具有LIDAR传感器的不利天气条件检测系统
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及LIDAR(光检测和测距)系统,并且特别地涉及高分辨率闪光LIDAR(HFL)传感器,其检测诸如影响车辆的天气条件之类的不利条件,以及检测视野中的固体对象。
背景技术
用于高级驾驶员辅助系统中的LIDAR传感器在恶劣天气条件下经历显著的性能劣化。这些条件包括降雨、降雪、冰雹、毛毛雨、雾霾、烟雾、雾、在潮湿道路(高速公路)上行驶的车辆轮胎扬起的水滴形成的喷雾等。传感器的性能劣化是由于三个主要原因。首先,激光的能量被散射,这显著减小最大可检测距离。第二,来自雪花、雨滴和雾的返回物与来自固体对象的返回物相混淆。第三,由于来自天气对象的干扰,LIDAR图像或点云的质量下降。该劣化增加了对于检测车辆正在其中行驶的当前天气条件的需要,以便能够进入天气模式,在该模式下,在通知驾驶员接管后,某种功能性将被禁用。
在EP 3091342 A1中公开了一种用于检测诸如雨的天气的常规驾驶员辅助系统。该系统使用附加的通道用于不利天气检测,这与本专利中使用的技术相反,在本专利中,普通的对象检测通道用于天气和对象检测两者。该现有技术也在如下意义上受限,即它探测车辆前方非常有限的空间,使得可靠性成问题。此外,这种常规的检测方式不能区分天气条件的类型(诸如雨、雪、雾、喷雾等),因为该通道具有非常有限的分辨率。然而,使用本文公开的HFL传感器的天气检测由于其高分辨率和对lidar信号的快速采样率,可以可靠地检测和分类天气条件。
美国专利第8,879,049号公开了一种光学感测系统,其使用仅在传感器前面的短距离内与照射场重叠的专用光电二极管或接收器通道。光电二极管不能用于任何其他目的。该方法再次遭受相同问题,即它探测非常小的区域(几立方厘米(cm
因此,存在具有一种用于驾驶员辅助或自主车辆以使它们安全且可靠的鲁棒且有成本效益的天气检测和分类系统的需要。因此,该附加功能帮助车辆容易地监视其环境,并可靠地预测/通知性能劣化。
发明内容
本发明的目的是满足上面指出的需要。根据实施例的原理,该目的通过一种检测车辆的驾驶员辅助或自主车辆系统中不利天气条件的方法来实现。该方法提供了一种包括LIDAR传感器(特别是HFL传感器)的系统,该LIDAR传感器具有包括光源和照射光学器件的发射部分,以及具有接收光学器件和如HFL传感器中使用的用于接收反射光的光电检测器或光电检测器阵列的接收部分。接收光学器件与照射光学器件间隔开。照射光学器件和接收光学器件每个限定一个视场,其中视场在距传感器一定距离处重叠,从而限定固体对象感测区域。位于固体对象感测区域之外的区域限定了非重叠区域。光电检测器确定固体对象感测区域中是否存在指示其中固体对象的信号。相同的光电检测器还确定在非重叠区域中是否存在指示影响车辆的不利天气条件的信号。
