一种消毒机器人的控制方法、控制装置和消毒机器人
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及机器人技术领域,特别是涉及一种消毒机器人的控制方法、控制装置和消毒机器人。
背景技术
目前,诸如COVID-19等流行病已严重扩散。与此同时,其他一些具有高传染性的致命病毒也对人类构成巨大威胁。在这种情况下,医务人员不得不频繁地对高传染性的关键区域进行消毒。然而,医务人员暴露在外部环境中执行消毒工作会增加感染风险。
目前已经出现了一些简单的消毒机器人,可以代替人类执行消毒工作。消毒机器人以机器人为载体,在机器人内部布置消毒系统产生扩散的消毒气体,能有效地杀灭空气中的致病微生物。消毒机器人能够根据设定的路线自动、高效、精准地进行消毒防疫。
目前的消毒机器人普遍缺乏视觉传感机制,控制人员需要在可见距离内跟随机器人以目视操控机器人,难以保证操作人员的安全性。
发明内容
本发明实施方式提出一种消毒机器人的控制方法、控制装置和消毒机器人。
本发明实施方式的技术方案如下:
一种消毒机器人的控制方法,包括:
采集消毒机器人所在环境的图像数据;
当从所述图像数据中识别出预定目标时,生成提示信息;
发射所述图像数据和所述提示信息。
因此,本发明实施方式可以发射消毒机器人所在环境的图形数据并针对预定目标给出提示,从而提高消毒工作的安全性。
在一个实施方式中,还包括:
检测所述消毒机器人与所述预定目标的距离值;
检测所述预定目标的温度值;
发射所述距离值和所述温度值。
可见,本发明实施方式可以发送消毒作业的关键参数,便于用户了解消毒机器人的现场状况。
在一个实施方式中,所述消毒机器人包含;可移动平台;储液桶,装设在所述可移动平台上,适配于储存消毒液;M个托架,分别装设在所述可移动平台上,其中每个托架具有N个自由度;M个雾化喷嘴,分别固定在一一对应的托架上;其中N和M为至少为2的正整数;该方法还包括:
接收针对所述预定目标的消毒命令;
基于所述消毒命令控制至少一个托架在各自自由度中的至少一个自由度上移动;
控制固定在所述至少一个托架上的雾化喷嘴雾化喷射储液桶中的消毒液。
因此,本发明实施方式基于针对托架移动的控制操作,可以控制多个雾化喷嘴的雾化喷射,提高了消毒工作的灵活性。
在一个实施方式中,所述基于所述消毒命令控制至少一个托架在各自自由度中的至少一个自由度上运动包括:移动所述至少一个托架,以使得分别固定在所述至少一个托架上的至少一个雾化喷嘴能够分别喷射所述预定目标的不同部分。
可见,本发明实施方式可以实现多个雾化喷嘴对预定目标的不同部分的各自消毒。
在一个实施方式中,所述基于所述消毒命令控制至少一个托架在至少一个自由度上运动包括;移动所述至少一个托架,以使得分别固定在所述至少一个托架上的至少一个雾化喷嘴能够分别喷射所述预定目标,其中所述至少一个雾化喷嘴在所述预定目标上的喷射区域存在重合。
可见,本发明实施方式可以实现多个雾化喷嘴对预定目标的重合消毒。
在一个实施方式中,所述基于所述消毒命令控制至少一个托架在至少一个自由度上运动包括;移动所述至少一个托架,以使得分别固定在所述至少一个托架上的至少一个雾化喷嘴能够分别喷射所述预定目标和所述预定目标的周边环境。
因此,本发明实施方式可以实现多个雾化喷嘴对预定目标和周边环境的分别消毒。
一种消毒机器人的控制装置,包括:
采集模块,用于采集消毒机器人所在环境的图像数据;
识别模块,用于当从所述图像数据中识别出预定目标时,生成提示信息;
通信模块,用于发射所述图像数据和所述提示信息。
因此,本发明实施方式可以发射消毒机器人所在环境的图形数据并针对预定目标给出提示,从而提高消毒工作的安全性。
在一个实施方式中,还包括:
距离检测模块,用于检测与所述预定目标的距离值;
温度检测模块,用于检测所述预定目标的温度值;
其中所述通信模块,还用于发射所述距离值和所述温度值。
可见,本发明实施方式可以发射消毒作业的关键参数,便于用户了解消毒机器人的现场状况。
