中柱12摆动后只是相对于先前的位置发生竖直方向或水平方向上的平移。凸面镜6的镜面始终面对其所监视的路口或弯道。
在万向节机构B5中的中柱12发生摆动结束后,万向节机构B5的状态趋于稳定。此后,在复位弹簧45的复位作用下,摆杆B39一端通过拉绳36逐渐拉伸阻尼杆38,摆杆B39绕轴H40逐渐回摆并最终带动安装于其一端的两个弧板42和安装在弧板42上的橡胶垫对两个摩擦轮44压紧,万向节机构B5中的轴C17和轴套11的自转重新被限制,从而使得万向节机构B5中的若干自由度被再次限制,防止中柱12相对于壳体7发生随意摆动,避免安装在中柱12上的凸面镜6在风力作用下发生摆动,保证凸面镜6在竖杆4倾斜状态下仍然对弯道或路口进行有效监视。
将万向节机构A2中的壳体7与中柱12之间绕轴A10和轴B13的相对摆动进行合成后,凸面镜6在竖杆4任意方向的倾倒时都只发生竖直方向和水平方向的平移,凸面镜6的镜面始终面对弯道或路口,对路口进行正常监视。
待竖杆4被维修人员重新竖直后在万向节机构A2的壳体7与法兰1之间重新加装衬垫3即可恢复本发明的正常使用。在维修人员对竖杆4进行重新竖直过程中,万向节机构A2中的壳体7相对于相应中柱12绕轴A10和轴B13进行回摆。此过程中,万向节机构A2通过一系列传动带动轴G34反向旋转,轴G34带动两个摆杆A35同步反向摆动。先前通过拉绳36向下拉动摆杆B39的摆杆A35绕轴G34自下向上摆动,并快速解除对伸长的阻尼杆38的拉动,另一个摆板A绕轴G34自上向下摆动向初始位置状态运动,两个摆杆A35都对阻尼杆38不产生拉动。两个弧板42依然对两个摩擦轮44紧压并对万向节机构B5中的轴C17和轴套11的自转处于限制状态。
当竖杆4重新竖直后,等待一段时间,待阻尼杆38自身逐渐收缩至初始状态的长度时后,再快速手动倾倒竖杆4并快速恢复竖直状态。在竖杆4快速倾倒并继续快速竖直过程中,由于竖杆4倾倒会使得摆杆B39带动两个弧板42解除对万向节机构B5中轴C17和轴套11的自转限制,并且阻尼杆38不会立刻被拉伸的复位弹簧45进行拉伸,两个弧板42不会立刻复位并对万向节机构B5中的轴C17和轴套11进行重新限制,所以竖杆4倾倒后立刻竖直的过程中,由于万向节就B中的轴C17和轴套11没有被限制,所以在竖杆4快速再次竖直后,万向节机构B5中的中柱12在凸面镜6的重力作用下相对于壳体7自适应摆动并始终处于竖直状态,从而完成对万向节机构B5的复位。待竖杆4在被第二次竖直后一段时间后,被拉伸的阻尼杆38逐渐收缩复原并对拉绳36重新进行初始状态的绷紧。
然后在万向节机构A2的壳体7与法兰1之间重新安装衬垫3以对万向节机构A2进行固定限制即可。
综上所述,本发明的有益效果为:本发明中的万向节机构A2中壳体7与法兰1之间通过可被强力破坏的衬垫3进行相对固定,所以当竖杆4受到猛烈撞击时导致衬垫3碎裂,竖杆4产生侧摆,使得万向节机构A2对竖杆4受到的撞击发挥有效的缓冲,避免竖杆4因被撞击而变形,把设备因受到撞击的损坏程度降至最低。
同时,在竖杆4受到撞击发生摆动过程中,万向节机构A2内的若干自由度受到的限制解除,万向节机构A2通过一系列传动带动安装于竖杆4内的摆杆B39发生摆动,摆杆B39带动两个弧板42脱离相应轴C17和轴套11并解除对轴C17和轴套11的自转限制,从而暂时瞬间解除对万向节机构B5中若干自由度的限制。凸面镜6在自重作用下带动相应中柱12相对竖杆4或万向节机构B5的壳体7产生自适应调整摆动,与凸面镜6连接的中柱12始终在凸面镜6重力牵引下处于竖直状态。而凸面镜6在此过程中相对于地面只产生竖直方向或水平方向的平移,凸面镜6的镜面的面向方向始终没有发生改变,始终对弯道或路口保持有效的监视状态,防止在竖杆4因碰撞发生倾斜而没有被及时维修的时间段内因司机或行人看不到弯道另一边情况而发生车祸。
在竖杆4被撞击摆动结束后,对摆板B进行复位的复位弹簧45逐渐克服拉绳36上的阻尼杆38并带动摆杆向在竖杆4内的竖直位置状态回摆并最终对万向节机构B5中的若干自由度形成限制,从而保证凸面镜6在发生自适应平移后其相对于竖杆4的位置被暂时固定,避免凸面镜6因在风吹作用下发生晃动而导致的对弯道或路口不能进行有效监视的现象的发生。
- 一种市政工程用的防撞反射镜
- 一种市政用的防撞反射镜设备