一种农业用基于视觉检测智能机器人采摘装置
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及农业采摘技术领域,尤其涉及一种农业用基于视觉检测智能机器人采摘装置。
背景技术
视觉检测的农业采摘机器人已经得到广泛的应用,极大的降低了人力成本,农业机器人是一种机器,是机器人在农业生产中的运用,是一种可由不同程序软件控制,以适应各种作业,能感觉并适应作物种类或环境变化,有检测(如视觉等)和演算等人工智能的新一代无人自动操作机械。
但是现有技术中的农业采摘机器人其一般是将采摘完的果实直接扔在收集筐内,农业采摘机器人无法调节承载框的高度,这就使其在对一些较高的果实进行采摘时较为不便,这时就容易导致果实受到冲击力而发生损坏,同时且在卸料时较为不便,需要耗费较多的时间,在夏季驾驶员进行驾驶时会感觉到酷暑,十分的不适,基于此,本发明提出一种农业用基于视觉检测智能机器人采摘装置。
发明内容
本发明的目的是为了解决现有技术中果实受到冲击力容易发生破坏且无法调节承载框高度的问题,而提出的一种农业用基于视觉检测智能机器人采摘装置。
为了实现上述目的,本发明采用了如下技术方案:一种农业用基于视觉检测智能机器人采摘装置,包括主座,所述主座的底部设置有万向轮,所述主座的顶壁设置有驾驶室,所述主座的顶壁转动连接有转动柱,所述转动柱的顶端固定有支撑板,所述支撑板的顶壁分别固定设置有操作箱与液压缸,所述液压缸的活塞端固定设置有承载箱,所述驾驶室的侧壁贯通固定有风扇箱,所述电机箱内固定设置有电机,所述电机的输出轴贯穿电机箱的顶壁并焊接有转动轴,所述转动轴贯穿主座的座壁并向主座的上方伸出,所述转动轴上固定设置有第一同步轮,所述转动柱上固定设置有第二同步轮,所述第一同步轮与第二同步轮共同套设有同步带,所述承载箱内设置有承载装置,所述风扇箱内设置有送风装置。
在上述基于机器视觉检测的机器人农业采摘装置中,所述承载装置包括有两个对称设置的网块,两个所述网块共同固定有承载网,所述承载箱的外侧壁对称固定有固定块,两个所述固定块的顶壁均焊接有第一弹簧,所述第一弹簧的顶部焊接有第一滑动块,所述第一滑动块与承载箱的侧壁滑动连接并且均焊接有提手,所述承载箱的对称侧壁均开设有相互垂直的滑动槽与通孔,所述通孔与滑动槽贯通连接,所述滑动槽内滑动连接有第一推动杆,所述通孔内滑动连接有第二推动杆,所述滑动槽的底壁焊接有第二弹簧,所述第二弹簧的另一端与第一推动杆焊接固定,所述承载箱的外侧壁与两个所述第一滑动块对应的位置均固定设置有永磁铁,两个所述网块的底部开设有与第二推动杆尺寸大小位置相匹配的卡槽。
在上述基于机器视觉检测的机器人农业采摘装置中,所述送风装置包括有固定板,所述固定板上转动连接有第一转动轴,所述第一转动轴上焊接有第一锥齿轮,所述风扇箱的的箱壁转动连接有扇轴,所述扇轴贯穿风扇箱的箱壁并焊接固定有第二锥齿轮,所述第一锥齿轮与第二锥齿轮啮合连接,所述第一转动轴的转动中心处贯穿滑动连接有平键,所述平键贯穿固定板的板壁并焊接有圆盘,所述固定板的顶壁焊接有竖直板,所述竖直板的底壁焊接有第三弹簧,所述第三弹簧的另一端焊接有第二滑动块,所述竖直板上滑动连接有卡柱。
