服务机器人
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及机器人技术,特别涉及适用于例如维护保养、修理、清洗、救援、家庭监护等服务工作的一种服务机器人。
背景技术
服务机器人可以利用移动底盘移动至指定位置、并利用机械手臂在指定位置执行各类服务任务。
然而,当服务机器人的机械手臂侧向伸出时,机械手臂的重量在服务机器人的施力位置会侧向偏移,若移动底盘的配重不足,则容易导致服务机器人的重心偏移,引发服务机器人倾倒。而且,对移动底盘的配重势必需要增加额外的配重构件,由此增加服务机器人的重量和成本。
由此,如何提高服务机器人的稳定性、并同时降低服务机器人的成本和重量,成为现有技术有待解决的技术问题。
发明内容
在发明的实施例中,提供了一种服务机器人,有助于提高服务机器人的稳定性、并同时降低服务机器人的成本和重量。
在一个实施例中,服务机器人可以包括:
移动底盘;以及,
悬置在移动底盘的上方的机械手臂;
其中,机械手臂包括顺序级联的至少两段手臂骨架以及末端执行机构;
并且,手臂骨架具有用于级联的骨架关节、用于驱动骨架关节的关节驱动电机、以及用于在关节驱动电机与骨架关节之间实现至少两级减速传动的关节同步带机构。
可选地,机械手臂进一步包括从关节同步带机构过线的电气线束。
可选地,位于级联末端的手臂骨架的关节同步带机构的减速级数,高于其上游侧的其他手臂骨架的关节同步带机构的减速级数。
可选地,每段手臂骨架包括连杆条板,其中,连接条板的骨架关节为布置在连杆条板的板面的摆转关节,并且,摆转关节的摆转轴线垂直于连杆条板的板面。
可选地,至少一段手臂骨架进一步包括转接端缘,其中,该转接端缘沿连杆条板的长度方向延伸并与连杆条板集成对接,并且,该转接端缘的板面平行于摆转关节的摆转轴线。
可选地,关节同步带机构包括级联传动的至少两组同步带轮组,其中,位于传动末级的同步带轮组的输出带轮装设于连杆条板,以形成摆转轴线垂直于连杆条板的板面的摆转关节。
可选地,每段手臂骨架包括仿形臂筒,其中,仿形臂筒的骨架关节包括布置在仿形臂筒的端部的扭转关节,并且,摆转关节的摆转轴线沿仿形臂筒的径向方向布置。
可选地,关节同步带机构包括级联传动的至少两组同步带轮组,其中,位于传动末级的同步带轮组的输出带轮装设于仿形臂筒的端部铰接盘,以形成摆转轴线垂直于仿形臂筒的臂筒轴线的摆转关节。
可选地,至少一段手臂骨架的仿形臂筒的骨架关节进一步包括集成在仿形臂筒的端部之间的扭转关节,其中,用于驱动扭转关节的关节驱动电机与该扭转关节之间利用关节同步带机构实现至少两级减速传动。
可选地,关节同步带机构包括级联传动的至少两组同步带轮组,其中,位于传动末级的同步带轮组的输出带轮装设于仿形臂筒的端部之间的扭转盘,以形成扭转轴线平行于仿形臂筒的臂筒轴线的扭转关节。
基于上述实施例,服务机器人的机械手臂可以通过手臂骨架的摆转关节的关节运动执行任务操作,并且,摆转关节与用于驱动其运动的关节驱动电机之间选用关节同步带机构实现减速传动。由于关节同步带机构的重量能够被容易地控制在低于齿轮减速器和谐波减速器的水平,因此,可以在不增加对移动底盘的配重的前提下提高服务机器人的稳定性,即,在提高服务机器人的稳定性的同时,兼顾移动底盘的配重最小化、以及机械手臂的轻量化,而且,关节同步带机构的成本也可以被容易地控制在低于齿轮减速器和谐波减速器的水平,因而还有助于实现服务机器人的低成本化。进而,有助于提高服务机器人的稳定性、并同时降低服务机器人的成本和重量。
另外,关节同步带机构比齿轮减速器具有更开放的布线空间,并且不存在像谐波减速器那样严格的规格限制,因此,关节同步带机构能够便于在机械手臂的内部部署电气线束,并且能够灵活地根据设计需要来设定机械手臂的尺寸。
附图说明
以下附图仅对本发明做示意性说明和解释,并不限定本发明的范围:
图1为一个实施例中的服务机器人的示例性结构示意图;
图2为如图1所示实施例中的服务机器人的第一实例示意图;
图3为如图2所示第一实例中的关节同步带机构在机械手臂的部署示意图;
图4为如图3所示的机械手臂的分段拆解状态图;
图5为如图2所示第一实例的机械手臂在臂根连杆条板的装配结构示意图;
图6为如图5所示装配结构的分解状态示意图;
图7a和图7b为如图2所示第一实例的机械手臂在臂展连杆条板的装配结构示意图;
图8为如图7a和图7b所示装配结构的分解状态示意图;
图9为如图7a和图7b所示装配结构的剖视图;
图10为如图2所示第一实例的机械手臂在臂端连杆条板的装配结构示意图;
图11为如图10所示装配结构的分解状态示意图;
图12如图2所示第一实例的折叠状态示意图;
图13为如图1所示实施例中的服务机器人的第二实例示意图;
图14为如图13所示第二实例中的关节同步带机构在机械手臂的摆转关节的部署示意图;
图15为如图13所示第二实例中的关节同步带机构在机械手臂的扭转关节的部署示意图;
图16a和图16b为如图15所示的扭转关节的装配机构示意图;
图17为如图1所示实施例中的服务机器人的云台机构的装配结构示意图;
图18为如图17所示的云台机构的分解状态示意图。
具体实施方式
为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举实施例,对本发明进一步详细说明。
机械手臂通常需要利用末端执行器来执行相应的任务。若要更灵活、更柔顺地完成任务,机械手臂需要为末端执行器提供更丰富的自由度,而末端执行器的自由度取决于机械手臂的关节数量。
由于每个关节的运动都需要由电机通过减速器(齿轮减速器或谐波减速器)来驱动,因此,关节数量的增加同时也意味着电机的数量以及减速器(齿轮减速器或谐波减速器)的数量也会增加,从而导致机械手臂的重量增加,进而,若要避免服务机器人在机械手臂侧向伸出时倾倒,移动底盘的重量配比也需要等幅增加。