在一个实施方式中,所述消毒机器人包含;可移动平台;储液桶,装设在所述可移动平台上,适配于储存消毒液;M个托架,分别装设在所述可移动平台上,其中每个托架具有N个自由度;M个雾化喷嘴,分别固定在一一对应的托架上;其中N和M为至少为2的正整数;
所述通信模块,还用于接收针对所述预定目标的消毒命令;该装置还包括:
控制模块,用于基于所述消毒命令控制至少一个托架在各自自由度中的至少一个自由度上运动;控制固定在所述至少一个托架上的雾化喷嘴雾化喷射储液桶中的消毒液。
因此,本发明实施方式基于对托架移动的控制操作,可以控制多个雾化喷嘴的雾化喷射,提高了消毒工作的灵活性。
在一个实施方式中,所述控制模块,用于移动所述至少一个托架,以使得分别固定在所述至少一个托架上的至少一个雾化喷嘴能够分别喷射所述预定目标的不同部分。
可见,本发明实施方式可以实现多个雾化喷嘴对预定目标的不同部分的各自消毒。
在一个实施方式中,所述控制模块,用于移动所述至少一个托架,以使得分别固定在所述至少一个托架上的至少一个雾化喷嘴能够分别喷射所述预定目标,其中所述至少一个雾化喷嘴在所述预定目标上的喷射区域存在重合。
可见,本发明实施方式可以实现多个雾化喷嘴对预定目标的重合消毒。
在一个实施方式中,所述控制模块,用于移动所述至少一个托架,以使得分别固定在所述至少一个托架上的至少一个雾化喷嘴能够分别喷射所述预定目标和所述预定目标的周边环境。
因此,本发明实施方式可以实现多个雾化喷嘴对预定目标和周边环境的分别消毒。
一种消毒机器人,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上任一项所述的消毒机器人的控制方法。
因此,本发明实施方式还提出了一种具有存储器-处理器架构的消毒机器人。
一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上任一项所述的消毒机器人的控制方法。
因此,本发明实施方式还提出了一种包含用于执行消毒机器人的控制方法的计算机程序的计算机可读存储介质。
附图说明
图1为本发明的消毒机器人的模块图。
图2为本发明的消毒机器人的示范性立体图。
图3为本发明的消毒机器人控制系统的示范性结构图。
图4为本发明的消毒机器人控制系统的示范性结构图。
图5为本发明的消毒机器人控制方法的示范性流程图。
图6为本发明的消毒机器人控制装置的示范性结构图。
图7为本发明具有存储器-处理器架构的消毒机器人控制装置的示范性结构图。
其中,附图标记如下:
具体实施方式
为了使本发明的技术方案及优点更加清楚明白,以下结合附图及实施方式,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以阐述性说明本发明,并不用于限定本发明的保护范围。
为了描述上的简洁和直观,下文通过描述若干代表性的实施方式来对本发明的方案进行阐述。实施方式中大量的细节仅用于帮助理解本发明的方案。但是很明显,本发明的技术方案实现时可以不局限于这些细节。为了避免不必要地模糊了本发明的方案,一些实施方式没有进行细致地描述,而是仅给出了框架。下文中,“包括”是指“包括但不限于”,“根据……”是指“至少根据……,但不限于仅根据……”。由于汉语的语言习惯,下文中没有特别指出一个成分的数量时,意味着该成分可以是一个也可以是多个,或可理解为至少一个。
申请人经过研究,发现:现有技术中的消毒机器人缺乏视觉传感机制,控制人员需要在可见距离内跟随机器人以目视操控机器人,难以保证操作人员的安全性。而且,现有技术中的消毒机器人通常布置相对于可移动平台不可移动的、单个雾化喷嘴,只能依靠可移动平台的运动调节雾化喷嘴的喷洒角度,喷洒覆盖范围不广,并由此导致消毒作业缺乏灵活性。
首先,本发明提出一种消毒机器人,其雾化喷嘴可以随着托架具有多个自由度,从而提高消毒工作的灵活性。
图1为本发明的消毒机器人的模块图。图2为本发明的消毒机器人的示范性立体图。
由图1和图2可见,消毒机器人10包括:
可移动平台11;
储液桶12,装设在可移动平台11上,适配于储存消毒液;
托架13,装设在可移动平台11上,具有N个自由度,其中N为至少为2的正整数;
雾化喷嘴14,固定在托架13上,适配于将储液桶12中的消毒液雾化喷出。
在这里,可移动平台11是消毒机器人10的主体部分。可移动平台11具体可以实施为由驱动电机所驱动的履带式可移动平台或轮式可移动平台,等等。
储液桶12装设(优选为可拆卸的)在可移动平台11上。储液桶12用于储存消毒液。比如,消毒液可以实施为八四消毒液、过氧乙酸、来苏水、漂白粉、高锰酸钾,等等。
以上示范性描述了可移动平台11和消毒液的典型实例,本领域技术人员可以意识到,这种描述仅是示范性的,并不用于限定本发明实施方式的保护范围。
在本发明实施方式中,在可移动平台11上装设有托架13。托架13具有N个自由度,其中N为至少为2的正整数。而且,雾化喷嘴14固定在托架13上。
因此,当托架13移动时,雾化喷嘴14可以随着托架13一起移动。相应地,雾化喷嘴14也具有N个自由度。
优选地,N的取值区间为[2,6]。当N为6时,6个自由度包括沿图2所示的三维坐标系中,沿x、y、z三个直角坐标轴方向的移动自由度以及绕这三个直角坐标轴的转动自由度。
可见,本发明的雾化喷嘴14可以随着托架13具有多个自由度,从而提高消毒工作的灵活性。
具体地,雾化喷嘴14可以将储液桶12中的消毒液雾化喷出,从而执行消毒工作。比如,布置在储液桶12中的泵,将储液桶12中的消毒液挤压进入雾化喷嘴14中。在雾化喷嘴14的内部布置有铁片,高速流动的消毒液撞击在铁片上,反弹后形成雾化颗粒,并通过雾化喷嘴14的出口喷出。
在具体实施中,雾化喷嘴14、托架13和储液桶12的数目,都可以为一或多个。
比如,在一个实施方式中,雾化喷嘴14、托架13和储液桶12的数目都为一个。消毒机器人10还包括:穿过托架13的导管(图1和图2中没有示处)。,导管的第一端伸入到储液桶12中,导管的第二端伸入到雾化喷嘴14中。布置在储液桶12中的泵,经由导管将储液桶12中的消毒液挤压进入雾化喷嘴14。
在一个实施方式中,雾化喷嘴14和托架13的数目为M,雾化喷嘴14和托架13一一对应,其中M为至少为2的正整数,储液桶12的数目为一个。消毒机器人10还包括:M个导管,其中每个导管穿过对应的托架13。每个导管的第一端伸入到储液桶12中,每个导管的第二端伸入到对应的雾化喷嘴14中。此时,M个雾化喷嘴14经由各自的导管,分别从共同的储液桶12中获取消毒液。
在一个实施方式中,雾化喷嘴14、托架13和储液桶12的数目为K个,雾化喷嘴14、托架13和储液桶12一一对应,其中K为至少为2的正整数。消毒机器人10还包括:K个导管,其中每个导管穿过对应的托架13。每个导管的第一端伸入到对应的储液桶12中,每个导管的第二端伸入到对应的雾化喷嘴14中。此时,K个雾化喷嘴14经由各自的导管,分别从各自的储液桶12中获取消毒液。
优选地,N等于2;其中托架13绕可移动平台11的宽度方向(如图2三维坐标系中的y轴)具有转动自由度,并绕可移动平台11的高度方向(如图2三维坐标系中的z轴)具有转动自由度。因此,固定在托架13上的雾化喷嘴14绕可移动平台11的宽度方向具有转动自由度,并绕可移动平台11的高度方向具有转动自由度,此时雾化喷嘴可以实现俯仰喷射和水平喷射。优选地,当雾化喷嘴14的数目为2个,每个雾化喷嘴14绕可移动平台11的宽度方向具有转动自由度,并绕可移动平台11的高度方向具有转动自由度时,可以在消毒工作的灵活性与控制复杂度之间取得良好折中。
在一个实施方式中,消毒机器人还包括:第一电机(图1和图2中没有示出),装设在托架13上,适配于驱动托架13绕可移动平台11的宽度方向转动;第二电机(图1和图2中没有示出),装设在托架13上,适配于驱动托架13绕可移动平台11的高度方向上转动。
由图2可见,托架13可以装设在可移动平台11的第一端部;储液桶12,可拆卸地装设在可移动平台11的第二端部,其中第一端部和第二端部形成相对端部。本发明实施方式的储液桶12优选布置在可移动平台11的端部,从而便于拆卸储液桶12。
