张力控制绞盘装置及其操作方法
文献发布时间:2023-06-19 12:24:27
本申请为2019年01月29日提交的、申请号为201910084545.8、名称为可调变式电源供应系统及其操作方法的发明专利的分案申请。
技术领域
本发明是有关于一种张力控制绞盘装置及其操作方法。
背景技术
一般无人机(Drone)的电力来源为电池。无人机的飞行时间取决于电池的容量。然而电池的容量是有限的,当无人机需要较长的飞行时间时,电池可能难以提供足够的电量。为了延长无人机的飞行时间,系留无人机(Tethered Drone)是另一种选择。地面装置可以经由电源缆线(power cable)提供电力给系留无人机,因此系留无人机的飞行时间可以被大幅延长。
发明内容
本发明提供一种张力控制绞盘装置及其操作方法,以自动调整缆线的张力。
本发明的一实施例提供一种张力控制绞盘装置,适用于无人载具。所述张力控制绞盘装置包括绞盘模块以及绞盘控制器。绞盘模块用于收放缆线。缆线的第一端用于耦接至无人载具。缆线的第二端用于耦接至电力供应装置。电力供应装置经由缆线提供源电力给所述无人载具。绞盘控制器耦接至绞盘模块。根据在无人载具与绞盘模块之间的缆线的张力,绞盘控制器用于对应控制绞盘模块对缆线的收放线模式或速度,以自动调整缆线的张力。
本发明的一实施例提供一种张力控制绞盘装置的操作方法,适用于无人载具。所述操作方法包括:由绞盘模块收放缆线,其中缆线的第一端用于耦接至无人载具,缆线的第二端用于耦接至电力供应装置,电力供应装置经由缆线提供源电力给无人载具;以及根据在无人载具与绞盘模块之间的缆线的张力,由绞盘控制器对应控制绞盘模块对缆线的收放线模式或速度,以自动调整缆线的张力。
基于上述,本发明诸实施例所述绞盘控制器可以根据在无人载具与绞盘模块之间的缆线的张力,而对应控制绞盘模块对缆线的收放线模式以及(或是)速度。因此所述张力控制绞盘装置可以自动调整缆线的张力。
为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合附图作详细说明如下。
附图说明
图1是依照本发明的一实施例所绘示的一种可调变式电源供应系统(adaptivepower supply system)的电路方块(circuit block)示意图。
图2是依照本发明的一实施例所绘示的一种可调变式电源供应系统的操作方法的流程示意图。
图3是依照本发明的另一实施例所绘示的一种可调变式电源供应系统的操作方法的流程示意图。
图4是依照本发明的一实施例所绘示的一种张力控制绞盘装置的电路方块示意图。
图5是依照本发明的一实施例所绘示的一种张力控制绞盘装置的操作方法的流程示意图。
图6是依照本发明的另一实施例所绘示的一种张力控制绞盘装置的电路方块示意图。
图7是依照本发明的另一实施例所绘示的一种张力控制绞盘装置的操作方法的流程示意图。
图8是依照本发明的一实施例说明图6所示绞盘与整线机构的俯视示意图。
【附图中本公开实施例主要组件符号说明】
10:缆线
20:电力供应装置
100:无人载具
110:负载电路
120:感测电路
120a、120b、120c:传感器
130:电源调度控制器
140:可调变式电源供应器
150:电池
400:张力控制绞盘装置
410:绞盘控制器
420:绞盘模块
421:马达
422:绞盘
600:张力控制绞盘装置
610:绞盘控制器
620:绞盘模块
630:整线机构
640:滚轮
650:张力传感器
SP:源电力
S210~S250、S251~S254、S510~S520、S710~S730、S731~S735:步骤
具体实施方式