这样虽然可以确保服务机器人的稳定性,但无法降低服务机器人的成本和重量,反而还会由于移动底盘的配重增长而增加服务机器人的成本和重量。
而且,齿轮减速器中的齿轮由于润滑需求而设置相应的封装,因而不利于电气线束在机械手臂内的布线;谐波减速器存在严格的规格限制,导致机械手臂的尺寸必须适配谐波减速器的规格,而不能灵活化设计。
为了克服上述问题,下述的实施例中从对机械手臂减重的角度实施改进,即,使用同步带机构实现减速传动,该用于实现减速传动的同步带机构在本文中称之为关节同步带机构。这里所述的对机械手臂减重,是指在机械手臂具有同等数量的关节数量的前提下,机械手臂的重量比使用齿轮减速器或谐波减速器时更小。若机械手臂减重,则移动底盘的配重也会等额降低,从而,在提高服务机器人的稳定性的同时,还可以降低服务机器人的成本和重量。
另外,关节同步带机构比齿轮减速器具有更开放的布线空间,因此,关节同步带机构能够便于在机械手臂的内部部署电气线束;并且,关节同步带机构不存在像谐波减速器那样严格的规格限制,因而能够灵活地根据设计需要来设定机械手臂的尺寸。
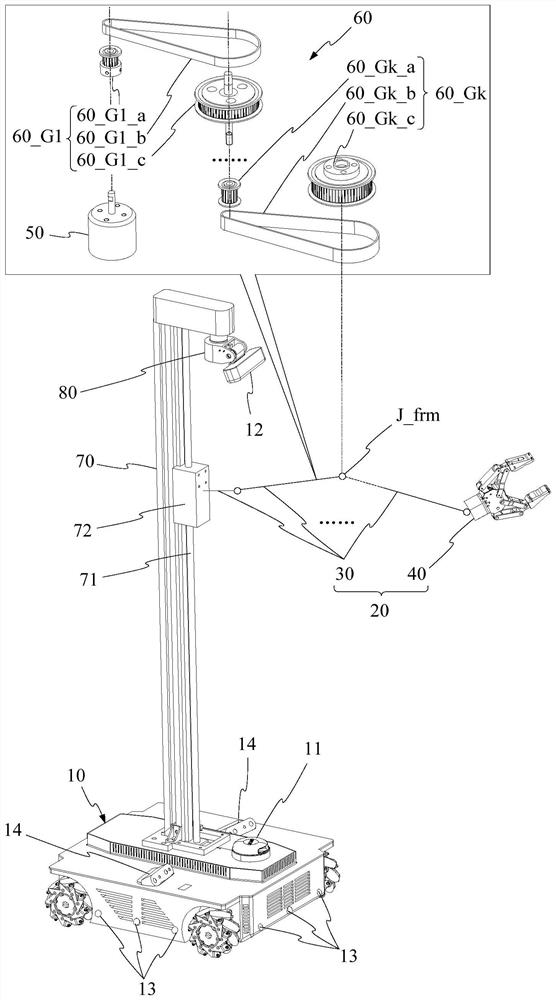
图1为一个实施例中的服务机器人的示例性结构示意图。请参见图1,在一个实施例中,服务机器人可以包括移动底盘10、以及悬置在移动底盘10的上方的机械手臂20。
其中,移动底盘10可以是基于电力驱动的可移动装置,例如,AGV(AutomatedGuided Vehicle,自动引导小车)。作为进一步可选的方式,移动底盘10还可以具有清洁功能,以便于在行进途中可行进路径途经的地面区域实施扫拖清洁。而且,移动底盘10与服务机器人的其余部分之间是可拆卸的,以允许移动底盘10在与其他部分拆卸分解后独立地执行清扫或搬运的任务。
并且,服务机器人可以进一步包括装设在移动底盘10的上方竖直延伸的支撑立柱70,机械手臂20可以装设于支撑立柱70,以实现在移动底盘10的上方的悬置。作为一种优选的方案,为了提高机械手臂20的自由度行程,机械手臂20可以可滑动地装设于支撑立柱70,例如,支撑立柱70可以进一步具有纵向滑轨71、以及滑动装设在纵向滑轨71的升降滑块72,相应地,机械手臂20可以装设于升降滑块72。
而且,移动底盘10除了可以装载机械手臂20之外,还可以具有行进中的自探测功能。例如,移动底盘10的顶面可以装设有诸如激光雷达等低位探测机构11,并且,支撑立柱70的顶端可以装设有诸如相机模组等高位探测机构12,高位探测机构12可以装设在支撑立柱70的顶端的云台机构80。
例如,若低位探测机构11选用激光雷达、高位探测机构12选用三维相机,则,低位探测机构11和高位探测机构12可以支持服务机器人的激光导航和3D视觉导航VSLAM(Visual Simultaneous Localization and Mapping,视觉即时定位与地图构建)功能,即,服务机器人在行进过程中可以利用低位探测机构11实现二维地图构件、或基于二维地图的激光导航,同时,服务机器人还可以利用高位探测机构12实现三维地图构建、或基于三维地图的3D视觉导航。
从而,服务机器人(例如集成在移动底盘10的主控制器)可以根据低位探测机构11和/或高位探测机构12的探测结果,控制移动底盘10移动至服务目标(例如置于地面的物品、或者以任意姿态置于台面的杯子、或者准备接受服务的人)所在的指定位置;并且,服务机器人(例如集成在移动底盘10的主控制器)还可以根据高位探测机构12的探测结果,对指定位置处的服务目标进行目标识别,并且判断服务目标的位置和姿态,以便于根据获取到的任务指令,控制机械手臂20执行对服务目标的任务操作。
另外,移动底盘10的外周壁可以部署有低位避障机构13(例如超声波避障探测机构),移动底盘10的顶部还可以装设有仰倾布置的高位避障机构14(例如视觉避障探测机构),以提供服务机器人在移动过程中的避障检测。
机械手臂20对服务目标执行的任务操作,可以通过关节运动来实现。即,机械手臂20可以包括顺序级联的至少两段手臂骨架30以及末端执行机构40(例如两指、三指或五指的机械手,或者其他执行工具),并且,每段手臂骨架30具有用于级联的骨架关节J_frm。
机械手臂20的每段手臂骨架30还可以具有(装设)用于驱动骨架关节J_frm的关节驱动电机50,关节驱动电机50可以在集成于机械手臂20中的手臂控制器(例如该手臂控制器可以独立实施控制、也可以受控于移动底盘10的主控制器)的控制下产生动力输出,摆转关节J_swg在该动力输出的驱使下可以执行摆转运动。
机械手臂20的每段手臂骨架30还可以具有(装设)用于在关节驱动电机50与骨架关节J_frm之间实现至少两级减速传动的关节同步带机构60,以便于将关节驱动电机50产生的动力输出转换为转速足够低、扭矩足够大的驱动力。
例如,关节同步带机构60可以包括级联传动的至少两组同步带轮组60_G1~60_Gk,k为大于等于2的正整数,其中,每组同步带轮组60_Gi可以包括输入带轮60_Gi_a、同步带60_Gi_b、以及输出带轮60_Gi_c,i为大于等于1且小于等于k的正整数,同步带60_Gi_b张紧套设在输入带轮60_Gi_a和输出带轮60_Gi_c,并且,输出带轮60_Gi_c的外径大于输入带轮60_Gi_a的外径。
其中,位于传动首级的同步带轮组60_G1的输入带轮60_G1_a与关节驱动电机50的输出轴同轴连接,位于传动末级的同步带轮组60_Gk的输出带轮60_Gk_c可以与骨架关节J_frm同轴部署或者作为骨架关节J_frm的至少一部分、并且可以与下一级同步带轮组的输入带轮同轴连接,从而,关节驱动电机50产生的动力输出,从传动首级的同步带轮组60_G1的输入带轮60_G1_a开始,经过至少两组同步带轮组60_G1~60_Gk的逐级转换,可以在传动末级的同步带轮组60_Gk的输出带轮60_Gk_c形成转速足够低、扭矩足够大的驱动力。