根据实施例的另一方面,一种用于检测环境中不利条件的系统包括LIDAR传感器和接收部分,该LIDAR传感器具有包括光源和照射光学器件的发射部分,该接收部分具有接收光学器件和如HFL传感器中使用的用于接收反射光的光电检测器或光电检测器阵列。接收光学器件与照射光学器件间隔开。照射光学器件和接收光学器件每个限定一个视场,其中所述视场在距离传感器一定距离处重叠,从而限定固体对象感测区域。位于固体对象感测区域之外的区域限定了非重叠区域。光电检测器被构造和布置成当固体对象在固体对象感测区域中时检测至少一个信号,并且当非固体对象在非重叠区域中时检测至少一个信号。处理器电路与传感器电耦合,并且被构造和布置成处理从传感器获得的信号。
在参考随附附图考虑以下详细描述和所附权利要求——所有这些形成了本说明书的一部分——之后,本发明的其他目的、特征和特性,以及操作方法和结构的相关元件的功能、部件的组合和制造的经济性将变得更加清楚。
附图说明
从以下结合随附附图对本发明的优选实施例的详细描述中,将更好地理解本发明,其中相同的参考标号指代相同的部件,其中:
图1是根据本发明实施例的装备有高级驾驶员辅助或自主车辆系统的车辆的视图;
图2是图1的系统的示意图;
图3示出了图2的HFL传感器的顶部和底部像素的重叠距离;
图4示出了多重散射现象,其导致指示非重叠区域中天气的信号,通常,在非重叠区域中,HFL传感器应当是盲的;
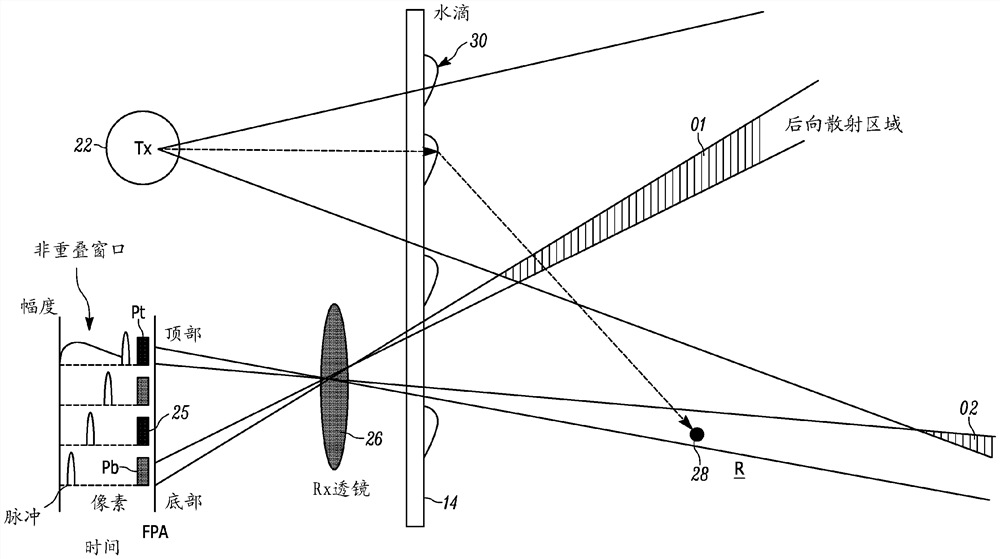
图5示出了光学窗口上的水滴,其引起非重叠区域中的信号。
具体实施方式
参考图1,根据一实施例,示出了总体以10指示的用于车辆12的高级驾驶员辅助或自主车辆系统。系统10包括LIDAR传感器13、优选地是大陆公司制造的高分辨率闪光LIDAR(HFL)传感器。传感器13典型地在车辆的外部(例如前保险杠17上),或者车辆的侧面上(诸如门之间),或者车辆的后部上,或者在车辆内或外的任何其他地方,以便利用激光15照射车辆之外的区,并且检测激光从部署在照射区中的对象的反射。控制单元16耦合到传感器13,以便处理从传感器13接收的信号。
参考图2,HFL传感器13包括发射部分18,发射部分18包括诸如激光二极管、固态激光器、气体激光器等光源20,以及诸如漫射器22之类的照射光学器件(Tx)。传感器13的接收部分24包括用于接收反射光的光电检测器,诸如PIN光电二极管或光电检测器阵列25,并且包括诸如透镜26之类的接收光学器件(Rx)。照射光学器件(Tx)与外壳27中的接收光学器件(Rx)间隔开。
与普通相机不同,HFL传感器13是有源传感器,它具有其自己的照射(激光二极管20),所述照射具有限定的发散度或视场。由于机械原因和设计要求,照射光学器件Tx和接收光学器件Rx并不位于同一定位处。作为结果,照射视场(FOV)和接收视场不重叠,直到传感器前面称为“重叠距离”的某个距离位置。重叠距离是像素的FOV与辐射(激光)的照射场重叠所需的距离。该重叠距离取决于照射光学器件和接收光学器件之间的分离距离。接收光学器件Rx和照射光学器件Tx之间的距离越大,重叠距离越大。此外,由于HFL传感器13的检测器阵列25具有多个像素(数千个),因此这些像素中的每一个都具有由它们在焦平面阵列(FPA)上的定位给出的它们自己的重叠距离。