在本发明说明书全文(包括权利要求书)中所使用的“耦接(或连接)”一词可指任何直接或间接的连接手段。举例而言,若文中描述第一装置耦接(或连接)于第二装置,则应该被解释成该第一装置可以直接连接于该第二装置,或者该第一装置可以通过其他装置或某种连接手段而间接地连接至该第二装置。另外,凡可能之处,在附图及实施方式中使用相同标号的组件/构件/步骤代表相同或类似部分。不同实施例中使用相同标号或使用相同用语的组件/构件/步骤可以相互参照相关说明。
在一些实施例中,系留无人机内部没有配置电源供应器。系留无人机的飞控(flycontrol)系统、电子速度控制(electric speed control,ESD)电路、马达(Motor)以及其他负载电路/组件所需的电力由电源缆线直接提供。因此,地面装置会经由电源缆线提供直流(direct-current,DC)的电力给系留无人机。较长的电源缆线具有较长的寄生电阻。举例来说,若是100公尺的电源缆线的电阻值为15欧姆,且系留无人机所需功率与电压分别为600瓦特与24伏特,则电源缆线所传送的直流电力的电流为600/24=25安培,致使电源缆线的压降为15*25=375伏特。因此,地面装置需要提供给电源缆线的直流电力的电压为375+24=399伏特。造成电源缆线的电线损耗(wire-loss)为375*25=9375瓦特。此为相当大的电线损耗。
另一方面,若是地面装置没有对电源缆线进行张力控制,电源缆线可能会缠绕(打结)。
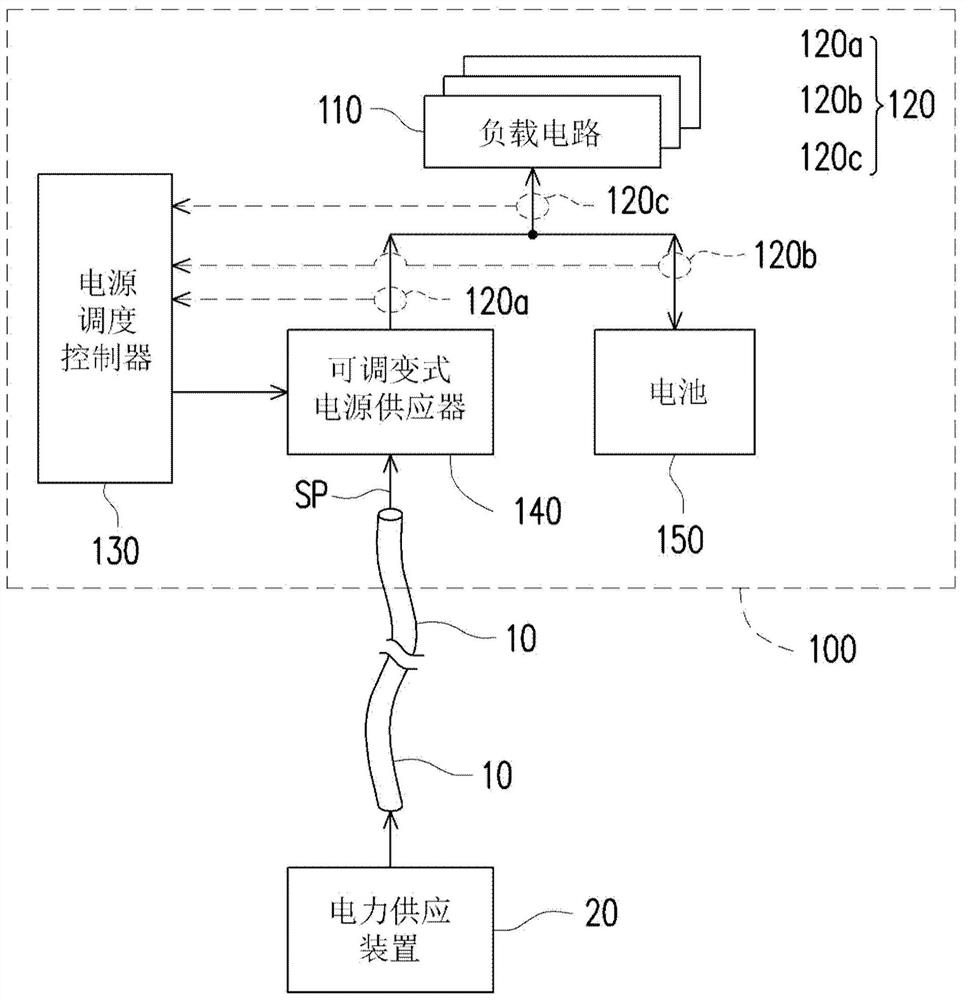
图1是依照本发明的一实施例所绘示的一种可调变式电源供应系统(adaptivepower supply system)的电路方块(circuit block)示意图。图1所示可调变式电源供应系统适用于无人载具(unmanned vehicle)100。依照设计需求,所述无人载具100例如是无人机(Drone)、无人车、机器人或是其他机电装置。所述无人机可以是系留无人机(TetheredDrone)或是其他类型的无人机。无人载具100配置有图1所示可调变式电源供应系统与其他组件。以无人机为例,无人载具还可能配置有马达(Motor)、飞控(fly control)系统、电子速度控制(electric speed control,ESD)电路及/或其他组件。依照设计需求,所述马达可以驱动无人载具的机械能机构,例如螺旋桨、车轮、机械脚或是其他机构。
图1所示可调变式电源供应系统包括负载电路110、感测电路120、电源调度控制器(power dispatch controller)130、可调变式电源供应器(adaptive power supply)140以及电池150。在图1所示实施例中,负载电路110、感测电路120、电源调度控制器130、可调变式电源供应器140以及电池150配置于无人载具100。依照设计需求,负载电路110可以包括马达、飞控系统、电子速度控制电路以及/或是其他电性组件。
缆线10的第一端耦接至可调变式电源供应器140的输入端。缆线10的第二端耦接至电力供应装置20的输出端。在一实施例中,缆线10包括电源缆线,电力供应装置20可以经由缆线10提供源电力SP给可调变式电源供应器140。举例来说,在一些实施例中,电力供应装置20可以经由缆线10提供交流(alternating current,AC)的高电压电力(源电力SP)给无人载具100。在另一些实施例中,电力供应装置20可以经由缆线10提供直流(direct-current,DC)的高电压电力(源电力SP)给无人载具100。可调变式电源供应器140可以将源电力SP的电压调整/转换为某一个电压准位,以符合无人载具100的负载电路110的额定电压。