一种基于嗅探技术的车辆行人碰撞预警方法及装置
文献发布时间:2023-06-19 12:22:51
技术领域
本发明属于嗅探技术、RSSI测距技术领域,具体涉及一种基于嗅探技术的车辆行人碰撞预警方法及装置。
背景技术
传统的被动安全技术虽然能在事故发生时尽可能减小对驾驶员的伤害,但是并不能从根本上减少事故发生的概率。对于车辆行人碰撞预警系统,现有的研究成果还不够成熟,常见的同类方法主要有:基于视觉测距的预警方法、基于车载雷达或激光测距的预警方法。
基于视觉测距的预警方法在环境理想的情况下效果较好,但在环境较暗或者阴雨天的情况下,无法准确识别到车辆周围的目标,因此漏检率极高。传统的车载雷达测距是通过计算电磁波的往返时间实现的,因此适应性、稳定性都比较差且价格昂贵成本较高。
随着WiFi、蓝牙等技术的快速发展,为嗅探测距的准确率提供了良好的基础。无线终端会以主动扫描的方式定期向周围一定范围内的广播发送请求帧(Probe Request),告知无线访问接入点(Wireless Access Point,AP)自己的存在。探询请求帧包含无线终端唯一的媒体访问控制(Media Access Control,MAC)地址。因此,AP通过实时捕获无线终端广播的探询请求帧并从中解析出其唯一的MAC地址和RSSI值,根据RSSI值与距离转换公式可测得无线终端与AP的距离。
发明内容
针对现有技术存在的缺陷,本发明的目的是提供一种基于嗅探技术的车辆行人碰撞预警方法及装置。在低成本的情况下探测车辆周围的危险情况,对可能发生碰撞的情况发出语音提醒,降低事故发生的概率。
为达到上述目的,本发明采用如下技术方案:
一种基于嗅探技术的车辆行人碰撞预警方法,包括以下步骤:
1)在车辆上装载嗅探技术设备,使用1、6、11三个无重叠的频率范围信道侦听,实时捕获无线终端广播的ProbeRequest帧,从中解析出无线终端的MAC地址及RSSI值;
2)使用Kalman滤波算法,平滑随机噪声,并根据步骤1)得到的MAC地址及RSSI值对无线终端进行跟踪,预测其下一次走向;
3)根据信号接受强度与距离的转化公式,实时计算出无线终端与AP的相对距离;
4)进行自车车速检测,并根据驾驶员行为特性及汽车反应特性,计算随自车车速动态变化的安全预警距离;
5)对预警距离内嗅探技术到的无线终端MAC地址进行统计并预测其是否有碰撞可能性,对可能发生碰撞的目标发出语音提醒。
所述步骤1)使用的1、6、11信道经过大量实验证明,探询请求帧检测概率能达到80%以上,是嗅探技术方案中性价比最高的。
所述步骤2)中的Kalman滤波算法通以下公式实现:
状态预测:根据上一时刻的估计值以及当前时刻的系统控制输入,即当前的先验估计值是根据上一时刻的后验估计值得到的,状态预测方程为:
X(t|t-1)=AX(t-1|t-1)+BU(t)
P(t|t-1)=AP(t-1|t-1)A
其中X(t|t-1)为根据t-1时刻预测得到的t时刻的RSSI值,X(t-1|t-1)为t-1时刻的RSSI值;A、B为测量系统参数矩阵,U(t)为t时刻测量系统的控制量,P(t|t-1)为X(t|t-1)对应的协方差矩阵,P(t-1|t-1)为X(t-1|t-1)对应的协方差矩阵;A
