超薄玻璃基板平整度多参数高精度测量系统及方法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明属于光电检测技术领域,具体涉及超薄玻璃基板平整度多参数高精度测量系统及方法。
背景技术
超薄玻璃基板是指厚度规格在0.1~1.1mm之间,且表面极其平整的用于信息显示的薄玻璃片,是信息显示器件的关键零组件,是战略新兴产业——电子信息显示产业最重要的关键基础材料之一,并广泛用于军工及民用领域,如国防科技、智慧城市、信息通讯等。平整度是指玻璃基板两表面凹凸不平及厚薄不均的程度,可用基板厚度均匀性、翘曲度等参数来衡量。其制作生产过程中可能会产生厚度不均匀、翘曲和表面波纹度过大等问题,就会导致信息显示器件关键零组件的缺陷,直接影响所显示图形的质量,甚至造成次品和废品。这制约了我国战略新兴产业电子信息显示产业对该类关键部件需求的瓶颈问题。
目前,国内外超薄玻璃基板平整度测量采用较多的方法有:激光三角法、干涉法、光谱共焦法等,但测量效率和精度都存在一定缺陷。
发明内容
针对上述现有技术的缺陷或不足,本发明的目的在于提供一种超薄玻璃基板平整度多参数高精度测量系统及方法,该方法利用不同波长光的会聚的离散性、色散性结合3CCD彩色成像及扫描振镜技术实现超薄玻璃基板平整度多参数快速同步高精度测量,有效的提高了测量精度和效率。
为实现上述目的,本发明采用以下技术方案:
超薄玻璃基板平整度多参数高精度测量系统,主要包括光的准直组件、光的扫描组件、光的色散组件、光的成像组件,所述光的准直组件包括准直透镜和扩束镜,光的扫描组件包括分光镜和扫描振镜,所述光电的色散组件包括色散物镜组和色散棱镜,光的成像组件包括会聚目镜、3CCD彩色视觉传感器和黑白视觉传感器;疝气白光光源发出的平行光依次经过光的准直组件、光的扫描组件、光的色散组件,然后经过玻璃基板反射依次经过光的色散组件、光的扫描组件和光的成像组件,实现多参数信息获取。
超薄玻璃基板平整度多参数高精度测量方法,具体包括以下步骤:
疝气白光光源发出的平行光经过TIR棱镜反射到数字调光器件形成动态条纹;
动态条纹经过TIR棱镜透射到准直透镜进行光路准直后到扩束镜进行扩束,分光镜将扩束后的平行条纹光透射到扫描振镜上,扫描振镜以一定的角速度旋转,实现光线扫描运动,色散物镜组将扫描条纹中不同颜色光会聚在玻璃基板的上表面,形成动态扫描点阵;
玻璃基板的上表面将不同颜色的光反射回到分光镜,分光镜反射到色散棱镜,色散棱镜将返回来的光按不同波长色散开经过会聚目镜会聚到3CCD彩色视觉传感器,同时黑白视觉传感器拍摄获得玻璃基板上下表面的光点成像;
最后通过3CCD彩色视觉传感器上光强中心的RGB值计算得到光的波长λ即可获得对应玻璃基板上表面的位置信息及翘曲度,同时计算黑白视觉传感器上两个成像点的距离即获得玻璃基板的厚度。
进一步地,所述动态条纹形成动态扫描点阵的具体做法如下:
首先,根据被测玻璃基板的厚度及其测量精度,获得测点最小间距,以及消除测点间光学干扰的最小间距,就可得到照明系统投射出来的适应不同厚度玻璃基板的光线宽度及间距;
接着,通过数字调光器件阵列编码可生成多个二进制掩膜,掩膜的二进制数据1和0分别代表数字调光器件的开关两态,在时间域上,让数字调光器件根据二进制掩膜分时瞬时动作,每一时刻只根据一种二进制掩膜形成部分条纹照明;
