连杆椰子摘果机械手
文献发布时间:2023-06-19 12:19:35
技术领域
本发明属于农业机械设备技术领域,涉及一种摘果设备,具体是一种连杆椰子摘果机械手。
背景技术
椰子是种热带水果,棕榈科椰子属植物,原产于亚洲东南部、印度尼西亚至太平洋群岛,我国广东南部诸岛及雷州半岛、海南、台湾及云南南部热带地区均有栽培,尤其是海南热代农业的主要特产。由于椰子汁水清甜果肉鲜美,深受人们的喜爱,而且椰子除了汁水、果肉可以食用以外,外衣、椰壳等部位还可产生其他的商用价值,所以椰子亦是具有极高的经济价值。
随着海南的椰子种植面积在不断的增多,使海南的椰子产业得到蓬勃发展。目前,在海南的椰子摘果还是靠传统的人工作业,通过工人用长钩摘取或是爬上椰子树砍割,但是长钩摘取只能针对个别低矮的椰子树,由于椰子树普遍高度较高,无法使用长钩摘取,否则果实从树上掉落容易摔坏,只能依靠工人爬树砍割摘果,而人工摘果过程繁琐,需要工人爬上椰子树,然后在进行摘取,由于个人无法携带太多椰子,所以摘取到一定数量就要爬下树放置,否则难以携带,无法继续摘取,而且摘椰子的工作耗费时长,工人长时间工作的情况下,爬树摘果时需加倍小心,否则容易出现摔伤、砍摘椰子时容易误伤自身,由此可见,海南传统的椰子摘果方法较为落后,还无法实现机械化,从而成为影响椰子产业发展的一大因素,因此实现海南椰子摘果机械化作业是椰子产品发展的必由之路。
发明内容
本发明是针对现有技术的不足而提供一种连杆椰子摘果机械手,采用机械手与控制电路的配合,可实现机械化采摘椰子果,无需工人爬树采摘,有效降低摘果劳动强度,提高椰子摘果效率,且通过支架与抓爪的配合,可抓住椰果,有效保护摘取的椰果,防止椰果摔落损坏,降低椰子在摘取时的破损率。
本发明所采用的技术方案:
一种连杆椰子摘果机械手,包括由控制电路控制的抓杆,所述抓杆设计为电动伸缩杆结构,在抓杆上设置伸缩开关和松紧开关,伸展开关与松紧开关与控制电路连接,通过伸缩开关可以控制抓杆的伸展状态,在抓杆的伸缩端上设置支架,支架设计为喇叭状,可便于采摘时容纳椰果,在支架内并排设置固定片与弹性片,固定片与弹性片均与控制电路连接,在支架上环绕活动设置数个抓爪,使抓爪可张合,可在采摘时包裹以及松放椰果,在抓爪的对应位置均设置推杆和由控制电路控制的传动机构,推杆贯穿设置在支架上的支撑导向杆连接,且传动机构与推杆连接,传动机构可带动推杆水平往返移动,且支撑导向杆起到保持推杆移动方向的作用,推杆通过启动装置与抓爪连接,通过抓杆将支架套住椰子,椰子在进入支架时抵住弹性片,使弹性片向固定片靠拢贴合,从而接通转动机构的控制电路,使传动机构运作,在传动机构的带动下,推杆向前移动时可以通过推动启动装置使抓爪聚拢,当推杆推动启动装置至下止点时,使抓爪完全包裹椰子,并触发启动装置启动抓杆的控制电路同时断开传动机构的控制电路,使传动机构停止运作,且抓杆开始回缩,将椰子从茎干上扯下,最后按下松紧开关接通传动机构控制电路,使控制传动机构运作,将推杆向后移动,使抓爪张开,从而松开椰子,达到采摘椰子的目的;
所述启动装置包括罩板、固定板和连接杆,罩板设置在抓爪上,且罩板顶部用弹性材料制成,并通过连接杆与推杆连接,连接杆分别与罩板、推杆活动连接,当推杆在传动机构带动下水平位移时,可推动连接杆下压罩板或是拉动连接杆拉升罩板,从而达到将抓爪聚拢或张开的效果,固定板设置在罩板内部,且罩板与固定板均与控制电路连接,当推杆在传动机构的带动下移动时,则会带动连接杆下压罩板,将抓爪向下伸出合拢,从而使抓爪完全包裹椰子,以此同时,在推杆的带动下,连接杆将罩板的顶部下压,罩板的顶部受力过大而弯曲触碰固定板,使抓杆的控制电路启动,使抓杆回缩,将椰果从茎干上扯下,达到采摘椰果的目的。
进一步的,所述传动机构是齿轮传动机构,由推杆电机、齿条和圆柱齿轮组成,推杆电机为双向电机,推杆电机的输出端与圆柱齿轮通过转轴连接,齿条与圆柱齿轮通过相匹配的螺纹啮合连接,且齿条与推杆连接,当弹性片与固定片贴拢时,通过控制电路使推杆电机正转,从而圆柱齿轮带动齿条将推杆向前推出,达到将连接杆向下压的目的,使抓爪并拢,在抓爪并拢的同时,连接杆在推杆的作用下,使罩板顶部触碰固定板,启动抓杆控制电路的同时将传动机构的控制电路断开,使抓爪停止运动并将抓杆回缩,达到将椰子果实扯下的目的。