在上述基于机器视觉检测的机器人农业采摘装置中,所述圆盘上开设有盘孔,所述第二滑动块的顶部开设有柱槽,所述盘孔与柱槽的尺寸相对应,所述卡柱为“L”型结构并且柱端正对盘孔并且与盘孔、柱槽的尺寸大小相配合。
在上述基于机器视觉检测的机器人农业采摘装置中,所述第一推动杆与第二推动杆相抵并且相抵面为楔形面,所述第一推动杆的位置与第一滑动块的位置相对应并且所对应的面为弧形面,所述永磁铁位于滑动槽的上方。
在上述基于机器视觉检测的机器人农业采摘装置中,所述转动轴内开设有键槽,所述键槽的尺寸与平键的尺寸相匹配,所述第一滑动块为铁磁性材料制作而成。
在上述基于机器视觉检测的机器人农业采摘装置中,所述操作箱内设置有采摘结构,所述第一锥齿轮与第二锥齿轮的尺寸大小相同,所述卡柱的上方设置有拉环,所述竖直板上设置有卡柱的限位装置。
与现有的技术相比,本发明的优点在于:
1、通过设置液压缸、风扇箱与锥齿轮等结构,使得此装置在进行农业采摘时,通过液压缸可以控制承载箱的高度,进而可以根据不同果实的状态进行对承载箱高度的调整,并且通过锥齿轮结构的作用使得装置在进行工作时,在炎热的夏季可以为驾驶室内的驾驶员送去清凉,使得驾驶员可以更好的进行工作。
2、通过设置第一推动杆、第二推动杆以及卡槽等结构,使得通过拉动提手使第一滑动块向上移动进而推动第一推动杆移动,由而使得第一推动杆推动第二推动快上移,使第二推动杆卡入卡槽内,因此完成了对承载网的限位,避免在投递果实时,承载网会摇晃而造成果实的掉落,引起浪费;
3、通过第一锥齿轮、同步轮等结构,使得电机在控制装置进行采摘时,由于果实倾斜角度的不同因而会带动操作箱与承载箱进行转动,在夏季时,通过拉环将卡柱上移,此时卡柱脱离与卡槽的配合,此时平键与转动轴内的键槽相匹配,此时转动轴转动将会带动第一锥齿轮转动,通过第二锥齿轮即可使得扇叶进行转动,因而将会使得在炎热的夏季为驾驶室内的人们送去清凉;
4、当采摘冬季与春秋两季的水果而不需要扇叶转动时,此时只需将圆盘上移,拉动第二滑动块,将卡柱下移使卡柱与柱槽相配合从而使得平键脱离与转动轴的键槽的配合,因而使得转动轴转动不会使扇叶转动;
5、通过设置承载网等结构,使得果实在采摘时落在承载网上,减少直接果实降落时的撞击力,减轻对果实的磨损,增加果实的质量,当需要收取果实时,只需拉动提手,使其脱离与永磁铁的接触,即可使得果实网块的限位被接触,便于进行操作。
附图说明
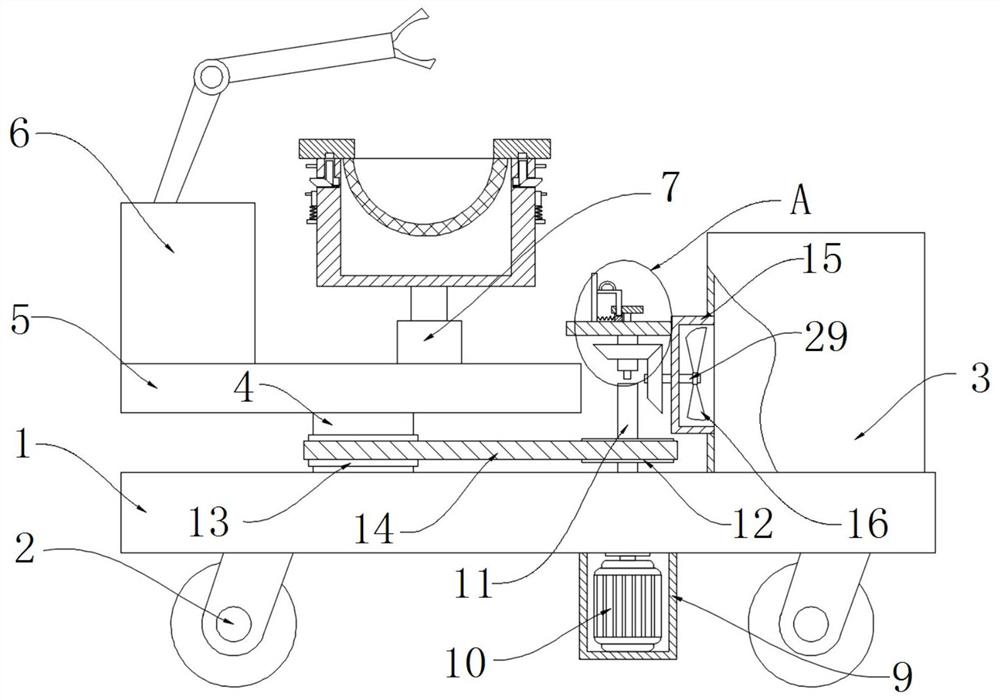
图1为本发明提出的一种农业用基于视觉检测智能机器人采摘装置的结构示意图;
图2为本发明提出的一种农业用基于视觉检测智能机器人采摘装置中承载箱的结构图;