状态更新:根据当前时刻的测量值得到当前状态的后验估计值;状态更新方程为:
X(t|t)=X(t|t-1)+Kg(t)(Z(t)-HX(t|t-1))
Kg(t)=P(t|t-1)H
P(t|t)=(I-Kg(t)H)P(t|t-1)
其中Kg(t)为Kalman滤波增益,Z(t)为t时刻RSSI值得测量值,H为测量系统的参数矩阵,H
所述步骤3)中的信号接受强度与距离的转化公式为:
[RSSI]dBm=A-10nlg(d)
其中[RSSI]dBm表示接收的信号强度,A表示AP距离无线终端1m时的信号强度,n表示信号传播常数;d表示无线终端与AP的距离。
所述步骤4)中的安全预警距离L模型为:
其中t
一种基于嗅探技术的车辆行人碰撞预警装置,其包括嗅探测距模块及动态安全预警距离计算模块,所述嗅探测距模块,对1,6,11三个无重叠的频率范围信道侦听,实时快速的捕获到附近无线终端的MAC地址及RSSI值,对获取到的RSSI值进行Kalman滤波处理,平滑随机噪声,预测无线终端的未来走向,根据距离转化公式计算AP与无线终端的距离;所述动态安全预警距离计算模块,首先检测自车车速,然后结合驾驶员行为特性、汽车反应特性,在车辆周围计算动态安全预警距离;最后实时统计预警距离内的无线终端数量并对可能发生碰撞的情况及时发出语音提醒。
与现有技术相比,本发明具有如下的突出的优点:
1.本发明将嗅探技术设备装载在车辆上,实时监听性1,6,11三个信道的探询请求帧,捕获周围无线终端的MAC地址及RSSI值,并对海量数据进行传输、分析和处理;
2.本发明基于捕获的无线终端RSSI值进行测距,相比于需要高维护成本和高造价的基站来说成本非常低;
3.当检测到车辆周围人员较为密集或目标距离小于某阈值且有靠近趋势时,发出语音提醒,辅助驾驶员及时采取措施。
附图说明
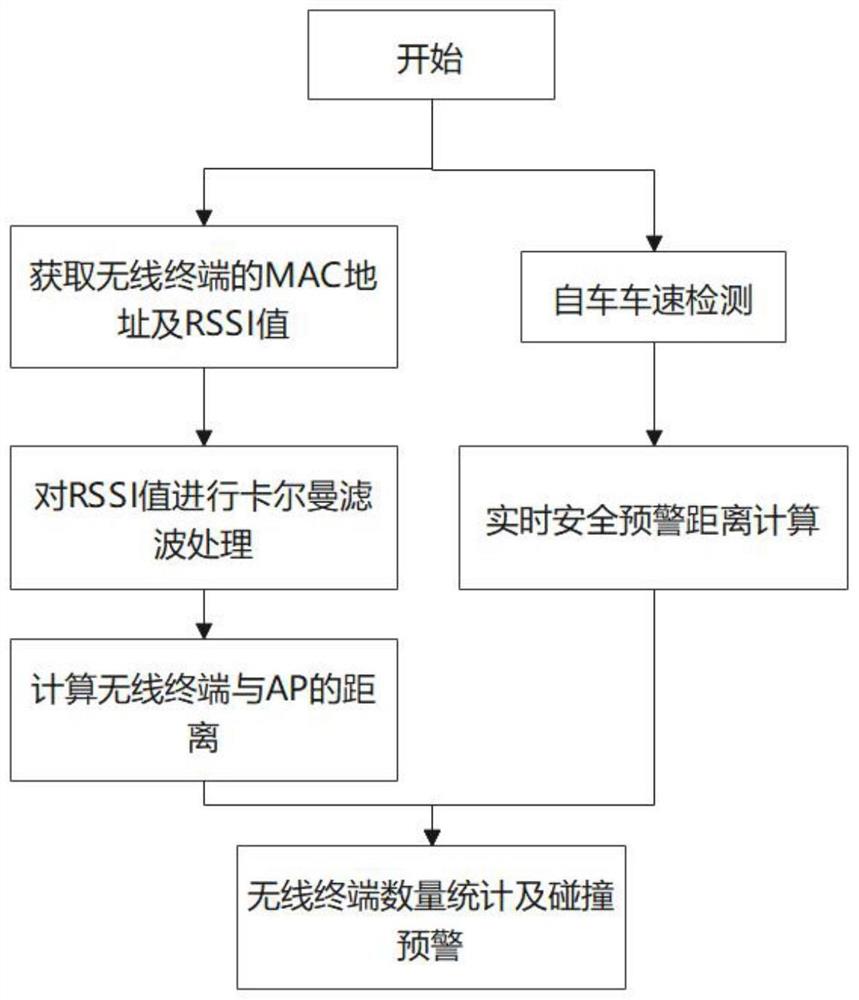
图1为本发明基于嗅探技术的车辆行人碰撞预警方法流程图。
图2为本发明实施例工作示意图。
具体实施方式
下面结合附图对本发明实施例作进一步的说明。
如图1所示,本发明实例公开的一种基于嗅探技术的车辆行人碰撞预警方法,包括以下步骤:
1)在车辆上装载嗅探技术设备,用性价比最高的1,6,11三个无重叠的频率范围信道侦听,实时捕获无线终端广播的Probe Request帧,从中解析出无线终端MAC地址及RSSI值,并对海量数据进行传输、分析和处理。
2)使用Kalman滤波算法,平滑随机误差,减少干扰噪声的影响,以得到的MAC地址及RSSI值为基础对无线终端进行跟踪,预测其下一次的走向。Kalman滤波分为状态预测和状态更新两个步骤,通过“预测—更新模型”的递归思想能够对目标的未来运动趋势做出有效预测,并通过不断优化回归使预测更加高效准确。
状态预测:根据上一时刻的估计值以及当前时刻的系统控制输入,即当前的先验估计值是根据上一时刻的后验估计值得到的,状态预测方程为:
X(t|t-1)=AX(t-1|t-1)+BU(t)
P(t|t-1)=AP(t-1|t-1)A
其中X(t|t-1)为根据t-1时刻预测得到的t时刻的RSSI值,X(t-1|t-1)为t-1时刻的RSSI值;A、B为测量系统参数矩阵,U(t)为t时刻测量系统的控制量,P(t|t-1)为X(t|t-1)对应的协方差矩阵,P(t-1|t-1)为X(t-1|t-1)对应的协方差矩阵;A
状态更新:根据当前时刻的测量值得到当前状态的后验估计值;状态更新方程为:
X(t|t)=X(t|t-1)+Kg(t)(Z(t)-HX(t|t-1))
Kg(t)=P(t|t-1)H
P(t|t)=(I-Kg(t)H)P(t|t-1)
其中Kg(t)为Kalman滤波增益,Z(t)为t时刻RSSI值得测量值,H为测量系统的参数矩阵,H
3)从嗅探技术设备获得海量数据后进行分析处理,根据信号接受强度RSSI与距离d的转化公式,实时计算出无线终端与AP的相对距离。由电磁场理论得知,如果天线高度大于2.0m,那么电磁波基本不被地面吸收,地面对无线信号传播产生的影响很小,即当天线高度变化时RSSI值基本不会变化,且为了避免丢包现象,本发明经过大量实验证明,1.2m为性价比最高的应用高度。
信号接受强度与距离的转化公式为:
[RSSI]dBm=A-10nlg(d)
其中[RSSI]dBm表示接收的信号强度,A表示AP距离无线终端1m时的信号强度,n表示信号传播常数;d表示无线终端与AP的距离。
4)嗅探技术设备的嗅探技术范围一般为100m-150m,因此为了提高报警效率,防止给驾驶员带来由于频繁报警导致的疲劳,需要设定一个安全距离,在此距离下生成安全预警。进行自车车速检测并根据驾驶员行为特性以及汽车反应特性等计算随自车车速动态变化的安全预警距离,安全预警距离L模型为:
其中t
5)对预警距离内嗅探技术到的无线终端MAC地址进行统计,若无线终端数量大于某阈值则意味着即将进入人员密集区,例如人行道、十字路口等,则发出语音提醒;若预测到目标在安全预警距离内且有靠近趋势,则发出语音提醒。如图2所示,在预警范围内预测到有与行人碰撞的可能性,则发出预警;若目标在安全预警范围内但并无靠近趋势,如自车左边的汽车,则不发出预警。
本实施例的一种基于嗅探技术的车辆行人碰撞预警装置,其包括嗅探测距模块及动态安全预警距离计算模块,所述嗅探测距模块,对1,6,11三个无重叠的频率范围信道侦听,实时快速的捕获到附近无线终端的MAC地址及RSSI值,对获取到的RSSI值进行Kalman滤波处理,平滑随机噪声,预测无线终端的未来走向,根据距离转化公式计算AP与无线终端的距离;所述动态安全预警距离计算模块,首先检测自车车速,然后结合驾驶员行为特性、汽车反应特性,在车辆周围计算动态安全预警距离;最后实时统计预警距离内的无线终端数量并对可能发生碰撞的情况及时发出语音提醒。
- 一种基于嗅探技术的车辆行人碰撞预警方法及装置
- 一种基于道路前方行人和骑行者的防碰撞预警方法