参考图3,在该特定实施例中,照射光学器件或漫射器22位于接收光学器件或透镜26的上方。位于FPA顶部处的像素(Pt)向下看,而位于底部处的像素(Pb)向上看。由于该配置,底部像素比顶部像素更早地与照射重叠。阴影区O1、O2指示其中像素的视场(FOV)(通过透镜26)和照射光学器件22 FOV重叠或相交的区域,其中这些区域限定了固体对象感测区域。在该相交之前或该相交之外,检测器阵列25的像素无法看到任何固体对象(非漫射对象)。这被称为“非重叠区域”R或“盲窗口”。
然而,由于特殊的光学现象(例如来自雾、喷雾、雨、雪或其他非固体对象的多重散射),光电二极管或检测器阵列25可以检测到盲窗口中的信号。因此,该信号在非重叠区域R中的存在充当不利天气条件(雪、喷雾、雾等)存在的指纹。取决于照射光学器件和接收光学器件之间的距离以及像素在FPA上的位置,该非重叠区域R为几厘米到几米。边缘像素通常具有较长的重叠距离。
图4示出了多重散射现象,其中光首先从天气粒子28(诸如雾粒子、喷雾粒子、雨滴和雪花)反弹,并且然后被像素的视野中的第二粒子28’散射。当粒子数量高时,如在雾、喷雾或大雨的情况下,该多重散射现象可能性高。该现象还导致光电二极管或检测器阵列25检测到非重叠区域R中的信号,所述信号指示不利天气条件的存在。
此外,参考图5,当来自喷雾、雨或雾的水滴30沉积在光学窗口14上时,可能引起在非重叠区域R中的信号。在这种情况下,光学窗口14上的液滴30扭曲照射场,从而引起过度照射。如图5中所示,这在非重叠区域R中创建信号,所述信号充当不利天气条件存在的指纹。
本文所使用的“雾粒子”是通常在几微米的范围内的悬浮在空气中的小液滴。“喷雾”是当汽车在潮湿道路之上行驶时产生的一种类似雾的物质。这是当地面上的水被车辆轮胎踢起从而在空气中形成小水滴云时形成的。喷雾液滴的大小通常比雾滴更大,并且由于来自车辆的空气湍流而是高度动态的行为。这通常是在高速公路上以高速形成的。简单来说,“散射”是其中入射到粒子上的光在所有方向上(通常以不同程度)散射的现象。取决于粒子相对于入射光波长的大小,散射行为改变。在HFL传感器14的激光的发射波长中,雾粒子以所谓的“米氏散射”与光交互。对于小尺寸粒子,该散射更多的是全方向的,而对于较大的粒子,其更多的是向前散射的。
根据该实施例,在通过检测上面指出的非重叠区域中的信号来检测天气条件之后,由控制单元16(图2)的处理器电路34执行算法,该算法从HFL传感器13的数据中滤除天气影响或者标记点云数据中的点,以区分它们是真实对象还是天气相关对象(雪花、雨滴、喷雾等)。存储器电路36存储传感器数据。
回到图2,增加非重叠距离的关键参数是Tx光学器件22和Rx光学器件26之间的距离。这可以通过在水平方向上或在垂直方向上或者在垂直和水平这两个方向上增加Tx光学器件和Rx光学器件之间的间隔来实现。如所示的,尽可能多地在垂直和水平这两个方向上位移Tx光学器件22和Rx光学器件26对于天气检测是优选的。然而,增加Rx光学器件26和Tx光学器件22之间的间隔减小了能够测量的最小距离。因此,使用平衡来设置Rx光学器件和Tx光学器件之间的该距离。
一般地,Tx光学器件22和Rx光学器件26路径在低光束发散方向(可以是水平的或垂直的)上的轻微分离产生较大的重叠距离。因此,在照射的低发散方向上,Rx光学器件和Tx光学器件的更大分离是优选的。
