一种快速三维重建系统和方法
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及一种三维重建系统和方法,尤其涉及一种快速三维重建系统和方法,属于计算机视觉技术领域。
背景技术
目前,双目立体视觉、运动恢复结构(SFM)和利用3D点云是进行三维重建的三种主要方式。双目立体视觉,即基于视差原理,利用成像设备从不同的方位获取被测物的两幅图像,通过识别图像对应点并基于三角测量原理计算各点深度,获取物体三维信息。该技术对物体表面纹理有一定的依赖,这为复杂环境下的三维重建工作带来了困难。此外,基于双目立体视觉的三维重建只能相对准确的还原成像设备所在一侧三维结构,而难以恢复出被测对象的完整三维结构。SFM方法是三维重建的另一种较为成熟的方式,它是一种距离成像方法,可以通过在场景周围不同点拍摄的一系列二维图像数据中估计三维结构。SFM方法适合于从某一高度通过大量重叠的图像构建3维场景的情况,或者通过移动传感器进行图像采集,然后重构物体结构,三维重建的前期需要对被重建的对象进行大量的图像采集,并且大量的图像处理工作需要高性能的硬件设备和算法支撑。3D点云建模法是利用深度相机或激光扫描传感器得到的3D点云进行物体的建模,3D点云能够直接反映出物体各个位置点高度,更加简单快速。
综上所述,SFM和双目立体视觉都需要在图像的基础上进行数学运算来得到物体的3维结构,属于一种间接的方法,双目立体视觉对物体表面纹理有一定的依赖,难以保证测量的准确性和鲁棒性。SFM对机器性能和算法要求较高,处理速度较慢,无法达到实时性的要求。基于深度相机的三维重建技术可以快速的表征被测对象的三维空间结构,相比很多其他方法和设备而言具有低廉的价格、较好的实时性和鲁棒性。因此,利用深度相机进行三维重建是一种良好的方式。
发明内容
本发明要解决的技术问题是提供一种快速三维重建系统和方法。
为解决上述技术问题,本发明所采取的技术方案一是:
一种快速三维重建系统,包括三个以上环绕被重建对象非平行架设的摄像设备;所述摄像设备能够同时获取彩色图像和深度图像包括三个以上环绕被重建对象非平行架设的摄像设备和主机;所述摄像设备能够同时获取彩色图像和深度图像,主机接收各摄像设备采集的图像,进行配准生成点云;所述摄像设备间的相对位姿已经标定。
进一步,摄像设备为三个kinect相机。
本发明所采取的技术方案二是:一种快速三维重建方法,包括以下步骤:
步骤1:摄像机标定:标定出摄像设备间的相对位姿;相对位姿包括内参和外参;
步骤2:采集图像:使用所述步骤1标定的各摄像设备同时采集被重建对象的彩色图像和深度图像;
步骤3:图像配准:配准各彩色图像和相应的深度图像;
步骤4:生成点云:逐摄像设备将配准后的图像在所述内参控制下转换成相应的分片点云;