可调变式电源供应器140的输出端耦接至负载电路110的电力输入端,以供电给负载电路110。本实施例并不限制可调变式电源供应器140的实施方式。举例来说,在一些实施例中,可调变式电源供应器140可以是交流-直流转换器(AC-to-DC converter)或是其他电力转换电路。在另一些实施例中,可调变式电源供应器140可以是直流-直流转换器(DC-to-DCconverter)或是其他电力转换电路。例如,依照设计需求,可调变式电源供应器140可以是切换式稳压器(switching regulator)或是其他稳压电路。
电力供应装置20可以经由缆线10提供交流(alternating current,AC)的高电压电力(源电力SP,例如交流电压220伏特)给无人载具100。假设无人载具100的负载电路110所需功率与电压分别为600瓦特与直流电压24伏特。可调变式电源供应器140可以将源电力SP的交流电压220伏特调整/转换为直流电压24伏特,以便供电给负载电路110。缆线10的长度可以依照设计需求来决定。举例来说,缆线10的长度可以是100公尺,若100公尺的缆线10的寄生电阻的电阻值为15欧姆。在未由电池150供电的条件下,缆线10所传送的交流电力的电流为600/220≈2.73安培,致使缆线10的压降为15*(600/220)≈40伏特。缆线10的电线损耗(wire-loss)为[15*(600/220)]*(600/220)≈112瓦特。于此实施例中,源电力SP的电压大于负载电路110的额定电压,而可调变式电源供应器140将源电力SP的电压准位降压至符合负载电路110的额定电压。因此,缆线10的电流值可以被降低,以有效降低缆线10的电线损耗。
电池150耦接至可调变式电源供应器140的输出端。即,可调变式电源供应器140以及电池150并联至负载电路110的电力输入端。电池150可以作为无人载具100的备援电池(Buffered Battery)。在一些应用情境中,基于电源调度控制器130的控制,电池150与可调变式电源供应器140可以选择性地共同供电至负载电路110。在可调变式电源供应器140的电源供应发生异常时,电池150可以提供电源让无人载具100可进行紧急处理(例如紧急降落、紧急停车、发送求救信号等)。
感测电路120耦接至可调变式电源供应器140的输出端,以感测可调变式电源供应器140的输出。在一些实施例中,感测电路120耦接至电池150,以感测电池150的输出。基于设计需求,在一些实施例中,感测电路120耦接至负载电路110的电力输入端,以感测负载电路110的电力输入。举例来说(但不限于此),感测电路120包括传感器120a、传感器120b与传感器120c。传感器120a接至可调变式电源供应器140的输出端,以感测可调变式电源供应器140的输出。传感器120b耦接至电池150,以感测电池150的输出。传感器120c耦接至负载电路110的电力输入端,以感测负载电路110的输入。依照设计需求,传感器120a可以包括电压传感器、电流传感器以及/或是其他电性传感器。传感器120a可以感测可调变式电源供应器140的输出电压、输出电流、电流方向以及/或是其他电性特征,然后将感测结果提供给电源调度控制器130。传感器120b可以参照传感器120a的相关说明来类推,故不再赘述。传感器120c可以包括电压传感器、电流传感器以及/或是其他电性传感器。传感器120c可以感测负载电路110的输入电压、输入电流、电流方向以及/或是其他电性特征,然后将感测结果提供给电源调度控制器130。
