一种基于区域相似性的图像去雾方法及系统
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及数字图像处理技术领域,具体涉及一种基于区域相似性的图像去雾方法及系统。
背景技术
雾是近地面大气中由悬浮小水滴等凝华所形成的一种天气现象。雾天条件会给人们的生产生活带来诸多不便,特别是在成像方面,由于雾天空气中诸如PM2.5等众多小颗粒对光的散射影响,导致成像设备所拍摄的图像出现细节丢失、对比度降低、亮度下降、图像色彩整体偏灰白等问题,不仅降低了用户的视觉体验,也会对图像识别等相关领域工作系统的正常运作造成一定的影响。因此,对图像去雾的研究具有极为重要的价值与意义。
在有雾等恶劣天气条件下,光在传播过程中遇到悬浮在空中的微小颗粒时将发生散射,致使成像设备所采集的图像产生退化效果。Nayer和Narasimhan在1999年改进了大气散射模型,该模型在计算机视觉和计算机图形学中广泛应用。其模型可描述为公式(1):
I(X)=J(X)t(X)+A(1-t(X)) (1)
其中,I(X)表示成像设备所拍摄出的雾天图像,J(X)表示I(X)所对应的无雾图像,A为大气环境光值,t(X)为透射率,t(X)可由公式(2)表示:
t(X)=e
其中,β是大气散射系数,d(X)是场景深度,即图像场景点与被拍摄点之间的距离。根据公式(1)可知,该去雾算法在对拍摄的雾天图像I(X)估算大气环境光值A和透射率t(X)后,即可得到无雾图像J(X)。
公告号为CN107481199B的中国发明专利公开了一种图像去雾处理方法、装置、存储介质和移动终端,所述方法包括:获取待处理图像;获取所述待处理图像中每一个像素对应的暗通道值,并统计在预设范围内的暗通道值的数量;若所述数量超过阈值,则根据预设去雾方式对所述待处理图像进行去雾处理。上述图像去雾处理方法、装置、存储介质和移动终端,在对待处理图像进行去雾之前,根据暗通道值判断是否满足预设条件,满足预设条件的待处理图像才进行去雾处理,避免对所有图像都进行去雾处理。该发明在去雾过程中使用了大气散射模型,提高了图像处理的效率,降低了图像处理装置的功耗。但是,其对大气环境光值和透射率的估计过于简单,导致去雾效果不理想,无法满足高要求条件下对图像进行去雾,得到更为清晰的图像。
发明内容
为解决以上技术问题,本发明提供了一种基于区域相似性的图像去雾方法及系统。
本发明的第一方面提供一种基于区域相似性的图像去雾方法,所述方法包括步骤:
S1:进行图像R、G、B图层的暗通道值估计,得到暗通道矩阵;
S2:基于区域相似性进行大气环境光值估计,得到大气环境光优化值;
S3:基于导向滤波进行R、G、B图层的透射率值估计,得到R、G、B图层的透射率优化值;
S4:使用大气散射模型还原清晰图像,得到去雾后的图像。
优选的是,步骤S1中,对于大小为m×n的有雾图像,分别针对其R、G、B图层,取每个像素点X在Φ(X)大小范围内的方形窗口邻域中的最低灰度值作为该像素点X的暗通道值,得到R、G、B图层的暗通道矩阵J
J
J
其中,Y表示像素点X的Φ(X)大小范围内的方形窗口中的像素点,J
上述任一方案优选的是,步骤S2包括:
S21:对于像素点X,选取其方形窗口邻域区内的所有像素点的暗通道值的均值作为该像素点X的大气环境光值A
S22:选取所有像素点的A
S23:使用区域相似性方法,根据步骤S22中得到的maxA′
上述任一方案优选的是,步骤S21中,所述方形窗口邻域区为以像素点X作为左上角或者右上角或者左下角或者右下角选取的大小范围为Ω(X)的方形窗口邻域区。
上述任一方案优选的是,步骤S21中,对于图像边界处的像素点,若选取的方形窗口的大小不足Ω(X),则以边长min{x,y,m-x+1,n-y+1}选取方形窗口,其中x、y分别为像素点X的横纵坐标,
上述任一方案优选的是,步骤S23中,记所有像素点的A
上述任一方案优选的是,步骤S3中,基于不同波长可见光具有不同透射率的原理,对不同颜色图层分别求取优化前的透射率矩阵
