低频水声通信的模态间干扰抑制方法
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及低频水声通信的模态间干扰抑制方法,属于水声通信技术领域。
背景技术
水声通信是海洋环境监测及海洋信息获取的重要信息交互手段。低频水声信道表现出簇稀疏大时延扩展特性,这将会导致严重的码间干扰,进而造成通信性能的恶化。
判决反馈均衡器是目前针对水声信道信号处理的最有效的处理手段之一,但由于水声信道变化规律复杂,常规的判决反馈均衡器很难达到理想效果。为了使均衡器更好的适应信道的时变特性,产生了自适应判决反馈均衡器,并得到广泛应用。自适应判决反馈均衡器利用自适应算法迭代的更新均衡器系数,来跟踪信道的变化,可获得更为准确的滤波结果。
由于低频信道的模态间干扰使其具有的簇稀疏特性,利用传统水声信道的稀疏性设计的算法在均衡处理中很难获得优异性能。而现有自适应算法中的恒定步长参数使信号处理的收敛速度和稳态性能二者不能兼优,降低了自适应均衡处理性能。
发明内容
针对现有水声信道信号采用恒定步长参数的自适应判决反馈均衡器进行调整,信号处理的收敛速度和稳态性能不能兼顾的问题,本发明提供一种低频水声通信的模态间干扰抑制方法。
本发明的一种低频水声通信的模态间干扰抑制方法,包括,
在训练模式下,将已知训练序列进行延时,得到期望信号d(k);
同时,使已知训练序列经信道传输,在信道输出端得到输出信号向量r(k),输出信号向量r(k)经前馈滤波器进行前馈滤波得到a
再将期望信号d(k)输入反馈滤波器,经反馈滤波得到b
计算获得均衡器的输出
所述均衡器包括前馈滤波器和反馈滤波器;
再计算获得判决误差e(k):
根据判决误差e(k)自适应修正前馈滤波器和反馈滤波器的系数以对信道进行补偿,获得修正后的均衡器;
将修正后的均衡器用于跟踪模式下,实现低频水声通信的模态间干扰抑制;
跟踪模式下,反馈滤波器的当前输入为前一次信号迭代过程中判决装置输出的判决值,所述判决值为判决装置对均衡器的输出
根据本发明的低频水声通信的模态间干扰抑制方法,
所述输出信号向量r(k)表示为:
r(k)=h
式中s(k)为跟踪模式下输入信号,h(k)为信道冲击响应。
根据本发明的低频水声通信的模态间干扰抑制方法,
跟踪模式下,均衡器的输出为
式中y(k)为判决装置输出的判决值。
根据本发明的低频水声通信的模态间干扰抑制方法,
根据判决误差e(k)自适应修正前馈滤波器和反馈滤波器的系数的过程包括:
所述前馈滤波器和反馈滤波器的系数利用自适应步长簇稀疏算法计算得到,所述自适应步长簇稀疏算法的代价函数ξ为:
ξ=||η(k)||
式中η(k)为迭代误差:
η(k)=w(k+1)-w(k),
w(k)为均衡器系数向量,w(k)=[a(k),b(k)],
S1(k)为均衡器输入信号矩阵,
S1(k)=[r(k),r(k-1),…,r(k-L+1)],
式中L是投影阶数;
λ为遗忘因子;f
对代价函数ξ求梯度获得稀疏约束下自适应步长簇稀疏算法的迭代公式:
w(k+1)=w(k)+μ(k)S1(k)R(k)e(k)+γ
式中μ(k)为自适应步长,R(k)为相关矩阵;
R(k)=(S1