图2是依照本发明的一实施例所绘示的一种可调变式电源供应系统的操作方法的流程示意图。请参照图1与图2。可调变式电源供应器140的输入端接收源电力SP(步骤S210),而可调变式电源供应器140的输出端供电至无人载具100的负载电路110(步骤S220)。依照设计需求,在步骤S230中,感测电路120可以感测可调变式电源供应器140的输出端的输出,以及/或是感测电路120可以感测被配置于无人载具100的电池150的输出。在另一实施例中,依照设计需求,感测电路120可以感测可调变式电源供应器140的输出、电池150的输出以及/或是负载电路110的电力输入。举例来说,在一些实施例中,感测电路120在步骤S230中可以感测可调变式电源供应器140的输出端的输出电能(例如电压、电流以及/或是其他电性特性),但没有感测电池150的输出与负载电路110的电力输入,以获得感测结果。在另一些实施例中,感测电路120在步骤S230中可以感测可调变式电源供应器140的输出端的输出与电池150的输出,但没有感测负载电路110的电力输入,以获得感测结果。在又一些实施例中,感测电路120在步骤S230中可以感测可调变式电源供应器140的输出端的输出、电池150的输出与感测负载电路110的电力输入,以获得感测结果。
电源调度控制器130耦接至感测电路120,以接收感测电路120的感测结果。电源调度控制器130还耦接至可调变式电源供应器140。感测电路120可以对整体电源控制提供一个保护机制。电源调度控制器130可以通过感测电路120得知可调变式电源供应器140的输出端的电压、电流、电流方向及/或其他电性信息,以及/或是电池150的电压大小、电流大小、电流方向及/或其他电性信息。根据感测电路120的感测结果,电源调度控制器130可以控制可调变式电源供应器140的输出端的输出(步骤S240)。
通过可调变式电源供应器140的输出的调整,电源调度控制器130可以决定由可调变式电源供应器140供电至负载电路110、或由电池150供电至负载电路110、或由电池150与可调变式电源供应器140共同供电至负载电路110(步骤S250)。举例来说,电池150的输出电压会随着电池150的充放电而改变。当电池150放电(例如对负载电路110提供电力)时,电池150的输出电压会下降,因此电源调度控制器130可以提高可调变式电源供应器140的输出电压。当可调变式电源供应器140的输出电压高于电池150的输出电压时,可调变式电源供应器140可以对负载电路110供电,同时对电池150充电。电源调度控制器130可以监控可调变式电源供应器140、电池150以及/或是负载电路110的电压大小、电流大小以及/或是电流方向,进而动态调整可调变式电源供应器140的输出电压,以便使电池150处于充电状态或是放电状态。
图3是依照本发明的另一实施例所绘示的一种可调变式电源供应系统的操作方法的流程示意图。图3所示步骤S210至步骤S250可以参照图2的相关说明,故不再赘述。在图3所示实施例中,步骤S250包括步骤S251、步骤S252、步骤S253与步骤S254。请参照图1与图3。在此实施例中,感测电路120感测了可调变式电源供应器140的输出电压以及电池150的输出电压。根据可调变式电源供应器140的输出电压与电池150的输出电压,电源调度控制器130可以决定由可调变式电源供应器140与电池150二者其中一者供电至负载电路110,或是由电池150与可调变式电源供应器140共同供电至负载电路110。