步骤5:点云配准:将各摄像设备转换的点云在所述外参控制下配准成被重建对象的完整的三维点云;由以下具体步骤组成:
步骤5-1:初始匹配:利用所述步骤1中标定的外参进行各分片点云的初始配准;
步骤5-2:精细配准:选择一个分片点云作为基准片P,其他各分片点云依次作为数据集P’与基准片P迭代配准;当相邻两次迭代误差变化量小于设置的最小于欧氏距离均方差阈值γ或当迭代次数k大于预设的最大次数kmax时,停止迭代;每次迭代对于基准片P中的每个点,在数据集P’中找到距离其最近的点构成数据集Q;根据数据集P’和Q计算变换矩阵H;用变换矩阵H对数据集P’进行更新;计算基准片P中的每个点与其在更新后数据集P’中对应点间的欧氏距离,并计算本次误差及与上次迭代误差的变化量。
进一步,摄像设备为三个kinect相机。
采用上述技术方案所产生的有益效果在于:
(1)本发明可以通过非接触的方法,快速的对被测对象进行三维重建,不会对被测对象造成伤害。
(2)本发明快速准确,可以做到在线的实时三维重建。
附图说明
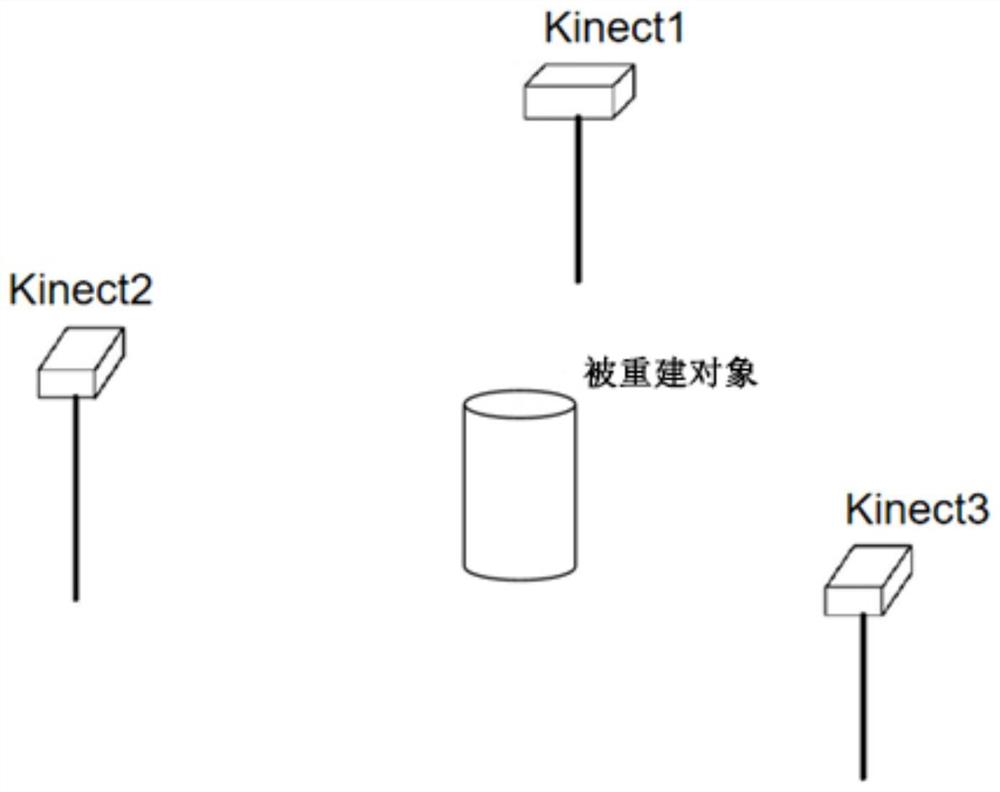
图1是本发明的系统结构示意图;
图2是本发明的方法流程图。
具体实施方式
实施例1:
一种快速三维重建系统,包括三个以上环绕被重建对象非平行架设的摄像设备和主机;所述摄像设备能够同时获取彩色图像和深度图像,主机接收各摄像设备采集的图像,进行配准生成点云;所述摄像设备间的相对位姿已经标定。
进一步,摄像设备为三个kinect相机。
实施例2:
一种快速三维重建方法,包括以下步骤:
步骤1:摄像机标定:标定出摄像设备间的相对位姿;相对位姿包括内参和外参;
步骤2:采集图像:使用所述步骤1标定的各摄像设备同时采集被重建对象的彩色图像和深度图像;
步骤3:图像配准:配准各彩色图像和相应的深度图像;
步骤4:生成点云:逐摄像设备将配准后的图像在所述内参控制下转换成相应的分片点云;
步骤5:点云配准:将各摄像设备转换的点云在所述外参控制下配准成被重建对象的完整的三维点云;由以下具体步骤组成:
步骤5-1:初始匹配:利用所述步骤1中标定的外参进行各分片点云的初始配准;
步骤5-2:精细配准:选择一个分片点云作为基准片P,其他各分片点云依次作为数据集P’与基准片P迭代配准;当相邻两次迭代误差变化量小于设置的最小于欧氏距离均方差阈值γ或当迭代次数k大于预设的最大次数kmax时,停止迭代;每次迭代对于基准片P中的每个点,在数据集P’中找到距离其最近的点构成数据集Q;根据数据集P’和Q计算变换矩阵H;用变换矩阵H对数据集P’进行更新;计算基准片P中的每个点与其在更新后数据集P’中对应点间的欧氏距离,并计算本次误差及与上次迭代误差的变化量。
- 一种快速三维重建系统和方法
- 一种基于光场数字重聚焦的快速三维重建方法及其系统