式中ψ为正数,取值范围为0至10
e(k)为跟踪模式下的判决误差向量:
e(k)=d(k)-y(k);
γ
A(k)为设定的等效变量:
A(k)=S1(k)R(k)S1
Γ(w(k))为簇稀疏约束函数,
根据本发明的低频水声通信的模态间干扰抑制方法,
滤波器的自适应步长μ(k)的迭代过程包括:
计算正则步长γ
定义滤波器系数瞬时误差v(k)为:
v(k)=w
式中w
计算获得滤波器系数瞬时误差平方:
式中υ(k)为系统噪声,Γ(k)为约束函数的梯度,
定义与传统AP算法相比,约束后算法系数的均方误差多出项C(γ
为保证约束类算法的最优性能,正则步长γ
对C(γ
式中tr(A(k))表示A(k)的迹,N为滤波器长度,η表示约束函数的上界;
由此得到正则步长γ
在迭代过程中,取正则步长
根据本发明的低频水声通信的模态间干扰抑制方法,
约束函数f
式中G为模态的个数,β为范数拟合参数,
根据本发明的低频水声通信的模态间干扰抑制方法,
自适应步长根据自适应迭代判决误差e(k)计算:
将判决误差e(k)作为先验估计误差改写为:
e(k)=S1
即无噪声先验误差e
e
由此,定义后验误差ε(k):
ε(k)=S1
式中ε
最优步长的选取以无噪声后验误差均方值最小化为准则,利用
E[||ε
式中E表示求期望;
对步长取梯度的极值确定μ(k)的极小值,得到自适应步长算法的迭代方程:
式中e
e
式中D∈R
a(k)是由a
E[||e
E[||e
λ满足λ<1且λ≈1。
本发明的有益效果:本发明方法中包括自适应判决反馈均衡和自适应步长簇稀疏自适应算法。本发明方法可解决常规均衡器无法利用水声低频信道簇稀疏特性和常规自适应算法步长参数的折中选取的问题;同时,本发明利用模态频散导致的信道簇稀疏特性和输入信号的统计特性构造自适应步长簇稀疏算法,基于判决反馈均衡器改进了自适应算法,提高了低频水声信道自适应均衡处理的性能。
在仿射投影(Affined Project,AP)算法的基础上,提出了自适应步长簇稀疏算法。不仅在传统算法的代价函数中引入了组合范数l
本发明提出了基于自适应步长簇稀疏约束算法的判决反馈均衡器结构,能够有效抑制低频水声通信的模态间干扰问题,提高通信解调性能。
本发明方法利用信道特征和输入信号统计信息等先验信息改进传统自适应算法,能够提高低频信道下自适应判决反馈均衡处理性能,抑制低频信道的模态间干扰。浅海低频信道的多模态现象可以被看作簇稀疏信道。本发明方法尝试在自适应算法的代价函数中加入l
附图说明
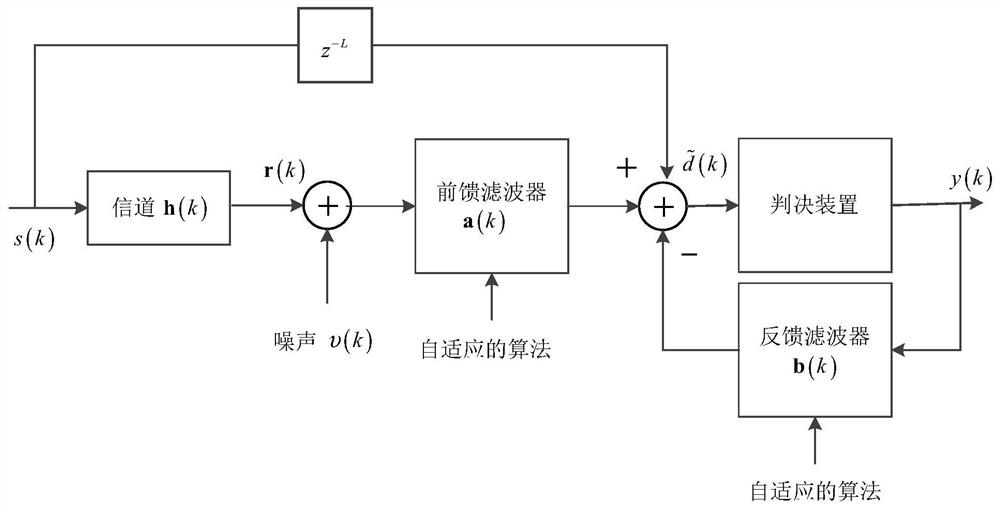
图1是本发明所述低频水声通信的模态间干扰抑制方法的流程框图;图中Z
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
具体实施方式一、结合图1所示,本发明提供了一种低频水声通信的模态间干扰抑制方法,包括,
在训练模式下,将已知训练序列进行延时,得到期望信号d(k);
同时,使已知训练序列经信道传输,在信道输出端得到输出信号向量r(k),输出信号向量r(k)经前馈滤波器进行前馈滤波得到a
再将期望信号d(k)输入反馈滤波器,经反馈滤波得到b