举例来说,电源调度控制器130可以将可调变式电源供应器140的输出电压调大,使得可调变式电源供应器140的输出电压大于电池150的输出电压(步骤S251为“大于电池的输出电压”)。因此,可调变式电源供应器140可以供电至负载电路110,并且同时对电池150充电(步骤S252)。例如,当电源调度控制器130得知电池150的输出电压过低(例如,电池150的输出电压低于某一个门坎电压)时,电源调度控制器130可以调大可调变式电源供应器140的输出电压。当可调变式电源供应器140的输出电压大于电池150的输出电压时,可调变式电源供应器140可以对负载电路110供电并且对电池150进行充电。
再举例来说,电源调度控制器130可以调整可调变式电源供应器140的输出电压,使得可调变式电源供应器140的输出电压等于电池150的输出电压(步骤S251为“等于电池的输出电压”)。因此,可调变式电源供应器140与电池150可以共同供电至负载电路110(步骤S253)。当电源调度控制器130得知负载电路110需要大电流时(例如通过感测电路120或是无人载具100的控制系统、软件或其他电路得知),在电源调度控制器130来不及供应(或不足以供应)所述大电流的情况下,电池150可以实时地(无切换地)提供电流给负载电路110,以满足负载电路110的大电流需求。也就是说,当负载电路110需要大电流时,可调变式电源供应器140与电池150可以实时地(无切换地)共同供电至负载电路110。待负载电路110的电流需求降低后,电源调度控制器130可以调升可调变式电源供应器140的输出电压,以便对电池150进行充电。
更举例来说,电源调度控制器130可以调低可调变式电源供应器140的输出电压,使得可调变式电源供应器140的输出电压低于电池150的输出电压(步骤S251为“小于电池的输出电压”)。因此,电池150可以供电至负载电路110(步骤S254)。
步骤S250的实施方式不受限于图3。举例来说,在另一些实施例中,感测电路120可以感测可调变式电源供应器140的输出端的输出电流以及电池150的输出电流。根据可调变式电源供应器140的输出电流的方向及电池150的输出电流的方向,电源调度控制器130可以控制/决定可调变式电源供应器140的输出电压。此外,感测电路120还可以感测负载电路110的电力输入的输入电流。当负载电路110的输入电流大于可调变式电源供应器140的输出电流及电池150的输出电流的额定值时(亦即可调变式电源供应器140以及电池150无法供应足够电流给负载电路110),电源调度控制器130可以通知电力供应装置20,使电力供应装置20可以经由缆线10提供更高的源电力SP给可调变式电源供应器140。使得可调变式电源供应器140能输出更大的电流而与电池150共同供电至负载电路110。
依照设计需求,图1所示可调变式电源供应系统可以还包括张力控制绞盘(Tension Control Winch)装置。所述张力控制绞盘装置被用来收放缆线10,并且自动控制/调整缆线10的张力。通过缆线10的张力调整,缆线10的缠绕(打结)可以被有效避免或减少。
举例来说,图4是依照本发明的一实施例所绘示的一种张力控制绞盘装置400的电路方块示意图。图4所示张力控制绞盘装置400适用于无人载具100。张力控制绞盘装置400通过缆线10供电无人载具100。所述张力控制绞盘装置400包括绞盘控制器410以及绞盘模块420。绞盘模块420用于收放缆线10,其中缆线10的第一端用于耦接至无人载具100,缆线10的第二端用于耦接至电力供应装置20。电力供应装置20经由缆线10提供源电力SP给无人载具100。绞盘控制器410耦接至绞盘模块420。绞盘控制器410根据在无人载具100与绞盘模块420之间的缆线10的张力来对应控制绞盘模块420对缆线10的收放线模式或速度,以自动调整缆线10的张力。