另外,在实际设计时,在末端部署的关节驱动电机的规格可以小于在根部部署的关节驱动电机50的规格,相应地,在末端部署的关节驱动电机的输出扭矩会相对小,若相对小的扭矩输出不能满足末端执行器的任务负载,则,为了弥补输出扭矩的不足,位于级联末端的手臂骨架30的关节同步带机构60的减速级数,可以高于其上游侧的其他手臂骨架30的关节同步带机构60的减速级数。
如上可见,由于关节同步带机构60的重量能够被容易地控制在低于齿轮减速器和谐波减速器的水平,因此,可以在不增加对移动底盘10的配重的前提下提高服务机器人的稳定性,即,在提高服务机器人的稳定性的同时,能够兼顾移动底盘10的配重最小化、以及机械手臂20的轻量化,而且,关节同步带机构60的成本也可以被容易地控制在低于齿轮减速器和谐波减速器的水平,因而还有助于实现服务机器人的低成本化。进而,有助于提高服务机器人的稳定性、并同时降低服务机器人的成本和重量。
另外,关节同步带机构60比齿轮减速器具有更开放的布线空间,因此,若机械手臂30进一步包括从关节同步带机构60过线的电气线束,则,关节同步带机构60能够便于在机械手臂的内部部署电气线束。并且,关节同步带机构60不存在像谐波减速器那样严格的规格限制,因而能够灵活地根据设计需要来设定机械手臂20的尺寸。
在实际设计时,根据机械手臂20的自由度需求,每段手臂骨架的骨架关节J_frm可以包括摆转关节J_swg和/或扭转关节J_tor。
以机械手臂20的根部为级联的上游侧、机械手臂20的末端为级联的下游侧,则,每段手臂骨架30靠近机械手臂20的根部的一端为上游级联端、靠近机械手臂20的末端的另一端为下游级联端,即,手臂骨架30可以具有在级联方向上位于上游侧的上游级联端、以及位于下游侧的下游级联端。若手臂骨架的骨架关节J_frm包括摆转关节J_swg,则,摆转关节J_swg可以布置在手臂骨架30的下游级联端,基于这样的设置方式:
位于级联首端的手臂骨架30的上游级联端可以装设在支撑立柱70(升降滑块)、位于级联首端的手臂骨架30的下游级联端的摆转关节J_swg可以连接下游侧的手臂骨架30的上游级联端;
依次类推,位于非级联首端的其他的手臂骨架30的上游级联端可以连接其上游侧的手臂骨架30的下游级联端的摆转关节J_swg,直至级联末端的手臂骨架30;
并且,位于级联末端的手臂骨架30的下游级联端的摆转关节J_swg可以连接末端执行机构40。
而且,各段手臂骨架30的摆转关节J_swg的摆转轴线的布置方向可以彼此相同,以实现机械手臂20的全程单向摆动。
或者,各手臂骨架30的摆转关节J_swg的摆转轴线的布置方向也可以不全相同,例如,位于级联末端的手臂骨架30的摆转关节J_swg的摆转轴线的布置方向,可以不同于其上游侧的其他摆转关节J_swg的摆转轴线的布置方向,由此可以实现机械手臂20的主体单向摆动、以及末端变向摆动。
从而,通过摆转关节J_swg的摆转运动,可以驱动顺序级联的至少两端手臂骨架30摆转,使末端执行机构40处于用于执行任务操作的指定位姿。
若手臂骨架的骨架关节J_frm包括扭转关节J_tor,则,扭转关节J_tor可以布置在手臂骨架30的端部之间(上游级联端和下游级联端之间)。
为了更好地理解该实施例中的服务机器人的结构实现,下面,结合实例进行举例说明。
图2为如图1所示实施例中的服务机器人的第一实例示意图。图3为如图2所示第一实例中的关节同步带机构在机械手臂的部署示意图。图4为如图3所示的机械手臂的分段拆解状态图。请参见图2至图4,在第一实例中,以连杆式机械手臂21(如图1所示的机械手臂20的一种可选形态)为例进行说明,即,连杆式机械手臂21的每段手臂骨架可以包括连杆条板31(如图1所示的手臂骨架30的一种可选形态),每段连杆式机械手臂21的骨架关节J_frm为摆转关节J_swg,并且,摆转关节J_swg布置在连杆条板31的板面,并且,摆转关节J_swg的摆转轴线垂直于连杆条板31的板面。
在第一实例的图示中,以四段手臂骨架(连杆条板31)为例,即,该连杆式机械手臂21的手臂条板31可以包括一段臂根连杆条板311、两段臂展连杆条板312和313、以及一段臂端连杆条板314。但可以理解的是,手臂骨架的段数可以不限于此,具体地,手臂骨架的段数可以随着臂展连杆条板的段数而变化,例如,该连杆式机械手臂21可以包括多于两端臂展连杆条板(多于四段手臂骨架)、或者只包括一段臂展连杆条板(三段手臂骨架)、甚至可以不包括臂展连杆条板(两段手臂骨架)。
臂根连杆条板311、臂展连杆条板312和313、以及臂端连杆条板314中的每段连杆条板31的关节同步带机构61、62、63或64(如图1所示关节同步带机构60的不同集成形态),都可以包括级联传动的至少两组同步带轮组,其中,位于传动末级的同步带轮组的输出带轮可以装设于该段连杆条板,以形成摆转轴线垂直于该段连杆条板的板面的摆转关节J_swg_311或J_swg_312或J_swg_313或J_swg_314,并且,位于非传动末级的同步带轮组的输出带轮可以与下一传动级的输入带轮通过带轮支架同轴装设于该段连杆条板,以使得各级同步带轮组的输入带轮和输出带轮的轮轴均垂直于该段连杆条板的板面。
而且,对于臂根连杆条板311、臂展连杆条板312和313、以及臂端连杆条板314中的每段连杆条板的关节同步带机构61、62、63或64,其包含的各组同步带轮组沿该段连杆条板的厚度方向错层部署,例如,至少两组同步带轮组可以沿该段连杆条板的厚度方向交替地错层部署在该段连杆条板的相反两侧,或者,至少两组同步带轮组沿该段连杆条板的厚度方向错层部署在该段连杆条板的同侧。