图3为本发明提出的一种农业用基于视觉检测智能机器人采摘装置中A部分的放大示意图;
图4为本发明提出的一种农业用基于视觉检测智能机器人采摘装置中的俯视图。
图中:1主座、2万向轮、3驾驶室、4转动柱、5支撑板、6操作箱、7液压缸、8承载箱、9电机箱、10电机、11转动轴、12第一同步轮、13第二同步轮、14同步带、15风扇箱、16扇叶、17网块、18承载网、19固定块、20第一弹簧、21第一滑动块、22提手、23滑动槽、24第二弹簧、25第一推动杆、26第二推动杆、27卡槽、28永磁铁、29扇轴、30固定板、31第一转动轴、32第一锥齿轮、33第二锥齿轮、34平键、35圆盘、36竖直板、37第三弹簧、38第二滑动块、39柱槽、40卡柱。
具体实施方式
以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
实施例
参照图1-4,一种农业用基于视觉检测智能机器人采摘装置,包括主座1,主座1的底部设置有万向轮2,万向轮2的设置使得装置可以朝向任意方向移动,主座1的顶壁设置有驾驶室3,主座1的顶壁转动连接有转动柱4,转动柱4的顶端固定有支撑板5,支撑板5的顶壁分别固定设置有操作箱6与液压缸7,液压缸7的活塞端固定设置有承载箱8,液压缸7可以使承载箱8上移,因而可以根据果实的状态与高度对承载箱8的高度进行调整,驾驶室3的侧壁贯通固定有风扇箱15,电机箱9内固定设置有电机10,电机10的输出轴贯穿电机箱9的顶壁并焊接有转动轴11,转动轴11贯穿主座1的座壁并向主座1的上方伸出,转动轴11上固定设置有第一同步轮12,转动柱4上固定设置有第二同步轮13,第一同步轮12与第二同步轮13共同套设有同步带14,承载箱8内设置有承载装置,风扇箱15内设置有送风装置。
承载装置包括有两个对称设置的网块17,两个网块17共同固定有承载网18,承载箱8的外侧壁对称固定有固定块19,两个固定块19的顶壁均焊接有第一弹簧20,第一弹簧20的顶部焊接有第一滑动块21,第一滑动块21与承载箱8的侧壁滑动连接并且均焊接有提手22,承载箱8的对称侧壁均开设有相互垂直的滑动槽23与通孔41,通孔41与滑动槽23贯通连接,滑动槽23内滑动连接有第一推动杆25,通孔41内滑动连接有第二推动杆26,滑动槽23的底壁焊接有第二弹簧24,第二弹簧24的另一端与第一推动杆25焊接固定,承载箱8的外侧壁与两个第一滑动块21对应的位置均固定设置有永磁铁28,两个网块17的底部开设有与第二推动杆26尺寸大小位置相匹配的卡槽27。
送风装置包括有固定板30,固定板30上转动连接有第一转动轴31,第一转动轴31上焊接有第一锥齿轮32,风扇箱15的的箱壁转动连接有扇轴29,扇轴29贯穿风扇箱15的箱壁并焊接固定有第二锥齿轮33,第一锥齿轮32与第二锥齿轮33啮合连接,第一转动轴31的转动中心处贯穿滑动连接有平键34,平键34贯穿固定板30的板壁并焊接有圆盘35,固定板30的顶壁焊接有竖直板36,竖直板36的底壁焊接有第三弹簧37,第三弹簧37的另一端焊接有第二滑动块38,竖直板36上滑动连接有卡柱40。