其中ω为常数,I
上述任一方案优选的是,步骤S3中,R、G、B图层的透射率优化值
其中,
上述任一方案优选的是,步骤S4中,根据步骤S2中得到的大气环境光优化值A′c(X)和步骤S3中得到的R、G、B图层的透射率优化值
J(X)={J
其中,
本发明的第二方面提供一种基于区域相似性的图像去雾系统,所述系统包括存储介质,所述存储介质内存储有计算机程序,所述计算机程序用于被处理器执行以实现所述基于区域相似性的图像去雾方法。
本发明的基于区域相似性的图像去雾方法及系统利用大气散射模型以及暗通道先验知识,将大气散射模型中的大气环境光值通过使用区域相似性算法进行优化估计,并结合不同波长的光在传输过程中损失程度不同的特征对R、G、B图层的透射率进行优化估计,从而完成大气散射模型中的关键输入参数的优化,得到去雾后的图像。本发明的基于区域相似性的图像去雾方法及系统可以更好地还原非均质雾霾条件下图像,在去雾处理后获得更清晰的图像,解决了恶劣天气下成像设备的成像质量难以保证,传统方法处理后图像颜色失真,整体颜色发蓝、偏暗等情况的问题,能为恶劣天气条件下自动驾驶视觉系统、道路情况监测系统及其他图像采集系统等提供技术支持。
附图说明
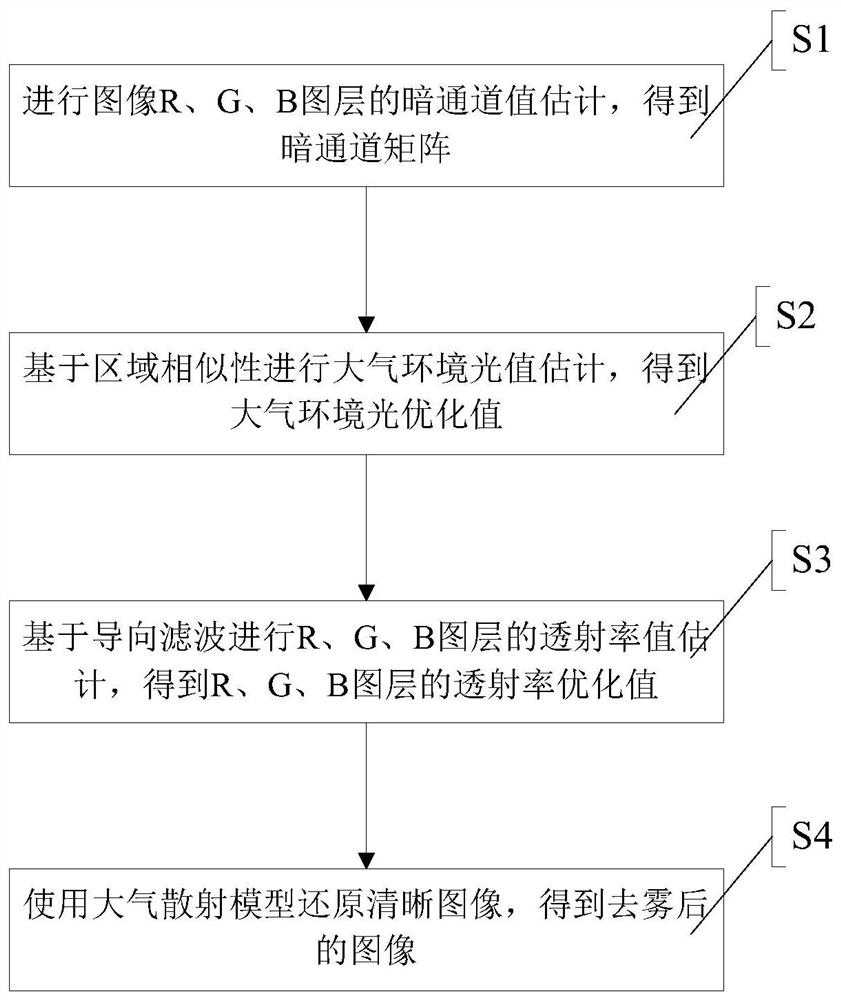
图1为按照本发明的基于区域相似性的图像去雾方法的一优选实施例的流程示意图。
具体实施方式
为了更好地理解本发明,下面结合具体实施例对本发明作详细说明。
实施例1
如图1所示,一种基于区域相似性的图像去雾方法,所述方法包括步骤:
S1:进行图像R、G、B图层的暗通道值估计,得到暗通道矩阵;
S2:基于区域相似性进行大气环境光值估计,得到大气环境光优化值;
S3:基于导向滤波进行R、G、B图层的透射率值估计,得到R、G、B图层的透射率优化值;
S4:使用大气散射模型还原清晰图像,得到去雾后的图像。
步骤S1中,对于大小为m×n的有雾图像,分别针对其R、G、B图层,取每个像素点X在Φ(X)大小范围内的方形窗口邻域中的最低灰度值作为该像素点X的暗通道值,得到R、G、B图层的暗通道矩阵J
J
J
其中,Y表示像素点X的Φ(X)大小范围内的方形窗口邻域中的像素点,J
所述方形窗口邻域区为以像素点X为邻域中心的Φ(X)大小范围内的方形窗口该方形窗口Φ(X)的边长取值范围为11~51个像素点。确定暗通道矩阵J
步骤S2包括:
S21:对于像素点X,选取其方形窗口邻域区内的所有像素点的暗通道值的均值作为该像素点X的大气环境光值A
S22:选取所有像素点的A
S23:使用区域相似性方法,根据步骤S22中得到的maxA′
步骤S21中,所述方形窗口邻域区为以像素点X作为左上角或者右上角或者左下角或者右下角选取的大小范围为Ω(X)的方形窗口邻域区,所述方形窗口Ω(X)的边长取值范围为11~51个像素点。在本实施例中,以像素点X为左上角选取方形窗口邻域区确定该像素点X的大气环境光值A
其中,J
在本实施例中,步骤S22中,所述N为图像像素点总数的1%取整后所得的正整数,取整方式为向下取整,即
其中,h
步骤S23中,记所有像素点的A
步骤S3中,基于不同波长可见光具有不同透射率的原理,对不同颜色图层分别求取优化前的透射率矩阵
其中ω为常数,I
其中,
步骤S4中,根据步骤S2中得到的大气环境光优化值A
J(X)={J
其中,
一种基于区域相似性的图像去雾系统,所述系统包括存储介质,所述存储介质内存储有计算机程序,所述计算机程序用于被处理器执行以实现所述基于区域相似性的图像去雾方法。
需要说明的是,以上实施例仅用于说明本发明的技术方案,而非对其限制;尽管前述实施例对本发明进行了详细的说明,本领域的技术人员应该理解:其可以对前述实施例记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,而这些替换,并不使相应技术方案的本质脱离本发明技术方案的范围。
- 一种基于区域相似性的图像去雾方法及系统
- 基于人眼视觉相似性约束的图像去雾方法、系统及设备