另外,末端执行机构40可以通过以末端转接架400装设于臂端连杆条板314的下游级联端的摆转关节J_swg_314,以便于末端执行机构40可以根据实际的任务需要而被更换。即,末端转接架400可以是支持不同类型的末端执行机构的通用接口构件。
下面,对臂根连杆条板311、臂展连杆条板312和313、以及臂端连杆条板314分别进行详细说明。
图5为如图2所示第一实例的机械手臂在臂根连杆条板的装配结构示意图。图6为如图5所示装配结构的分解状态示意图。请参见图5和图6,臂根连杆条板311的上游级联端可以连接升降滑块72、下游级联端可以具有用于级联臂展连杆条板312的第一摆转关节J_swg_311,并且,臂根连杆条板311装设有用于在第一关节驱动电机51与第一摆转关节J_swg_311之间实现两级减速传动的关节同步带机构(或称为第一同步带机构)61,该关节同步带机构61可以包括级联传动的两组同步带轮组61_G1和61_G2,其中:
位于传动首级的同步带轮组61_G1可以包括首级输入带轮61_G1_a、首级同步带61_G1_b、以及首级输出带轮61_G1_c,并且,首级输入带轮61_G1_a与第一关节驱动电机51的输出轴同轴连接;
位于传动末级的同步带轮组61_G2可以包括末级输入带轮61_G2_a、末级同步带61_G2_b、以及末级输出带轮61_G2_c,并且,末级输入带轮61_G2_a与首级输出带轮61_G1_c同轴连接,末级输出带轮61_G2_c可以与臂根连杆条板311的第一摆转关节J_swg_311作为第一摆转关节J_swg_311的至少一部分。
例如,位于传动末级的同步带轮组61_G2的末级输出带轮61_G2_c可以通过第一带轮轴承610装设于臂根连杆条板311的下游级联端(末级输出带轮61_G2_c与第一带轮轴承610分别位于臂根连杆条板311的相反两侧),以形成摆转轴线垂直于臂根连杆条板311的板面的第一摆转关节J_swg_311,并且,臂展连杆条板312的上游级联端可以固定装设于第一带轮轴承610(与末级输出带轮61_G2_c同轴连接),以实现臂根连杆条板311与臂展连杆条板312通过第一摆转关节J_swg_311的级联。
相应地,位于传动首级(非传动末级)的同步带轮组61_G1的首级输出带轮61_G1_c可以与下一传动级的末级输入带轮61_G2_a通过第一带轮支架611同轴装设于臂根连杆条板311,以使得各级同步带轮组61_G1和61_G2的输出带轮的轮轴均垂直于臂根连杆条板311的板面。例如,贯穿螺钉612穿设于首级输出带轮61_G1_c(轮心装设有用于支撑贯穿螺钉612的带轮轴承614、端面装设有用于对贯穿螺钉612轴向定位的带轮垫片615)和末级输入带轮61_G2_a、并通过锁止螺母613固定于第一带轮支架611,并且,第一带轮支架611可以利用螺钉固定装设在臂根连杆条板311的一侧板面(与第一关节驱动电机51所在侧相反的一侧面板)。
关节同步带机构61的两组同步带轮组61_G1和61_G2在臂根连杆条板311的厚度方向上错层部署,图5和图6中以两组同步带轮组61_G1和61_G2错层部署在臂根连杆条板311的同侧为例,但实际设计时并不限于此。
在各段手臂条板31,臂根连杆条板311的长度最小,例如,臂根连杆条板311的长度仅允许沿长度方向部署一组同步带轮组61_G2,因此,两组同步带轮组61_G1和61_G2的部署方向(同步带张紧方向)可以相交,即,位于传动首级的同步带轮组61_G1可以沿臂根连杆条板311的宽度方向部署,第一关节驱动电机51可以通过第一电机支架510装设在臂根连杆条板311的宽度方向的宽度方向上的侧边之外,并且,位于传动末级的同步带轮组61_G2可以沿臂根连杆条板311的长度方向部署。
另外,臂根连杆条板311的第一关节驱动电机51的电机驱动模组(在附图中被遮挡)可以与手臂控制器集成装设,因此,第一关节驱动电机51的电机驱动模组可以不依赖于额外的线束连接即可受控于手臂控制器,然而,臂展连杆条板312和313、以及臂端连杆条板314和末端执行机构40中的电机驱动模组则需要通过连杆式机械手臂21的臂内电气线束受控于手臂控制器。
为了便于部署臂内电气线束,臂根连杆条板311可以进一步装设有走线护套616,该走线护套616用于提供避免臂内轴线与关节同步带机构61的传动路径发生干涉,例如,该走线护套616可以固定装设于第一带轮支架611,并且该走线护套616的一端探出在臂根连杆条板311的边缘(与第一关节驱动电机51同侧的宽度方向上的侧边)之外、另一端与末级输出带轮61_G2_c(第一摆转关节J_swg_311)的中空轴腔连通,末级输出带轮61_G2_c的中空轴腔与第一带轮轴承610的中空轴腔通过开设于臂根连杆条板311的过线孔617(位于下游级联端)连通,从而,形成避让关节同步带机构61的传动路径、并贯穿末级输出带轮61_G2_c(第一摆转关节J_swg_311)的布线空间。
对于臂展连杆条板312和313而言,位于上游侧的臂展连杆条板312的上游级联端可以连接臂根连杆条板311的下游级联端的第一摆转关节J_swg_311(第一带轮轴承610),并且,该臂展连杆条板312的下游级联端可以具有第二摆转关节J_swg_312,用于级联其下游侧的臂展连杆条板313;位于下游侧的臂展连杆条板313的上游级联端可以连接臂展连杆条板312的下游级联端的第二摆转关节J_swg_312,并且,该臂展连杆条板313的下游级联端可以具有第三摆转关节J_swg_313,用于级联其下游侧的臂端连杆条板314。也就是,除了上游级联端和下游级联端的连接对象不同之外,臂展连杆条板312和313的结构和减速传动原理基本相同,即:
臂展连杆条板312装设有用于驱动第二摆转关节J_swg_312的第二关节驱动电机52,类似地,臂展连杆条板313装设有用于驱动第三摆转关节J_swg_313的第三关节驱动电机53;
臂展连杆条板312装设有用于在第二关节驱动电机53与第二摆转关节J_swg_312之间实现两级减速传动的关节同步带机构(或称为第二同步带机构)62,类似地,臂展连杆条板313装设有用于在第三关节驱动电机53与第三摆转关节J_swg_313之间实现两级减速传动的关节同步带机构(或称为第三同步带机构)63。
因此,下文将仅以其中的臂展连杆条板313为例进行说明。
图7a和图7b为如图2所示第一实例的机械手臂在臂展连杆条板的装配结构示意图。图8为如图7a和图7b所示装配结构的分解状态示意图。图9为如图7a和图7b所示装配结构的剖视图。请参见图7a和图7b以及图8和图9,臂展连杆条板313装的关节同步带机构63可以包括级联传动的两组同步带轮组63_G1和63_G2,其中:
位于传动首级的同步带轮组63_G1可以包括首级输入带轮63_G1_a、首级同步带63_G1_b、以及首级输出带轮63_G1_c,并且,首级输入带轮63_G1_a与第三关节驱动电机53(直接固定装设在臂展连杆条板313)的输出轴同轴连接;
位于传动末级的同步带轮组63_G2可以包括末级输入带轮63_G2_a、末级同步带63_G2_b、以及末级输出带轮63_G2_c,并且,末级输入带轮63_G2_a与首级输出带轮63_G1_c同轴连接,末级输出带轮63_G2_c可以作为第三摆转关节J_swg_313的至少一部分。
例如,位于传动末级的同步带轮组63_G2的末级输出带轮63_G2_c可以通过第三带轮轴承630装设于臂展连杆条板313的下游级联端(末级输出带轮63_G2_c与第三带轮轴承630分别位于臂展连杆条板313的相反两侧),以形成摆转轴线垂直于臂展连杆条板313的板面的第三摆转关节J_swg_313,并且,臂端连杆条板314的上游级联端可以固定装设于末级输出带轮63_G2_c(与末级输出带轮61_G2_c同轴连接),以实现臂展连杆条板313与臂端连杆条板314通过第三摆转关节J_swg_313的级联。同理,臂展连杆条板312的关节同步带机构62中,位于传动末级的同步带轮组的末级输出带轮也可以通过第二带轮轴承装设于臂展连杆条板312的下游级联端,以形成摆转轴线垂直于臂展连杆条板312的板面的第三摆转关节J_swg_312,臂展连杆条板313的上游级联端可以固定装设于臂展连杆条板312的末级输出带轮(同轴连接),以实现臂展连杆条板312与臂展连杆条板313通过第二摆转关节J_swg_312的级联。
相应地,位于传动首级(非传动末级)的同步带轮组63_G1的首级输出带轮63_G1_c可以与下一传动级的末级输入带轮63_G2_a通过第三带轮支架631同轴装设于臂展连杆条板313,以使得各级同步带轮组63_G1和63_G2的输出带轮的轮轴均垂直于臂展连杆条板313的板面。例如,带轮螺钉632穿设于首级输出带轮63_G1_c、并通过紧固螺母633固定于第三带轮支架631,首级输出带轮63_G1_c的端面还固定有吊装法兰轴634,末级输入带轮63_G2_a固定于装设于吊装法兰轴634,并且,第三带轮支架631可以利用螺钉固定装设在臂展连杆条板313的一侧板面(与第三关节驱动电机53所在侧相反的一侧面板)。同理,臂展连杆条板312的关节同步带机构62中,也可以具有类似的第二带轮支架。
关节同步带机构63的两组同步带轮组63_G1和63_G2在臂展连杆条板313的厚度方向上错层部署,图7a和图7b以及图8和图9中以两组同步带轮组63_G1和63_G2错层部署在臂展连杆条板313的相反两侧为例,但实际设计时并不限于此。关节同步带机构62在臂展连杆条板312的部署方式同理。
臂展连杆条板313的长度可以相对大(大于臂根连杆条板311),例如,臂展连杆条板313的长度可以大于两组同步带轮组63_G1和63_G2的接续长度,因此,两组同步带轮组63_G1和63_G2可以沿臂展连杆条板313的长度方向延展接续部署。关节同步带机构62在臂展连杆条板312的部署方式同理。
另外,臂展连杆条板313的第三关节驱动电机53可以受控于装设在该臂展连杆条板313的电机驱动模组530,电机驱动模组530可以通过前文所述的臂内电气线束受控于手臂控制器,为此,臂展连杆条板313的级联上游端可以开设有供臂内电气线束(在图9中由虚线表示)穿入的穿线入孔531,即,臂内电气线束可以从位于传动首级(非传动末级)的同步带轮组63_G1所在的一侧通过穿线入孔531,穿入至第三关节驱动电机53所在的一侧与电机驱动模组530电气连接。
而且,为了其下游侧的臂端连杆条板314和末端执行机构40可以受控于手臂控制器,臂内电气线束可以从臂展连杆条板313的过线通孔533回穿至同步带轮组63_G1所在的一侧,并且,末级输出带轮63_G2_c可以具有中空轴腔,该中空轴腔可以通过臂展连杆条板313的级联下游端的穿线出孔532与第三带轮轴承630的中空轴腔连通,以形成贯穿末级输出带轮63_G2_c(第三摆转关节J_swg_313)的布线空间,以供从其中穿过的臂内电气线束向下游侧的臂端连杆条板314和末端执行机构40延展部署。
也就是,臂展连杆条板312和313的级联上游端和级联下游端都可以具有供臂内电气线束穿过的布线空间,并且,臂展连杆条板312和313还可以在级联上游端和级联下游端之间具有过线通孔,以使得臂内电气线束可以采用迂回穿线的方式形成向下游侧的延展部署。