在一个实施方式中,消毒机器人10还包括:视觉传感器15,装设在可移动平台11上;测距传感器16,装设在可移动平台11上;温度传感器17,装设在可移动平台11上;可编程逻辑控制器(PLC)18,装设在可移动平台11的内部空间中,与视觉传感器15、测距传感器16和温度传感器17分别连接;通信模块19,装设在可移动平台11的内部空间中,与PLC18连接,适配于与遥控器20具有通信连接。
优选地,视觉传感器15,用于采集消毒机器人所在环境的图像数据;PLC18,用于当从图像数据中识别出预定目标时,生成提示信息;测距传感器16,用于确定与预定目标的距离;温度传感器17,用于检测预定目标的温度;通信模块19,用于发送提示信息及包含距离和温度的参数值,比如发送到遥控器20。
视觉传感器15可以实施为一或多个摄像头,比如实施为可见光摄像机,红外摄像机,等等。视觉传感器15持续采集消毒机器人所在环境的图像数据。预定目标可以为垃圾桶、手术台、防护服等特定对象。在PLC18中预先保存预定目标的模板图像或特征参数,等等。当PLC18基于匹配模板图像或特征参数,从图像数据中识别出预定目标时,生成诸如语音提示、文字提示或图形提示等提示信息。比如,语音提示为音频格式的“发现垃圾桶”、文字提示为文本格式的“发现垃圾桶”、图形提示为将预定目标轮廓高亮标出的提示框,等等。
通信模块19基于与遥控器20之间的通信连接,将视觉传感器15提供的消毒机器人所在环境的图像数据、PLC18提供的提示信息、测距传感器16提供的距离值和温度传感器17提供的温度值中的一或多个,发送到遥控器20。
通信模块19通过无线接口或有线接口将数据发送到遥控器20。比如,有线接口包括下列中至少一个:通用串行总线接口、控制器局域网接口、串口,等等;无线接口包括下列中至少一个:红外接口、近场通讯接口、蓝牙接口、紫蜂接口、无线宽带接口,第三代移动通信接口、第四代移动通信接口、第五代移动通信接口,等等。
遥控器20中可以包含显示屏,以显示消毒机器人所在环境的图像数据、PLC18提供的提示信息、测距传感器16提供的距离值和温度传感器17提供的温度值中的一或多个,从而用户无需跟随机器人即可以了解与消毒作业相关的关键信息。
而且,通信模块19,还用于从遥控器20接收消毒命令;PLC18,还用于基于消毒命令控制托架13在N个自由度中的至少一个自由度上运动,并当托架13运动到目标点时控制雾化喷嘴14将储液桶12中的消毒液雾化喷出。
举例(1):消毒命令具体实施为:用于指示雾化喷嘴14最大程度地覆盖预定目标的最大覆盖消毒命令。
此时,PLC18控制每个托架关于该预定目标的各自运动,以使得该预定目标被喷射的范围最大。比如,当雾化喷嘴14的数目为两个时,PLC18可以控制这两个雾化喷嘴14的喷射方向都覆盖预定目标且最大程度地不重合。
举例(2):消毒命令具体实施为:用于指示雾化喷嘴14集中为预定目标执行消毒工作的集中覆盖消毒命令。
此时,PLC18控制每个托架关于该预定目标的各自运动,以使得该预定目标被喷射的强度最大。比如,当雾化喷嘴14的数目为两个时,可以控制这两个雾化喷嘴14的喷射方向尽量重合到预定目标的中心。
举例(3):消毒命令具体实施为:用于指示某个(或某些)雾化喷嘴14对准预定目标、其它雾化喷嘴14对准预定目标的周边环境的主辅消毒命令。
此时,PLC18控制每个托架关于该预定目标的各自运动,以使得该预定目标被至少一个雾化喷嘴喷射,且该预定目标的周边环境被除该至少一个雾化喷嘴之外的雾化喷嘴喷射。比如,当雾化喷嘴14的数目为三个时,可以控制一个雾化喷嘴14的喷射方向对准预定目标的中心,其它两个雾化喷嘴14的喷射方向则对准预定目标的周边环境。
以上示范性描述了消毒命令的典型实例,本领域技术人员可以意识到,这种描述仅是示范性的,并不用于限定本发明实施方式的保护范围。
基于上述描述,本发明还提出了消毒机器人控制系统。