圆盘35上开设有盘孔,第二滑动块38的顶部开设有柱槽39,盘孔与柱槽39的尺寸相对应,卡柱40为“L”型结构并且柱端正对盘孔并且与盘孔、柱槽39的尺寸大小相配合,第一推动杆25与第二推动杆26相抵并且相抵面为楔形面,第一推动杆25的位置与第一滑动块21的位置相对应并且所对应的面为弧形面,使得第一滑动块21便于推动第一推动杆25向滑动槽23内部移动,永磁铁28位于滑动槽23的上方,转动轴11内开设有键槽,键槽的尺寸与平键34的尺寸相匹配,第一滑动块21为铁磁性材料制作而成,使得第一滑动块21上移时可以被永磁铁28进行吸引,从而限制第一推动杆25的移动,操作箱6内设置有采摘结构,第一锥齿轮32与第二锥齿轮33的尺寸大小相同,卡柱40的上方设置有拉环,竖直板36上设置有卡柱40的限位装置。
本发明在进行工作时,首先将网块17与承载网18构成一体的结构搭载在承载箱8上,通过拉动提手22,使得第一滑动块21向上移动至与永磁铁28配合,在这个过程中,第一推动杆25被第一滑动块21推动向滑动槽23内部移动,第二推动杆26被第一推动杆25推动向上移动进而与卡槽27进行配合完成对网块17的限位,此时承载网18即可对果实进行拾取作业。
在夏季进行拾取作业时,通过将将卡柱40脱离与柱槽39的配合,此时即可使得平键34与转动轴11的键槽进行配合,此时装置在电机10启动时,通过第一锥齿轮32与第二锥齿轮33的啮合作用将会使得扇叶16进行转动,由此可以为在驾驶室内工作的驾驶员进行送风过程,在冬季与春秋季装置进行工作时,通过将卡柱40与柱槽39进行配合,此时扇叶16将会脱离与动力装置的配合,因而扇叶16不会进行转动,使得不会在较为寒冷的天气下使驾驶员感受到严寒。
当需要将果实收集起来存储时,只需通过液压缸7将承载箱8放置在较低的位置,通过拉动提手22,使得第一滑动块21脱离与永磁铁28的接触解除对网块17的限位即可。
尽管本文较多地使用了主座1、万向轮2、驾驶室3、转动柱4、支撑板5、操作箱6、液压缸7、承载箱8、电机箱9、电机10、转动轴11、第一同步轮12、第二同步轮13、同步带14、风扇箱15、扇叶16、网块17、承载网18、固定块19、第一弹簧20、第一滑动块21、提手22、滑动槽23、第二弹簧24、第一推动杆25、第二推动杆26、卡槽27、永磁铁28、扇叶29、固定板30、第一转动轴31、第一锥齿轮32、第二锥齿轮33、平键34、圆盘35、竖直板36、第三弹簧37、第二滑动块38、柱槽39、卡柱40等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种农业用基于视觉检测智能机器人采摘装置附加的限制都是与本发明精神相违背的。
- 一种农业用基于视觉检测智能机器人采摘装置
- 一种基于机器视觉检测的机器人农业采摘装置