对信道输出端的信号处理过程如图1所示。自适应均衡器的本质利用自适应算法迭代估计一个信道的逆滤波器来补偿通信系统中传输信道导致的失真。在数字通信系统中,在均衡器后面可以放置一个判决装置去识别当前时刻的码元。自适应均衡器一般包含两种工作模式,即训练模式和跟踪模式。在训练模式,均衡器将通过递归算法来评估信道特性,并且利用预先设定的训练序列的延迟与自适应滤波器输出结果之间的关系,修正滤波器系数以对信道做出补偿,以便均衡器的系数可以做出正确的设置。这样就可以在接收到训练序列时,均衡器的滤波系数已经接近最佳值。典型的训练序列是一个二进制伪随机信号或是一串预先指定的数据序列,而紧跟在训练序列后被传送的是传输数据。在训练模式,反馈滤波器的输入为发送端发送的训练序列真值。
计算获得均衡器的输出
所述均衡器包括前馈滤波器和反馈滤波器;
再计算获得判决误差e(k):
根据判决误差e(k)自适应修正前馈滤波器和反馈滤波器的系数以对信道进行补偿,获得修正后的均衡器;
将修正后的均衡器用于跟踪模式下,实现低频水声通信的模态间干扰抑制;
跟踪模式下,反馈滤波器的当前输入为前一次信号迭代过程中判决装置输出的判决值,所述判决值为判决装置对均衡器的输出
本实施方式中,发送端首先发送信号用以与接收端建立链接,接收端得到输出信号向量r(k),用以进行解调处理;在接收端,利用已知训练序列与判决反馈均衡器输出值得到滤波器输出误差e(k);均衡器中前馈滤波器的系数a(k)和反馈滤波器的系数b(k)利用自适应算法计算得到;自适应算法的迭代根据信道特征和输入信号统计特性构造。
进一步,结合图1所示,所述输出信号向量r(k)表示为:
r(k)=h
式中s(k)为跟踪模式下输入信号,h(k)为信道冲击响应。
再进一步,跟踪模式下,均衡器的输出为
式中y(k)为判决装置输出的判决值。
在跟踪模式时,自适应滤波器输出与判决装置输出之间误差将用来更新抽头系数,以跟踪不断变化的信道。此时,反馈滤波器的输入则利用上一次迭代的输出的判决值得到。
通常均衡器的抽头间隔为符号速率的倒数。当信道特性未知时,接收滤波器有时是匹配于发送信号脉冲的,通常这种方法导致均衡器性能对抽样时间的选择非常敏感。此时,可以选择分数间隔均衡器来补偿接收信号的信道失真。通过以奈奎斯特速率处理抽样值,能使均衡器系数补偿在一个符号间隔内的任何定时相位。从性能的观点看,分数间隔均衡器等价于一个匹配滤波器跟随一个符号速率抽样器,具有对抽样时刻不敏感的特征。对于处理同步点不准确的情况,该方法会优于符号间隔均衡器。由于模态内频散会导致脉冲展宽,仅通过匹配滤波很难准确确定通信信号的起始点。因此,本发明中的前馈滤波器选用分数阶均衡器。
自适应判决反馈均衡器中前馈滤波器和反馈滤波器是自适应滤波器。自适应滤波器依赖递归算法进行运算,经过一些成功的迭代后自动调节自身参数以收敛于某种统计意义上的维纳解。这使得它在不能获得必要的输入信号统计信息的情况下,尽可能的获得完美的滤波处理。一旦输入信息发生变化,自适应滤波器还能跟踪这种变化,自动调节参数使其成功恢复收敛状态。自适应均衡器的核心是自适应算法。由于AP算法的学习性能比一般的LMS算法好而需要的计算量又比RLS算法少,本发明选择其作为改进算法基础。