然后,在3CCD彩色视觉传感器和黑白视觉传感器曝光时间内完成全部条纹照明,结合3CCD彩色视觉传感器、黑白视觉传感器和色散物镜组的曝光时间成像在一幅图像上,实现条纹照明从时间域到空间域的变换,从而实现基于时空域变换的照明条纹调制,形成动态扫描点阵。
进一步地,所述玻璃基板翘曲度的计算方式如下:
首先根据3CCD彩色视觉传感器测量的图像进行预处理,预处理包括对比度增强、滤波处理等,获得一系列的(RGB)
然后根据标准RGB值与波长λ的对应关系λ=f(R、G、B)得到每一点对应的波长λ
接着通过波长λ
最后通过d
进一步地,玻璃基板厚度的计算方式如下:
通过对一系列厚度为δ
图像预处理后获得一系列的距离D
进一步地,所述数字调光器件阵列编码方式为:
将数字调光器件阵列分割成N个子块,每个子块里有j+1个微镜,分别编号为0,1,2,…,j,不同子块里处于对应位置的微镜给予相同的编号,因此微镜阵列按空间位置被分成N大类:微镜1X,微镜2X,…,微镜NX(X=0,1,2,…,j)。
与现有技术相比,本发明有以下有益效果:
1)发明利用不同波长光在3CCD彩色视觉传感器中RGB值的不同及光会聚的离散性实现超薄玻璃基板平整度多参数高精度测量,有效的提高了测量精度;
2)本发明数字调光结合扫描振镜实现动态条纹空间扫描测量实现超薄玻璃基板平整度多参数点阵同步测量提高了测量效率;
3)本发明利用光的不同波长获得超薄玻璃基板平整度多参数的信息,有效利用了光波长稳定性,消除了环境的影响,提高了测量精度。
附图说明
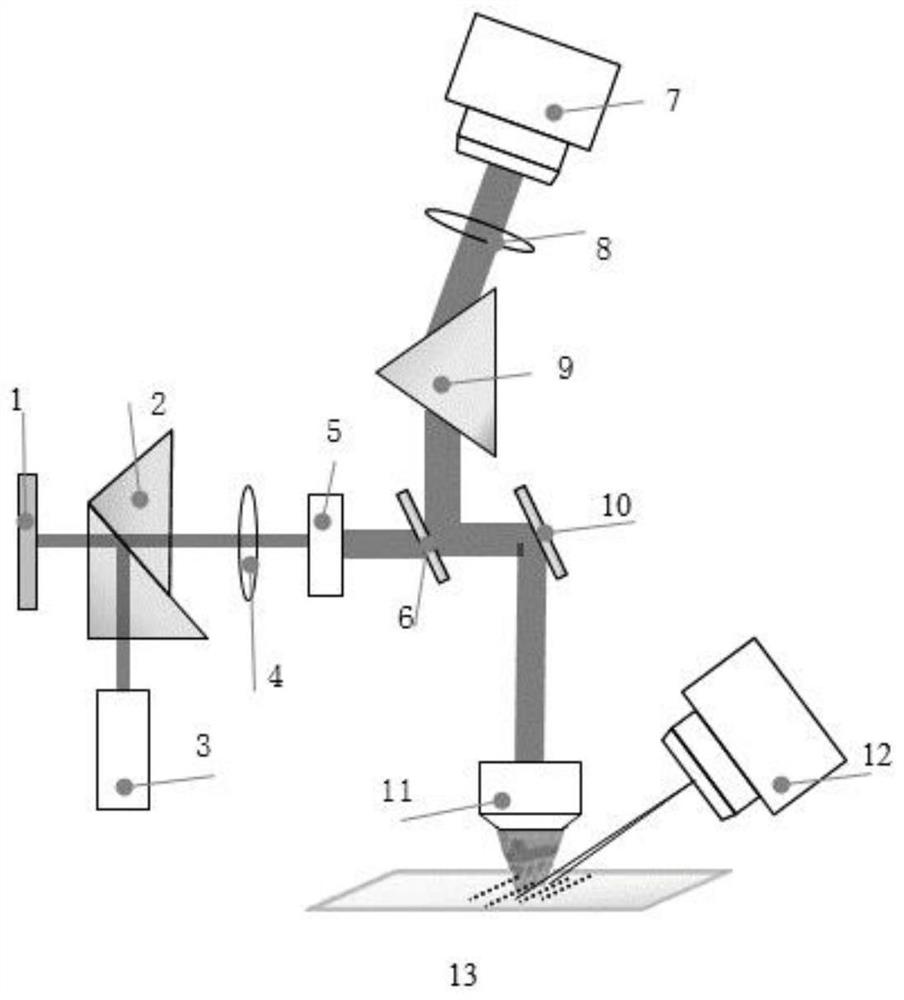
图1为本发明超薄玻璃基板平整度多参数高精度测量系统示意图;
图2为利用数字调光器件实现基于时空域变换的照明条纹调制的工作过程流程图;
图3为数字调光器件阵列编码方案示意图;
图4为玻璃基板平整度多参数高精度数据处理方法流程图。
图中:1-数字调光器件,2-TIR棱镜,3-疝气白光光源,4-准直透镜,5、-扩束镜,6-分光镜,7-3CCD彩色视觉传感器,8-会聚目镜,9-色散棱镜,10-扫描振镜,11-色散物镜组,12-黑白视觉传感器,13-玻璃基板。
具体实施方式
下面结合附图对本发明做进一步详细描述:
如图1所示,超薄玻璃基板平整度多参数高精度测量系统包括光的准直组件、光的扫描组件、光的色散组件、光的成像组件,光的准直组件包括准直透镜4和扩束镜5,光的扫描组件包括分光镜6和扫描振镜10,光电的色散组件包括色散物镜组11和色散棱镜9,光的成像组件包括会聚目镜8、3CCD彩色视觉传感器7和黑白视觉传感器12;疝气白光光源3发出的平行光依次经过光的准直组件、光的扫描组件、光的色散组件,然后经过玻璃基板13反射依次经过光的色散组件、光的扫描组件和光的成像组件,实现多参数信息获取。
超薄玻璃基板平整度多参数高精度测量方法,包括以下步骤:
疝气白光光源3发出的平行光经过TIR棱镜2反射到数字调光器件1形成动态条纹;
动态条纹经过TIR棱镜2透射到准直透镜4进行光路准直后到扩束镜5进行扩束,分光镜6将扩束后的平行条纹光透射到扫描振镜10上,扫描振镜10以W=2πN/t角速度旋转,式中t为曝光时间,N为条纹投影掩码数,实现光线扫描运动,色散物镜组11将扫描振镜10反射形成的扫描条纹中不同颜色光会聚在玻璃基板13的上表面,形成动态扫描点阵;