进一步的,所述支架上设有固定钢圈,用于加固支架的稳定性。
在摘椰时,将抓杆伸至椰果处,然后通过摁下伸缩开关,启动抓杆电路,将抓杆伸缩端伸出至椰子果处,使抓爪套住椰子,当椰子进入抓爪后,椰子触碰弹性片,使弹性片与固定片贴合,启动传动机构电路,断开抓杆电路,使传动机构运作将推杆向前推进,将连接杆斜向下推动下压罩板,从而使抓爪并拢,当连接杆下压罩板至下止点时,罩板的顶部在连接杆的作用下与固定板贴合,启动抓杆电路,断开传动机构电路,使抓杆回缩,将椰子扯下,最后摁下松紧开关,启动传动机构电路,断开抓杆电路,通过传动机构将推杆往回拉,使抓爪张开,将椰子放开,完成采摘。
本发明结构简单、制作成本低,采用机械手与控制电路的配合,可实现机械化采摘椰子果,无需工人爬树采摘,有效降低摘果劳动强度,提高椰子摘果效率,且通过支架与抓爪的配合,可抓住椰果,有效保护摘取的椰果,防止椰果摔落损坏,降低椰子在摘取时的破损率,具有操作便捷、采摘效率高以及安全性高等特点。
附图说明
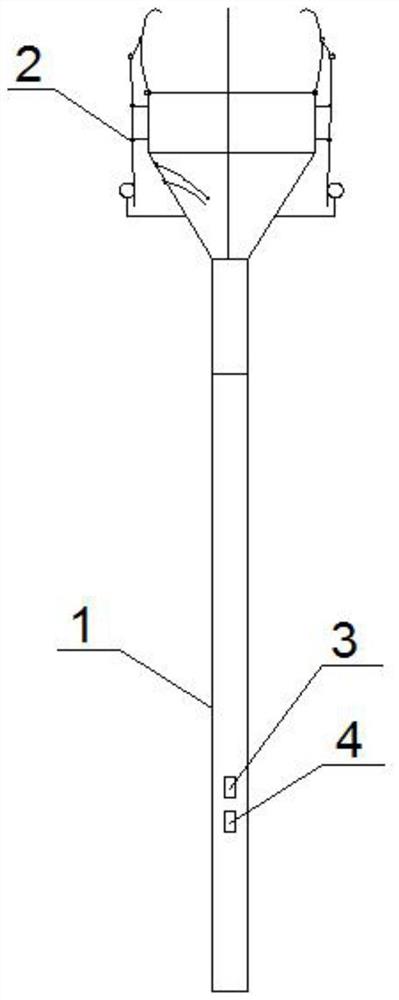
图1为本发明结构示意图。
图2为本发明支架结构示意图。
图3为本发明传动机构结构示意。
图4为本发明抓爪结构示意图。
图中:1、抓杆;2、支架;3、松紧开关;4、伸展开关;2-1、传动机构;2-2、推杆;2-3、支撑导向杆;2-4、连接杆;2-5、启动装置;2-6、抓爪;2-7、固定钢圈;2-8、弹性片;2-9、固定片;2-1-1、推杆电机;2-1-2、圆柱齿轮;2-1-3、齿条;2-5-1、罩板;2-5-2、固定板。
具体实施方式
下面结合附图和通过实施例对本发明作进一步说明,但不作为本发明的限定。
在图1、所示的结构中,本发明提供的连杆椰子摘果机械手,包括由控制电路控制的抓杆1,所述抓杆1设计为电动伸缩杆结构,在抓杆1上设置伸缩开关4和松紧开关3,伸展开关4与松紧开关3与控制电路连接,在抓杆1的伸缩端上设置支架2,支架2设计为喇叭状,所述支架2上设有固定钢圈2-7,在支架2内并排设置固定片2-9与弹性片2-8,固定片2-9与弹性片2-8均与控制电路连接,在支架2上环绕活动设置数个抓爪2-6,在抓爪2-6的对应位置均设置推杆2-2和由控制电路控制的传动机构2-1,推杆2-2贯穿设置在支架2上的支撑导向杆2-3连接,且传动机构2-1与推杆2-2连接,推杆2-2通过启动装置2-5与抓爪2-6连接,所述传动机构2-1是齿轮传动机构,由推杆电机2-1-1、齿条2-1-3和圆柱齿轮2-1-2组成,推杆电机2-1-1为双向电机,推杆电机2-1-1的输出端与圆柱齿轮2-1-2通过转轴连接,齿条2-1-3与圆柱齿轮2-1-2通过相匹配的螺纹啮合连接,且齿条2-1-3与推杆2-2连接;
所述启动装置2-5包括罩板2-5-1、固定板2-5-2和连接杆2-4,罩板设置在抓爪2-6上,且罩板2-5-1顶部用弹性材料制成,并通过连接杆2-4与推杆2-2连接,连接杆2-4分别与罩板2-5-1、推杆2-2活动连接,固定板2-5-2设置在罩板2-5-1内部,且罩板2-5-1与固定板2-5-2均与控制电路连接。
在摘椰时,将抓杆伸至椰果处,然后通过摁下伸缩开关,启动抓杆电路,将抓杆伸缩端伸出至椰子果处,使抓爪套住椰子,当椰子进入抓爪后,椰子触碰弹性片,使弹性片与固定片贴合,启动传动机构电路,断开抓杆电路,使传动机构运作将推杆向前推进,将连接杆斜向下推动下压罩板,从而使抓爪并拢,当连接杆下压罩板至下止点时,罩板的顶部在连接杆的作用下与固定板贴合,启动抓杆电路,断开传动机构电路,使抓杆回缩,将椰子扯下,最后摁下松紧开关,启动传动机构电路,断开抓杆电路,通过传动机构将推杆往回拉,使抓爪张开,将椰子放开,完成采摘。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 连杆椰子摘果机械手
- 连杆椰子摘果机械手