本文描述的操作和算法可以被实现为具有如描述的处理器电路34的微控制器或控制单元16内的可执行代码,或者被存储在独立的计算机或机器可读的非暂时性有形存储介质上,这是基于使用一个或多个集成电路实现的处理器电路对代码的执行而完成的。所公开的电路的示例实现方式包括在诸如可编程逻辑阵列(PLA)、现场可编程门阵列(FPGA)之类的逻辑阵列中实现的硬件逻辑,或者通过诸如专用集成电路(ASIC)之类的集成电路的掩模编程实现的硬件逻辑。这些电路中的任何一个也可以使用基于软件的可执行资源来实现,该可执行资源由诸如微处理器电路(未示出)的对应内部处理器电路来执行,并且使用一个或多个集成电路来实现,其中存储在内部存储器电路中的可执行代码的执行引起实现处理器电路的(一个或多个)集成电路将应用状态变量存储在处理器存储器中,从而创建执行如本文所述的电路操作的可执行应用资源(例如,应用实例)。因此,在本说明书中,术语“电路”的使用指代使用一个或多个集成电路实现的并且包括用于执行所述操作的逻辑的基于硬件的电路,或者包括处理器电路(使用一个或多个集成电路实现)的基于软件的电路这两者,该处理器电路包括处理器存储器的保留部分,用于存储通过由处理器电路执行可执行代码而修改的应用状态数据和应用变量。存储器电路36可以例如使用诸如可编程只读存储器(PROM)或EPROM的非易失性存储器和/或诸如DRAM的易失性存储器等来实现。
实施例的系统10的优点包括:
-由于非重叠信号在许多像素上可用而导致的更好的天气检测可靠性。这消除了由于噪声而导致的错误天气检测的机会,
-当像素靠近激光照射时,对检测天气相关粒子更敏感,
-不需要附加的硬件,
-用于天气检测的相同像素阵列或光电二极管25用于重叠区域中的固体对象检测,
-容易的实现方式,
-实现方式针对高分辨率LIDAR很好地专门化,
-处理器电路34可以对非重叠信号应用图像处理,因为它在许多像素上可用,
-对非重叠信号的图像处理可以在降水(雨、雪)和非降水(雾、喷雾)天气之间进行区分,
-消除了对于看向照射场之外的附加专用光电二极管或接收器通道的需要,
-对天气检测更敏感,因为它具有有限的重叠距离,
-信号理论上在几乎所有像素中都是可用的,这增加了天气检测的可靠性,不同于专用的单个或几个像素,并且在多个像素之上平均预重叠信号给出了可靠的天气检测。
尽管已经公开了上述系统和方法来检测不利的天气条件,但是也可以采用使用HFL传感器13的其他方法。例如,另一种方法包括近距离处的集群处理。雨和雪具有小的集群,是圆形的,是不持久的。也可以考虑强度和反射率。雾和喷雾具有大的集群,具有FOV的形状,是持久的和透明的。其他方法可以包括点云处理,监视集群重叠、落地后(postground)等,或监视多脉冲检测。
尽管该实施例已经被公开用于驾驶员辅助系统或自主车辆系统,但是系统10可以用于其他不利环境中,诸如用于在多尘或烟雾弥漫的环境中进行检测。此外,系统10可以用作气象应用的天气传感器。
前述优选实施例出于说明本发明的结构和功能原理以及说明采用优选实施例的方法的目的被示出和描述,并且在不脱离这样的原理的情况下经受改变。因此,本发明包括被涵盖在以下权利要求范围内的所有修改。
- 具有LIDAR传感器的不利天气条件检测系统
- 具有LIDAR传感器的阻挡检测和天气检测系统