图10为如图2所示第一实例的机械手臂在臂端连杆条板的装配结构示意图。图11为如图10所示装配结构的分解状态示意图。请参见图10和图11,臂端连杆条板314的上游级联端可以连接臂展连杆条板313的下游级联端的第三摆转关节J_swg_313(与末级输出带轮63_G2_c同轴连接),臂端连杆条板314的下游级联端可以具有用于级联(通过末端转接架400)末端执行机构40的第四摆转关节J_swg_314,并且,臂端连杆条板314装设有用于在第四关节驱动电机54与第四摆转关节J_swg_314之间实现三级减速传动的关节同步带机构(或称为第四同步带机构)64,该关节同步带机构64可以包括级联传动的三组同步带轮组64_G1和64_G2以及64_G3,其中:
位于传动首级的同步带轮组64_G1可以包括首级输入带轮64_G1_a、首级同步带64_G1_b、以及首级输出带轮64_G1_c,并且,首级输入带轮64_G1_a与第四关节驱动电机54(直接固定装设在臂端连杆条板314)的输出轴同轴连接;
位于传动次级的同步带轮组64_G2可以包括次级输入带轮64_G2_a、次级同步带64_G2_b、以及次级输出带轮64_G2_c,并且,次级输入带轮64_G2_a与首级输出带轮64_G1_c同轴连接;
位于传动末级的同步带轮组64_G3可以包括末级输入带轮64_G3_a、末级同步带64_G3_b、以及末级输出带轮64_G3_c,并且,末级输入带轮64_G3_a与次级输出带轮64_G2_c同轴连接,末级输出带轮64_G3_c可以作为第四摆转关节J_swg_314的至少一部分。
例如,位于传动末级的同步带轮组64_G3的末级输出带轮64_G3_c可以装设于臂端连杆条板314的支撑轴台640,以形成摆转轴线垂直于臂端连杆条板314的板面的第四摆转关节J_swg_314,并且,末端执行机构40通过末端转接架400固定装设于末级输出带轮64_G3_c,以实现臂端连杆条板314与末端执行机构40通过第四摆转关节J_swg_314的级联(基于末端转接架400的桥接)。
相应地,位于传动首级(非传动末级)的同步带轮组64_G1的首级输出带轮64_G1_c可以与下一传动级的次级输入带轮64_G2_a通过第四带轮支架641同轴装设于臂端连杆条板314的一侧板面,位于传动次级(非传动末级)的同步带轮组64_G2的次级输出带轮64_G2_c可以与下一传动级的末级输入带轮64_G3_a通过第五带轮支架644同轴装设于臂端连杆条板314的另一侧板面,以使得各级同步带轮组64_G1和64_G2以及64_G3的输出带轮的轮轴均垂直于臂端连杆条板314的板面。
例如,带轮螺钉642穿设于首级输出带轮64_G1_c、并通过紧固螺母固定于第四带轮支架641,首级输出带轮64_G1_c的端面还固定有吊装法兰轴643,次级输入带轮64_G2_a固定于装设于吊装法兰轴643,并且,第四带轮支架641可以利用螺钉固定装设在臂端连杆条板314的一侧板面(与第四关节驱动电机54所在侧相反的一侧面板)。同理,另一带轮螺钉645穿设于次级输出带轮64_G2_c、并通过紧固螺母固定于第五带轮支架644,次级输出带轮64_G2_c的端面还固定有另一吊装法兰轴646,末级输入带轮64_G3_a固定于装设于吊装法兰轴643,并且,第五带轮支架644可以利用螺钉固定装设在臂端连杆条板314的另一侧板面(与第四关节驱动电机54同侧的板面)。
关节同步带机构64的三组同步带轮组64_G1和64_G2以及64_G3在臂端连杆条板314的厚度方向上错层部署,图10和图11中以三组同步带轮组64_G1和64_G2以及64_G3错层部署在臂端连杆条板314的相反两侧为例,但实际设计时并不限于此。
臂端连杆条板314的长度可以相对大(大于臂根连杆条板311),例如,臂端连杆条板314的长度可以大于三组同步带轮组64_G1和64_G2以及64_G3的接续长度,因此,三组同步带轮组64_G1和64_G2以及64_G3可以沿臂展连杆条板313的长度方向延展接续部署。
与臂展连杆条板312和313类似,臂端连杆条板314的第四关节驱动电机54可以受控于装设在该臂端连杆条板314的电机驱动板540,电机驱动板540可以通过前文所述的臂内电气线束受控于手臂控制器。
另外,臂端连杆条板314的上游级联端可以进一步集成有转接端缘310,其中,该转接端缘310可以沿臂端连杆条板314的长度方向延伸并在臂端连杆条板的上游级联端与臂端连杆条板314集成对接,并且该转接端缘310的板面平行于第四摆转关节J_swg_314的摆转轴线。从而,当臂端连杆条板314的上游级联端通过转接端缘310级联臂展连杆条板313的下游级联端的第三摆转关节J_swg_313时,第四摆转关节J_swg_314与第三摆转关节J_swg_313的摆转轴线垂直。
若臂根连杆条板311、臂展连杆条板312和313均布置为平行于移动底盘10的承载平面(顶面),则,第一摆转关节J_swg_311、第二摆转关节J_swg_312、第三摆转关节J_swg_313均垂直于移动底盘10的承载平面(顶面),以为连杆式机械手臂21提供三级水平摆转的自由度,并且,通过转接端缘310级联的臂端连杆条板314侧向垂直于移动底盘10的承载平面(顶面),以使得第四摆转关节J_swg_314平行于移动底盘10的承载平面(顶面),以为连杆式机械手臂21提供一级仰俯摆转的自由度。
图12如图2所示第一实例的折叠状态示意图。请参见图12(手臂骨架31均像图2所示的那样装设有外观罩壳),对于连杆式机械手臂21具有三级水平摆转和一级仰俯摆转的自由度的第一实例而言,在服务机器人处于待机或充电或者休息的非工作时段时,三级水平摆转的自由度可以允许连杆式机械手臂21环绕支撑立柱70折叠收拢,以减少服务机器人的占用空间,并进一步提高服务机器人在待机或充电或者休息的非工作时段的稳定性。