再进一步,根据判决误差e(k)自适应修正前馈滤波器和反馈滤波器的系数的过程包括:
所述前馈滤波器和反馈滤波器的系数利用自适应步长簇稀疏算法计算得到,所述自适应步长簇稀疏算法(改进AP算法)的代价函数ξ为:
ξ=||η(k)||
式中η(k)为迭代误差:
η(k)=w(k+1)-w(k),
w(k)为均衡器系数向量,w(k)=[a(k),b(k)],
S1(k)为均衡器输入信号矩阵,
S1(k)=[r(k),r(k-1),…,r(k-L+1)],
式中L是投影阶数;
λ为遗忘因子;f
对代价函数ξ求梯度获得稀疏约束下自适应步长簇稀疏算法的迭代公式:
w(k+1)=w(k)+μ(k)S1(k)R(k)e(k)+γ
式中μ(k)为自适应步长,R(k)为相关矩阵;
R(k)=(S1
式中ψ为正数,取值范围为0至10
e(k)为跟踪模式下的判决误差向量:
e(k)=d(k)-y(k);
γ
A(k)为设定的等效变量:
A(k)=S1(k)R(k)S1
Γ(w(k))为簇稀疏约束函数,
自适应算法的迭代根据信道特征和输入信号统计特性构造。为了在自适应算法的迭代过程中刻画信道的簇稀疏特征,最常采用的方法就是在自适应算法的代价函数中增加能够衡量向量簇稀疏特性的约束函数,如Γ(w(k))。
再进一步,滤波器的自适应步长μ(k)的迭代过程包括:
自适应算法的迭代根据信道特征和输入信号统计特性构造。稀疏约束的正则化参数由滤波器迭代误差的瞬时平方确定。
计算正则步长γ
定义滤波器系数瞬时误差v(k)为:
v(k)=w
式中w
计算获得滤波器系数瞬时误差平方:
式中υ(k)为系统噪声,Γ(k)为约束函数的梯度,
定义与传统AP算法相比,约束后算法系数的均方误差多出项C(γ
为保证约束类算法的最优性能,正则步长γ
对C(γ
式中tr(A(k))表示A(k)的迹,N为滤波器长度,η表示约束函数的上界;
由此得到正则步长γ
在迭代过程中,取正则步长
所述AP算法为步长簇稀疏算法。
再进一步,约束函数f
满足
在此基础上,对于l
式中G为模态的个数,β为范数拟合参数,
再进一步,自适应步长μ(k)根据瞬时自适应迭代判决误差e(k)计算:
将判决误差e(k)作为先验估计误差改写为:
e(k)=S1
即无噪声先验误差e
e
由此类似的,定义后验误差ε(k):
ε(k)=S1
式中ε
最优步长的选取以无噪声后验误差均方值最小化为准则,利用
E[||ε
式中E表示求期望;
对步长取梯度的极值确定μ(k)的极小值,得到自适应步长算法的迭代方程:
根据CS理论中的收缩降噪方法,式中e
e
式中D∈R
a(k)是由a
E[||e
E[||e
λ满足λ<1且λ≈1。
本发明方法从利用水声信道的簇稀疏特性和避免步长参数的折衷选取这两方面入手,改进了传统的AP自适应算法,与判决反馈均衡处理技术结合,提高了自适应判决反馈均衡器抑制低频水声通信的模态间干扰的能力。
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。
- 低频水声通信的模态间干扰抑制方法
- 低频水声通信的模态间干扰抑制方法