图5是依照本发明的一实施例所绘示的一种张力控制绞盘装置的操作方法的流程示意图。请参照图4与图5。步骤S510由绞盘模块420收放缆线10。根据在无人载具100与绞盘模块420之间的缆线10的张力,步骤S520由绞盘控制器410对应控制绞盘模块420对缆线10的收放线模式或速度,以自动调整缆线10的张力。
在图4所示实施例中,绞盘模块420可以包括马达421与绞盘422。马达421可以带动绞盘422进行转动,使得缆线10可以绕卷于绞盘422上。依照设计需求,马达421可以任何类型的马达,例如直流马达、步进马达或是其他类型马达。绞盘控制器410可以得知马达421的负载状况,进而依据所述负载状况而推知缆线10的张力。依照设计需求,绞盘控制器410可以预先定义张力上限值与/或张力下限值。绞盘控制器410可以根据缆线10的张力及张力上限值(与/或张力下限值)来控制马达421对缆线10的收放线模式或速度。
举例来说,当缆线10的张力大于张力上限值时,绞盘控制器410可以控制马达421与绞盘422进入放线模式,以便减少缆线10的张力。当缆线10的张力小于张力下限值时,绞盘控制器410可以控制马达421与绞盘422进入收线模式,以便增加缆线10的张力。当缆线10的张力介于张力上限值与张力下限值之间时,绞盘控制器410可以控制马达421进入停止模式,以停止绞盘422的转动。所述张力上限值与所述张力下限值可以依照设计需求来决定。
再举例来说,当缆线10的张力大于张力上限值时,绞盘控制器410可以控制马达421的转速,以使绞盘422的速度为负值(亦即放线),以便减少缆线10的张力。当缆线10的张力小于张力下限值时,绞盘控制器410可以控制马达421的转速,以使绞盘422的速度为正值(亦即收线),以便增加缆线10的张力。当缆线10的张力介于张力上限值与张力下限值之间时,绞盘控制器410可以控制马达421的转速,以使绞需422的速度为零(即停止收放线)。
图6是依照本发明的另一实施例所绘示的一种张力控制绞盘装置600的电路方块示意图。图6绘示了张力控制绞盘装置600的侧面示意图。在图6所示实施例中,图6所示张力控制绞盘装置600包括绞盘控制器610、绞盘模块620、整线(wire trimming)机构630、滚轮640以及张力传感器650。图6所示张力控制绞盘装置600、绞盘控制器610以及绞盘模块620可以参照图4所示张力控制绞盘装置400、绞盘控制器410以及绞盘模块420的相关说明来类推,故不再赘述。须注意的是,依照设计需求,整线机构630、滚轮640以及张力传感器650其中的一者或多者在其他实施例中可能会被省略。
图7是依照本发明的另一实施例所绘示的一种张力控制绞盘装置的操作方法的流程示意图。请参照图4与图5。张力传感器650耦接至绞盘控制器610。张力传感器650用于感测在无人载具100与绞盘模块620之间的缆线10的张力,并产生相关于所述张力的一个张力值给绞盘控制器610。在步骤S710中,绞盘控制器610可以预先设定张力上限值与/或张力下限值。
图7所示步骤S720与步骤S730可以参照图5所示步骤S510与步骤S520的相关说明。基于绞盘控制器610的控制,绞盘模块620收放缆线10(步骤S720)。根据张力传感器650所提供的张力值以及步骤S710所设定的张力上限值(与/或张力下限值),绞盘控制器610控制绞盘模块620对缆线10的收放线模式或速度(步骤S730)。