图3为本发明的消毒机器人控制系统的示范性结构图。
如图3所示,该系统包括:
如图1和图2所示的消毒机器人10,包括:可移动平台11;储液桶12,装设在可移动平台11上,适配于储存消毒液;托架13,装设在可移动平台11上,具有N个自由度,其中N为至少为2的正整数;雾化喷嘴14,固定在托架13上,适配于将储液桶12中的消毒液雾化喷出;视觉传感器15,装设在可移动平台11上;PLC18,装设在可移动平台11的内部空间中,与视觉传感器15连接;通信模块19,与PLC18连接;
遥控器20,与通信模块19具有无线通信连接。
在一个实施方式中,遥控器20包含显示屏。可以在显示屏上显示与消毒作业相关的关键信息。
针对图3所示的包含双雾化喷嘴的消毒机器人,图4为本发明的消毒机器人控制系统的示范性结构图。
在图4中,遥控器20与布置在消毒机器人上的车载控制部分40具有通信连接。
车载控制部分40包括PLC18及布置在消毒机器人的可移动平台中间的视觉传感器15。车载控制部分40还包括:布置在可移动平台前端的前摄像头151、布置在消毒机器人后端的后摄像头152及布置在雾化喷嘴上的喷嘴摄像头153。
视觉传感器15,用于采集依据可移动平台中间视角所检测的周边环境的第一图像数据;前摄像头151,用于采集消毒机器人的前部环境的第二图像数据;后摄像头152,用于采集消毒机器人的后部环境的第三图像数据;喷嘴摄像头153,用于采集雾化喷嘴视角的第四图像数据。
这四路图像数据分别通过各自的传输通道(Ch1-Ch4)被发送到视频编码器154。视频编码器154将这四路图像数据编码(比如,执行视频及音频码率调整)为适于网络传输的视频数据,并发送视频数据到从视频传输模块155。从视频传输模块155经由第四天线46发射该视频数据。
遥控器20中的第二天线28接收到该视频数据,将该视频数据发送到主视频传输模块25。主视频传输模块25将该视频数据发送到视频解码器24。遥控器20中的视频解码器24解码该视频数据,并在显示屏21上显示该视频数据,从而便于用户了解消毒机器人所在的周边环境。
而且,PLC18对第一图像数据、第二图像数据、第三图像数据和第三图像数据执行图像识别处理,当可以从中识别出预定目标(比如,垃圾桶)时,生成诸如语音提示、文字提示或图形提示等提示信息。PLC18将提示信息发送到从数据传输模块156。从数据传输模块156经由第三天线45发射该提示信息。遥控器20中的第一天线27接收到该提示信息,将该提示信息发送到主视频传输模块25。主视频传输模块25将该提示信息发送到该开发板23(比如,STM32VE T6控制板),以由开发板23执行各种数据处理,比如在显示屏21上显示提示信息,等等。
当用户在显示屏21上触发各个控制按键时,开发板23生成相应的控制命令。比如,控制命令可以包含:针对机器人可移动平台的运动控制命令;针对雾化喷嘴的控制命令;针对机器人灯光的控制命令;针对机器人启动/关闭的命令,等等。主视频传输模块25经由第一天线发射该控制命令。从数据传输模块156经由第三天线45接收到该控制命令。PLC18处理该控制命令,并生成相应的控制输出信号。
当控制命令为针对机器人可移动平台的运动控制命令时,PLC18向电机控制器182发出相应的输出信号,以使得电机控制器182驱动可移动平台作出响应于该运动控制命令的动作。比如,电机控制器182驱动可移动平台前进、后退或转弯,等等。
当控制命令为针对雾化喷嘴的控制命令、针对机器人灯光的控制命令或针对机器人启动/关闭的命令时,PLC18向总线模块181转发该控制命令,以使得总线模块181生成响应于该运动控制指令的输出信号。比如,总线模块181生成:用于控制第一雾化喷嘴向上/向下移动的输出信号S1;用于控制第一雾化喷嘴向左/向右移动的输出信号S2;用于控制第二雾化喷嘴向上/向下移动的输出信号S3;用于控制第二雾化喷嘴向左/向右移动的输出信号S4;用于控制机器人灯光开启/关闭的输出信号S5;用于控制机器人开启/关闭的输出信号S6,等等。