在上述的第一实例中,臂根连杆条板311实现了一种折弯平摆臂段的骨架形态、臂展连杆条板312和313实现了一种直长平摆臂段的骨架形态、臂段连杆条板314实现了一种直长换向臂段的骨架形态,并且,按照从臂根到臂端的臂展方向顺序采用了三种骨架形态的级联组合。可以理解的是,折弯平摆臂段、直长平摆臂段以及直长换向臂段可以选择其中的至少一种按照任意的顺序级联,以形成各种可能形态的机械手臂,而不应当局限于第一实例中的级联顺序和组合方式。例如,任意一段手臂骨架都可以呈折弯平摆臂段或直长平摆臂段或直长换向臂段的骨架形态,即,至少一段手臂骨架(不限于臂根、臂展亦或是臂端)可以进一步包括转接端缘。
同样地,臂根连杆条板311以及臂展连杆条板312和313的减速级数可以不限于两级,臂段连杆条板314的减速级数也不应当局限于三级。
图13为如图1所示实施例中的服务机器人的第二实例示意图。图14为如图13所示第二实例中的关节同步带机构在机械手臂的摆转关节的部署示意图。请参见图13和图14,在第二实例中,以仿人式机械手臂22(如图1所示的机械手臂20的另一种可选形态)为例进行说明,即,仿人式机械手臂22的每段手臂骨架包括仿形臂筒32(如图1所示的手臂骨架30的另一种可选形态),仿形臂筒32的骨架关节J_frm可以包括摆转关节J_swg,其中,摆转关节J_swg布置在仿形臂筒32的端部,并且,摆转关节J_swg的摆转轴线垂直于仿形臂筒32的臂筒轴线(例如沿仿形臂筒32的径向方向布置)。
在第二实例的图示中,以三段手臂骨架(仿形臂筒32)为例,即,该仿人式机械手臂22的仿形臂筒32可以包括一段肩部仿形臂筒321、一段上臂仿形臂筒322、以及一段前臂仿形臂筒323。
肩部仿形臂筒321、上臂仿形臂筒322以及前臂仿形臂筒323中的每段仿形臂筒32都可以包括前文所述的关节同步带机构60的相应集成形态,并且,关节同步带机构60在肩部仿形臂筒321、上臂仿形臂筒322以及前臂仿形臂筒323的集成形态都可以包括级联传动的至少两组同步带轮组,其中,各组同步带轮组可以沿垂直于仿形臂筒32的下游级联端的端部铰接盘的方向,错层布置在该端部铰接盘(同侧或相反两侧的盘面),并且,位于传动末级的同步带轮组的输出带轮可以装设于仿形臂筒32的下游级联端的端部铰接盘,即:
肩部仿形臂筒321包括肩部主臂筒321a(装设于升降滑块72)、以及探出在肩部主臂筒321a的下游级联端之外的肩部铰接盘321b(与肩部主臂筒321a的轴向截面共面),并且,关节同步带机构60在肩部仿形臂筒321的集成形态中,各组同步带轮组沿垂直于肩部铰接盘321b的方向错层布置在肩部铰接盘321b的同侧或相反两侧的盘面,其中,传动末级的同步带轮组的输出带轮可以装设在肩部铰接盘321b,以形成摆转轴线垂直于肩部仿形臂筒321的臂筒轴线方向布置(沿肩部仿形臂筒321的径向方向布置)的肩部摆转关节J_swg_321;
上臂仿形臂筒322包括在上游级联端连接肩部摆转关节J_swg_321的肩臂挂接盘322a(与肩部铰接盘321b同轴连接)、从肩臂挂接盘322a向下游级联端顺序同轴连接的第一上臂主臂筒322b和第二上臂主臂筒322c、以及在下游级联端探出在第二上臂主臂筒322c的端部之外的臂肘铰接盘322d(与第一上臂主臂筒322b和第二上臂主臂筒322c的轴向截面共面),并且,关节同步带机构60在上臂仿形臂筒322的集成形态中,各组同步带轮组沿垂直于臂肘铰接盘322d的方向错层布置在臂肘铰接盘322d的同侧或相反两侧的盘面,其中,传动末级的同步带轮组的输出带轮可以装设在臂肘铰接盘322d,以形成摆转轴线垂直于上臂仿形臂筒322的臂筒轴线方向布置(沿上臂仿形臂筒322的径向方向布置)的臂肘摆转关节J_swg_322;
前臂仿形臂筒323包括在上游级联端连接臂肘摆转关节J_swg_322的臂肘挂接盘323a(与臂肘铰接盘322d同轴连接)、从臂肘挂接盘323a向下游级联端顺序同轴连接的第一前臂主臂筒323b和第二前臂主臂筒323c、以及在下游级联端探出在第二前臂主臂筒323c的端部之外的腕部铰接盘323d(与第一前臂主臂筒323b和第二前臂主臂筒323c的轴向截面共面),并且,关节同步带机构60在前臂仿形臂筒323的集成形态中,各组同步带轮组沿垂直于腕部铰接盘323d的方向错层布置在腕部铰接盘322d的同侧或相反两侧的盘面,其中,传动末级的同步带轮组的输出带轮可以装设在腕部铰接盘322d,以形成摆转轴线垂直于前臂仿形臂筒323的臂筒轴线方向布置(沿前臂仿形臂筒323的径向方向布置)的腕部摆转关节J_swg_323;
末端执行机构40可以通过以末端转接架400'装设于前臂仿形臂筒323的下游级联端的腕部摆转关节J_swg_323,以便于末端执行机构40可以根据实际的任务需要而被更换。即,末端转接架400'可以是支持不同类型的末端执行机构的通用接口构件。
图15为如图13所示第二实例中的关节同步带机构在机械手臂的扭转关节的部署示意图。图16a和图16b为如图15所示的扭转关节的装配机构示意图。请参见图13和图14的同时进一步结合图15以及图16a和图16b,在第二实例中,至少一段手臂骨架的仿形臂筒32的骨架关节J_frm还可以进一步集成在仿形臂筒32的端部之间(上游级联端和下游级联端之间)的扭转关节J_tor(扭转轴线与仿形臂筒32的臂筒轴线同轴布置),其中,用于驱动扭转关节的关节驱动电机与该扭转关节之间同样可以利用关节同步带机构(关节同步带机构60的又一种集成形态)实现至少两级减速传动。