在图7所示实施例中,步骤S730包括步骤S731、步骤S732、步骤S733、步骤S734与步骤S735。于步骤S731中,张力传感器650可以感测在无人载具100与绞盘模块620之间的缆线10的张力,并产生相关于所述张力的一个张力值给绞盘控制器610。于步骤S732至步骤S735中,绞盘控制器610根据所述张力值及张力上限值(和/或张力下限值)而控制绞盘模块620对缆线10的收放线模式或速度。所述张力上限值与所述张力下限值可以依照设计需求来决定。
当缆线10的张力大于张力上限值时(步骤S732为“大于张力上限值”),绞盘控制器610可以控制绞盘模块620进入放线模式(步骤S733),以便减少缆线10的张力。在另一实施例中,绞盘控制器610在步骤S733中可以控制绞盘模块620的速度(绞盘422的转速),以使绞盘422的收线速度为负值(亦即放线),以便减少缆线10的张力。
当缆线10的张力介于张力上限值与张力下限值之间时(步骤S732为“介于张力上限值与张力下限值之间”),绞盘控制器610可以控制绞盘模块620进入停止模式(步骤S734),以停止绞盘422的转动。在另一实施例中,绞盘控制器610在步骤S734中可以控制绞盘模块620的速度(绞盘422的转速),以使绞盘422的收线速度为零(亦即停止收放线)。
当缆线10的张力小于张力下限值时(步骤S732为“小于张力下限值”),绞盘控制器610可以控制绞盘模块620进入收线模式(步骤S735),以便增加缆线10的张力。在另一实施例中,绞盘控制器610在步骤S735中可以控制绞盘模块620的速度(绞盘422的转速),以使绞盘422的收线速度为正值(亦即收线),以便增加缆线10的张力。
在一些实施例中,所述操作方法还包括:在绞盘模块620对缆线10收线的过程中,由整线机构630根据绞盘模块620的绞盘422的转动圈数而动态调整缆线10在绞盘422中的收线位置。
图8是依照本发明的一实施例说明图6所示绞盘422与整线机构630的俯视示意图。整线机构630可以带动缆线10进行移动(例如沿着图8所示箭头方向移动)。在绞盘模块620的绞盘422对缆线10收线的过程中,整线机构630可以根据绞盘422的转动圈数而动态调整缆线10在绞盘422中的收线位置。如此,缆线10可以均匀分散于绞盘422上。
综上所述,一种张力控制绞盘装置适用于无人载具,所述张力控制绞盘装置包括绞盘模块以及绞盘控制器。绞盘模块用于收放缆线,其中该缆线的第一端用于耦接至该无人载具,该缆线的第二端用于耦接至电力供应装置,该电力供应装置经由该缆线提供源电力给该无人载具。绞盘控制器耦接至该绞盘模块,其中该绞盘控制器用于根据在该无人载具与该绞盘模块之间的该缆线的张力来对应控制该绞盘模块对该缆线的收放线模式或速度,以自动调整该缆线的该张力。
在一些实施例中,该张力控制绞盘装置还包括张力传感器。张力传感器耦接至该绞盘控制器,用于感测在该无人载具与该绞盘模块之间的该缆线的该张力,并产生相关于该张力的张力值给该绞盘控制器。
在一些实施例中,该绞盘控制器根据该张力值及张力上限值或张力下限值来控制该绞盘模块对该缆线的收放线模式或速度。
在一些实施例中,该张力控制绞盘装置还包括整线机构。在该绞盘模块对该缆线收线的过程中,整线机构根据该绞盘模块的绞盘的转动圈数而动态调整该缆线在该绞盘中的收线位置。
综上所述,一种张力控制绞盘装置的操作方法适用于无人载具。所述操作方法包括:由绞盘模块收放缆线,其中该缆线的第一端用于耦接至该无人载具,该缆线的第二端用于耦接至电力供应装置,该电力供应装置经由该缆线提供源电力给该无人载具;以及根据在该无人载具与该绞盘模块之间的该缆线的张力,由绞盘控制器对应控制该绞盘模块对该缆线的收放线模式或速度,以自动调整该缆线的该张力。
在一些实施例中,该操作方法还包括:由张力传感器感测在该无人载具与该绞盘模块之间的该缆线的该张力;以及由该张力传感器产生相关于该张力的张力值给该绞盘控制器。