遥控器电池21为遥控器20提供电能。消毒机器人的车载电池41为车载控制部分40提供电能。车载电池41的输出电压经由第一直流-直流(DC-DC)变换器42、第二DC-DC变换器43和第三DC-DC变换器44后,可以被变压为各种规格的输出电压,以为车载控制部分40的各个组成部分供电。比如,如图4所示,车载电池41的输出电压为48伏特,第一DC-DC变换器42的输出电压为24伏特,第二DC-DC变换器43的输出电压为12伏特,第三DC-DC变换器43的输出电压为5伏特。
PLC18还经由电压测量模块检测车载电池41、第一DC-DC变换器、第二DC-DC变换器43和第三DC-DC变换器44的各自输出电压是否正常。
以上以包含双雾化喷嘴的消毒机器人为例,对消毒机器人控制系统的结构进行示范性描述,本领域技术人员可以意识到,这种描述仅是示范性的,并不用于限定本发明实施方式的保护范围。
考虑到目前的消毒机器人普遍缺乏视觉传感机制,控制人员需要在可见距离内跟随机器人以目视操控机器人,难以保证操作人员的安全性的缺陷,本发明实施方式还提出了消毒机器人控制方法,该控制方法可以提高消毒工作的安全性。
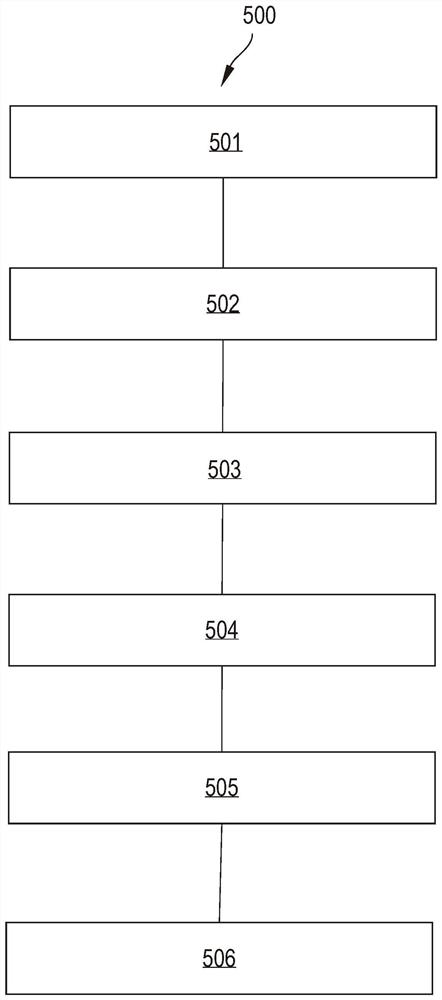
基于上述描述,图5为本发明的消毒机器人控制方法的示范性流程图。
如图5所示,该方法500包括:
步骤501:采集消毒机器人所在环境的图像数据。
在这里,可以利用布置在消毒机器人上的视觉传感器采集消毒机器人所在环境的图像数据。比如,视觉传感器可以布置在消毒机器人的可移动平台上。视觉传感器可以实施为一或多个摄像头,比如实施为可见光摄像机,红外摄像机,等等。优选地,视觉传感器实时性地采集消毒机器人所在环境的图像数据。
步骤502:当从图像数据中识别出预定目标时,生成提示信息。
在这里,预定目标可以为垃圾桶、手术台、防护服等特定对象。利用布置在消毒机器人上的控制器(优选为PLC),基于图像识别算法从图像数据中识别预定目标。
比如,在控制器中预先保存预定目标的模板图像或特征参数,等等。当控制器基于匹配模板图像或特征参数,利用图像识别算法从图像数据中识别出预定目标时,生成诸如语音提示、文字提示或图形提示等提示信息。举例,语音提示为音频格式的“发现垃圾桶”、文字提示为文本格式的“发现垃圾桶”、图形提示为将预定目标轮廓高亮标出的提示框,等等。
步骤503:发射图像数据和提示信息。
在这里,可以利用布置在消毒机器人上的通信模块发射图像数据和提示信息。比如,向包含显示屏的遥控器发送图形数据和提示信息,以由遥控器在显示屏中展示图形数据和提示信息,从而可以呈现环境信息,并针对预定目标给出提示,提高消毒工作的安全性。
比如,假定消毒机器人所在环境为手术室,则用户可以在遥控器的显示屏中浏览手术室的场景。而且,可以进一步在遥控器的显示屏中,针对垃圾桶、手术台、防护服等特定对象做出特别提示,从而便于用户决定是否针对特定目标执行消毒处理。
在一个实施方式中,该方法还包括:检测消毒机器人与预定目标的距离值;检测预定目标的温度值;发射距离值和温度值。
在这里,布置在消毒机器人上的距离传感器检测消毒机器人与预定目标的距离值,布置在消毒机器人上的温度传感器检测预定目标的温度值,布置在消毒机器人上的通信模块发射距离值和温度值。而且,通信模块可以向包含显示屏的遥控器发送距离值和温度值,以由遥控器在显示屏中展示距离值和温度值,从而便于用户了解预定目标的关键参数。
当消毒机器人包含多个具有自由度的雾化喷嘴时,还可以对这多个雾化喷嘴进行精细控制,从而提高消毒工作的灵活性。比如,可以针对图1-图2所示的消毒机器人进行控制。
在一个实施方式中,消毒机器人包含;可移动平台;储液桶,装设在可移动平台上,适配于储存消毒液;M个托架,分别装设在可移动平台上,其中每个托架具有N个自由度;M个雾化喷嘴,分别固定在一一对应的托架上;其中N和M为至少为2的正整数;该方法还包括:
步骤504:接收针对预定目标的消毒命令。