玻璃基板13的上表面将不同颜色的光反射回到分光镜6,光的成像组件将分光镜6反射回来的光经过色散棱镜9,色散棱镜9将返回来的光按不同波长色散开经过会聚目镜8会聚到3CCD彩色视觉传感器7,同时黑白视觉传感器12拍摄获得玻璃基板13上下表面的光点成像;
最后通过3CCD彩色视觉传感器7上光强中心的RGB值计算得到光的波长λ即可获得对应玻璃基板13上表面的位置信息及翘曲度,同时计算黑白视觉传感器12上两个成像点的距离即获得玻璃基板13的厚度。
为了更加准确地获得超薄玻璃基板13平整度多参数的同步高精度测量,核心的问题是动态扫描点阵的照明和3CCD彩色视觉传感器7光强中心的RGB值与玻璃基板13高度信息的对应关系及黑白视觉传感器12两个成像点的距离与玻璃基板13厚度信息的对应关系。为此,本实施例拟采取如图2所示的方法获得动态扫描点阵照明和如图4所示的玻璃基板平整度多参数高精度获得方法。
如图2所示,利用确定的最小条纹和测点间距设计数字调光器件1的编码,通过微镜控制技术实现精细条纹的高速准确分时显示,将精细条纹照明从时间域到空间域的变换,消除测点间光学干扰。
具体基于时空域变换的照明条纹调制,即动态条纹形成动态扫描点阵的工作过程如下:
首先,根据被测玻璃基板13的厚度及其测量精度,获得测点最小间距,以及消除测点间光学干扰的最小间距,就可得到照明系统投射出来的适应不同厚度玻璃基板13的光线宽度及间距;
接着,通过设计的数字调光器件1阵列编码可生成多个二进制掩膜(掩膜的二进制数据1和0分别代表数字调光器件1的开关两态),进而按时序自动调控数字调光器件1,从而实现照明条纹的调制。数字调光器件1阵列编码采用如图3所示的编码方案,把整个数字调光器件1阵列分割成N个子块,每个子块里有j+1个微镜,分别编号为0,1,2,…,j。不同子块里处于对应位置的微镜给予相同的编号,因此微镜阵列按空间位置被分成N大类:微镜1X,微镜2X,…,微镜NX(X=0,1,2,…,j)。根据上述设计的数字调光器件1阵列编码形成的多个二进制掩膜,在时间域上,让数字调光器件1根据二进制掩膜分时瞬时动作(处于“开”状态),每一时刻只根据一种二进制掩膜形成部分条纹照明;
然后,在3CCD彩色视觉传感器7和黑白视觉传感器12曝光时间内完成全部条纹照明,结合3CCD彩色视觉传感器7、黑白视觉传感器12和色散物镜组11的曝光时间成像在一幅图像上,实现条纹照明从时间域到空间域的变换,从而实现基于时空域变换的照明条纹调制,形成动态扫描点阵。
如图4所示,超薄玻璃基板平整度多参数高精度获得方法如下:
玻璃基板13翘曲度的计算方式如下:
首先根据3CCD视觉传感器7测量的图像进行预处理,预处理包括对比度增强、滤波处理等,获得一系列的(RGB)
然后根据标准RGB值与波长λ的对应关系λ=f(R、G、B)得到每一点对应的波长λ
接着通过波长λ
最后通过d
玻璃基板13厚度的计算方式如下:
通过对一系列厚度为δ
图像预处理后获得一系列的距离D
综上所述,本发明的这种基于不同波长光的会聚的离散性、色散性结合3CCD彩色成像及扫描振镜技术实现超薄玻璃基板平整度多参数快速同步高精度测量方法,优点是利用不同波长的RGB值与高度信息的对应关系,有效利用了光波长稳定性,消除了环境的影响,有效提高了测量精度。
虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
- 超薄玻璃基板平整度多参数高精度测量系统及方法
- 基于高精度同轴定位的多参数内径测量系统与测量方法