在一些实施例中,所述对应控制该绞盘模块对该缆线的收放线模式或速度的步骤包括:由该绞盘控制器根据该张力值及张力上限值或张力下限值而控制该绞盘模块对该缆线的收放线模式或速度。
在一些实施例中,该操作方法还包括:在该绞盘模块对该缆线收线的过程中,由整线机构根据该绞盘模块的绞盘的转动圈数而动态调整该缆线在该绞盘中的收线位置。
依照不同的设计需求,上述电源调度控制器130及/或绞盘控制器610的方块的实现方式可以是硬件(hardware)、固件(firmware)、软件(software,即程序)或是前述三者中的多者的组合形式。
以硬件形式而言,上述电源调度控制器130及/或绞盘控制器610的方块可以实现于集成电路(integrated circuit)上的逻辑电路。上述电源调度控制器130及/或绞盘控制器610的相关功能可以利用硬件描述语言(hardware description languages,例如Verilog HDL或VHDL)或其他合适的编程语言来实现为硬件。举例来说,上述电源调度控制器130及/或绞盘控制器610的相关功能可以被实现于一或多个控制器、微控制器、微处理器、特殊应用集成电路(Application-specific integrated circuit,ASIC)、数字信号处理器(digital signal processor,DSP)、场可程序逻辑门阵列(Field Programmable GateArray,FPGA)及/或其他处理单元中的各种逻辑区块、模块和电路。
以软件形式及/或固件形式而言,上述电源调度控制器130及/或绞盘控制器610的相关功能可以被实现为编程码(programming codes)。例如,利用一般的编程语言(programming languages,例如C、C++或汇编语言)或其他合适的编程语言来实现上述电源调度控制器130及/或绞盘控制器610。所述编程码可以被记录/存放在记录媒体中,所述记录媒体中例如包括只读存储器(Read Only Memory,ROM)、存储装置及/或随机存取内存(Random Access Memory,RAM)。计算机、中央处理器(Central Processing Unit,CPU)、控制器、微控制器或微处理器可以从所述记录媒体中读取并执行所述编程码,从而达成相关功能。作为所述记录媒体,可使用“非临时的计算机可读取媒体(non-transitory computerreadable medium)”,例如可使用带(tape)、碟(disk)、卡(card)、半导体内存、可程序设计的逻辑电路等。而且,所述程序也可经由任意传输媒体(通信网路或广播电波等)而提供给所述计算机(或CPU)。所述通信网路例如是互联网(Internet)、有线通信(wiredcommunication)、无线通信(wireless communication)或其它通信介质。
综上所述,本发明诸实施例所述可调变式电源供应器与电池被配置于无人载具。可调变式电源供应器可以将源电力的电压调整/转换为符合无人载具的负载电路的额定电压的电压准位。因此,缆线的电流值可以被尽可能地降低,以有效降低缆线的电线损耗。并且,当负载电路瞬间需要大电流时,可调变式电源供应器与电池可以实时地(无切换地)共同供电至负载电路。
虽然本发明已以实施例揭露如上,然其并非用于限定本发明,任何本领域技术人员,在不脱离本发明的精神和范围内,当可作些许的更动与润饰,故本发明的保护范围当以权利要求所界定的范围为准。
- 张力控制绞盘装置及其操作方法
- 一种用于柔版印刷的张力控制装置及其操作方法