在这里,布置在消毒机器人上的通信模块接收针对预定目标的消毒命令。比如,从遥控器接收该消毒命令。
步骤505:基于消毒命令控制至少一个托架在各自自由度中的至少一个自由度上移动。
在这里,控制器基于消毒命令控制至少一个托架在各自自由度中的至少一个自由度上移动,以将至少一个托架分别移动到符合该消毒命令的目标位置。
步骤506:控制固定在至少一个托架上的雾化喷嘴雾化喷射储液桶中的消毒液。
在这里,当托架分别移动到各自的目标位置后,控制器控制固定在托架上的雾化喷嘴雾化喷射储液桶中的消毒液。
因此,消毒机器人的雾化喷嘴可以随着托架在多个自由度上受控移动,提高了消毒工作的灵活性。
在一个实施方式中,步骤505中基于消毒命令控制至少一个托架在各自自由度中的至少一个自由度上运动包括:移动至少一个托架,以使得分别固定在至少一个托架上的至少一个雾化喷嘴能够分别喷射预定目标的不同部分。
举例,假定预定目标为树木,消毒机器人包含2个托架,分别为托架A和托架B。绕可移动平台的宽度方向向上转动托架A,以使得固定在托架A上的雾化喷嘴可以喷射到树木的上半部分;绕可移动平台的宽度方向向下转动托架B,以使得固定在托架B上的雾化喷嘴可以喷射到树木的下半部分。
在一个实施方式中,步骤505中基于消毒命令控制至少一个托架在至少一个自由度上运动包括;移动至少一个托架,以使得分别固定在至少一个托架上的至少一个雾化喷嘴能够分别喷射预定目标,其中至少一个雾化喷嘴在预定目标上的喷射区域存在重合。
举例,假定预定目标为长度为1.6米的工作台,消毒机器人包含2个托架,分别为托架A和托架B。绕可移动平台的高度方向向左移动托架A,以使得固定在托架A上的雾化喷嘴可以喷射到工作台的左部分(对应的区间为0~1米);绕可移动平台的高度方向向右移动移动托架B,以使得固定在托架B上的雾化喷嘴可以喷射到工作台的右部分(对应的区间为0.6~1.6米)。
在一个实施方式中,步骤505中基于消毒命令控制至少一个托架在至少一个自由度上运动包括;移动至少一个托架,以使得分别固定在至少一个托架上的至少一个雾化喷嘴能够分别喷射预定目标和预定目标的周边环境。
举例,假定预定目标为贴近墙壁的垃圾桶,消毒机器人包含3个托架,分别为托架A、托架B和托架C。绕可移动平台的宽度方向移动托架A,以使得固定在托架A上的雾化喷嘴可以喷射垃圾桶;绕可移动平台的高度方向转动托架B以使得固定在托架B上的雾化喷嘴可以喷射到墙壁的左部分;绕可移动平台的高度方向转动托架C以使得固定在托架C上的雾化喷嘴可以喷射到墙壁的右部分。
以上示范性描述了控制托架在各自自由度上运动的典型实例,本领域技术人员可以意识到,这种描述仅是示范性的,并不用于限定本发明实施方式的保护范围。
本发明实施方式还提出了消毒机器人控制装置。
图6为本发明的消毒机器人控制装置的示范性结构图。
如图6所示,消毒机器人的控制装置600包括:
采集模块601,用于采集消毒机器人所在环境的图像数据;
识别模块602,用于当从图像数据中识别出预定目标时,生成提示信息;
通信模块603,用于发射图像数据和提示信息。
在一个实施方式中,还包括:距离检测模块604,用于检测与预定目标的距离;温度检测模块605,用于检测预定目标的温度;其中通信模块603,还用于发射距离值和温度值。
在一个实施方式中,消毒机器人包含;可移动平台;储液桶,装设在可移动平台上,适配于储存消毒液;M个托架,分别装设在可移动平台上,其中每个托架具有N个自由度;M个雾化喷嘴,分别固定在一一对应的托架上;其中N和M为至少为2的正整数;所述通信模块603,还用于接收针对预定目标的消毒命令;该装置600还包括:控制模块606,用于基于消毒命令控制至少一个托架在各自自由度中的至少一个自由度上运动;控制固定在至少一个托架上的雾化喷嘴雾化喷射储液桶中的消毒液。
在一个实施方式中,控制模块606,用于移动至少一个托架,以使得分别固定在至少一个托架上的至少一个雾化喷嘴能够分别喷射预定目标的不同部分。