例如,肩部仿形臂筒321的肩部主臂筒321a与肩部铰接盘321b之间,可以通过形成有肩部扭转关节J_tor_321的肩部扭转盘910(例如肩部法兰盘)连接,以使得该肩部扭转关节J_tor_321的扭转轴线与肩部仿形臂筒321(肩部主臂筒321a)的臂筒轴线同轴布置;上臂仿形臂筒322的第一上臂主臂筒322b和第二上臂主臂筒322c之间,可以通过形成有上臂扭转关节J_tor_322的上臂扭转盘920(例如上臂转接盘)同轴连接,以使得该上臂扭转关节J_tor_322的扭转轴线与上臂仿形臂筒322(第一上臂主臂筒322b和第二上臂主臂筒322c)的臂筒轴线同轴布置;前臂仿形臂筒323的第一前臂主臂筒323b和第二前臂主臂筒323c之间,可以通过形成有前臂扭转关节J_tor_323的前臂扭转盘930(例如前臂转接盘)同轴连接,以使得该前臂扭转关节J_tor_323的扭转轴线与前臂仿形臂筒323(第一前臂主臂筒323b和第二前臂主臂筒323c)的臂筒轴线同轴布置。
在图15以及图16a和图16b中,以扭转盘900通用地表示肩部扭转盘910、上臂扭转盘920以及前臂扭转盘930,并且以装设于扭转盘900的关节同步带机构60实现两级减速(k为2)为例。但可以理解的是,只要同步带轮组多于两组,则也可以实现多于两级减速,在此情况下:
非传动末级的每组同步带轮组60_Gi(i大于等于1且小于k)的输出带轮60_Gi_c都可以通过安装螺钉991、带轮轴承992、定位垫片993以及安装螺母994而与下一级同步带轮组60_Gi+1的输入带轮60_Gi+1_a同轴装设在扭转盘900的偏心位置处;
并且,传动末级的一组同步带轮组60_Gk的输出带轮60_Gk_c与位于扭转盘900的盘心位置的输出轴承990同轴装配。即,位于传动末级的同步带轮组60_Gk的输出带轮60_Gk_c装设于仿形臂筒32的端部之间的扭转盘900,以形成扭转轴线平行于仿形臂筒32的臂筒轴线(与仿形臂筒32的臂筒轴线同轴部署)的扭转关节J_tor。
作为另一种变形方案,关节同步带机构60在扭转盘900用于实现扭转关节J_tor的部署方式,也可以适用于在铰接盘(肩部铰接盘321b、臂肘铰接盘322d以及腕部铰接盘323d)实现摆转关节J_swg的部署。
可以理解的是,第一实例和第二实例并不意图对机械手臂20的形态做不必要的限制,关节同步带机构60的集成形态同样不限于第一实例和第二实例的实例化结构。通过第一实例和第二实例的举例说明,应当理解以关节同步带机构60实施减速而实现的轻量化和低成本化的设计,可以适用于机械手臂20的不同形态。
另外,为了进一步提高服务机器人的整体轻量化和整体低成本化的效果,升降滑块72沿纵向滑轨71的线性运动,也可以由升降驱动电机(由于隐藏在支撑立柱70内而未在附图中示出)通过至少一级减速传动的升降同步带机构(由于隐藏在支撑立柱70内而未在附图中示出)驱动,即,避免使用齿轮减速器或谐波减速器。
类似地,若云台机构80具有调节高位探测机构12的视野角度的功能,即,云台机构80可以云台驱动电机的动力输出(受控于手臂控制器)而调节高位探测机构12的位姿,则,云台机构80与云台驱动电机之间同样可以通过至少一级减速传动的云台同步带机构连接,而不使用齿轮减速器或谐波减速器。
图17为如图1所示实施例中的服务机器人的云台机构的装配结构示意图。图18为如图17所示的云台机构的分解状态示意图。请参见图17和图18,云台机构80可以为高位探测机构12的视场提供水平调节(绕平转转轴C_scan_hor)和仰俯调节(绕仰俯转转轴C_scan_ver)的两个调节自由度。具体地,云台机构80可以包括固定装设在支撑立柱70的顶端的云台基座81、以及可水平转动(绕平转转轴C_scan_hor)地装设于云台基座81的云台悬架82,高位探测机构12可仰俯转动(绕仰俯转转轴C_scan_ver)地装设于云台悬架82。
云台基座81的内部装设有第一云台驱动电机581和云台同步带机构中的平转同步带轮组68_G1,其中,第一云台驱动电机581的输出轴与平转同步带轮组68_G1的平转输入带轮68_G1_a,平转同步带68_G1_b张紧在平转输入带轮68_G1_a和平转输出带轮68_G1_c之间,平转输出带轮68_G1_c连接传动轴810,例如通过间隔布置的第一平转轴承811和第二平转轴承812与传动轴810同轴连接。
该传动轴810从云台基座81的内部向下竖直探出,并且,该传动轴810的轴线为平转转轴C_scan_hor。
云台悬架82挂接在传动轴810的端部下方,以随传动轴810的旋转而绕平转转轴C_scan_hor水平转动。并且,云台悬架82装设有第二云台驱动电机582、云台同步带机构中的仰俯同步带轮组68_G2,其中,第二云台驱动电机582的输出轴与仰俯同步带轮组68_G2的仰俯输入带轮68_G2_a,仰俯同步带68_G2_b张紧在仰俯输入带轮68_G2_a和仰俯输出带轮68_G2_c之间,仰俯输出带轮68_G2_c连接安装托架820的转轴部820a,例如,转轴部820a和仰俯输出带轮68_G2_c可以通过销轴823同轴装设在第一仰俯轴承821和第二仰俯轴承822之间,并且,销轴823的端部可以装设销钉824,以将转轴部820a和仰俯输出带轮68_G2_c轴向锁止在第一仰俯轴承821和第二仰俯轴承822之间。
该转轴部820a的轴线为仰俯转转轴C_scan_ver,并且,安装托架820还具有从转轴部820a的径向方向探出的托盘部820b,该托盘部820b可以随转轴部820a的转动而绕仰俯转转轴C_scan_ver仰俯转动。
从而,当高位探测机构12装设于托盘部820b时,可以实现基于平转同步带轮组68_G1的减速传动的水平转动、以及基于仰俯同步带轮组68_G2的减速传动的仰俯转动,以实现视场的水平调节(绕平转转轴C_scan_hor)和仰俯调节(绕仰俯转转轴C_scan_ver)。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
- 用于环锭纺纱机的服务机器人、环锭纺纱机和服务机器人的操作方法
- 服务机器人导航路径跟踪方法及服务机器人