在一个实施方式中,控制模块606,用于移动至少一个托架,以使得分别固定在至少一个托架上的至少一个雾化喷嘴能够分别喷射预定目标,其中至少一个雾化喷嘴在预定目标上的喷射区域存在重合。
在一个实施方式中,控制模块606,用于移动至少一个托架,以使得分别固定在至少一个托架上的至少一个雾化喷嘴能够分别喷射预定目标和预定目标的周边环境。
图7为本发明具有存储器-处理器架构的消毒机器人控制装置的示范性结构图。
如图7所示,消毒机器人700包括处理器701、存储器702及存储在存储器702上并可在处理器701上运行的计算机程序,所述计算机程序被所述处理器701执行时实现如上任一项所述的消毒机器人的控制方法。
其中,存储器702具体可以实施为电可擦可编程只读存储器(EEPROM)、快闪存储器(Flash memory)、可编程程序只读存储器(PROM)等多种存储介质。处理器701可以实施为包括一或多个中央处理器或一或多个现场可编程门阵列,其中现场可编程门阵列集成一或多个中央处理器核。具体地,中央处理器或中央处理器核可以实施为CPU或MCU或DSP等等。
需要说明的是,上述各流程和各结构图中不是所有的步骤和模块都是必须的,可以根据实际的需要忽略某些步骤或模块。各步骤的执行顺序不是固定的,可以根据需要进行调整。各模块的划分仅仅是为了便于描述采用的功能上的划分,实际实现时,一个模块可以分由多个模块实现,多个模块的功能也可以由同一个模块实现,这些模块可以位于同一个设备中,也可以位于不同的设备中。
各实施方式中的硬件模块可以以机械方式或电子方式实现。例如,一个硬件模块可以包括专门设计的永久性电路或逻辑器件(如专用处理器,如FPGA或ASIC)用于完成特定的操作。硬件模块也可以包括由软件临时配置的可编程逻辑器件或电路(如包括通用处理器或其它可编程处理器)用于执行特定操作。至于具体采用机械方式,或是采用专用的永久性电路,或是采用临时配置的电路(如由软件进行配置)来实现硬件模块,可以根据成本和时间上的考虑来决定。
本发明还提供了一种机器可读的存储介质,存储用于使一机器执行如本申请所述方法的指令。具体地,可以提供配有存储介质的系统或者装置,在该存储介质上存储着实现上述实施例中任一实施方式的功能的软件程序代码,且使该系统或者装置的计算机(或CPU或MPU)读出并执行存储在存储介质中的程序代码。此外,还可以通过基于程序代码的指令使计算机上操作的操作系统等来完成部分或者全部的实际操作。还可以将从存储介质读出的程序代码写到插入计算机内的扩展板中所设置的存储器中或者写到与计算机相连接的扩展单元中设置的存储器中,随后基于程序代码的指令使安装在扩展板或者扩展单元上的CPU等来执行部分和全部实际操作,从而实现上述实施方式中任一实施方式的功能。
用于提供程序代码的存储介质实施方式包括软盘、硬盘、磁光盘、光盘(如CD-ROM、CD-R、CD-RW、DVD-ROM、DVD-RAM、DVD-RW、DVD+RW)、磁带、非易失性存储卡和ROM。可选择地,可以由通信网络从服务器计算机或云上下载程序代码。
在本文中,“示意性”表示“充当实例、例子或说明”,不应将在本文中被描述为“示意性”的任何图示、实施方式解释为一种更优选的或更具优点的技术方案。为使图面简洁,各图中的只示意性地表示出了与本发明相关部分,而并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”并不表示将本发明相关部分的数量限制为“仅此一个”,并且“一个”不表示排除本发明相关部分的数量“多于一个”的情形。在本文中,“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”等仅用于表示相关部分之间的相对位置关系,而非限定这些相关部分的绝对位置。
以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种紫外线消毒机器人控制方法、控制装置及消毒机器人
- 智能消毒机器人消毒主控器及其消毒控制方法