一种哈特曼传感器的绝对标定方法
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及夏克-哈特曼波前传感器领域,尤其涉及一种哈特曼传感器的绝对标定方法。
背景技术
哈特曼波前传感器是使用微透镜阵列分割并采集入射波前信息的一种检测装置,首先将待测波前进行采样,得到光斑图像;然后选取合理的质心算法得到各个子光斑图像的质心位置,再从中减去标定质心位置,得到波前斜率;最后通过波前复原算法,由斜率信息复原出待测波前,完成波前探测。
由于其使用方便、复原能力强,哈特曼波前传感器已经被应用于高精度成像、自适应光学、大气湍流模拟、人眼成像等技术领域。在广泛应用实践中,使用前需要对哈特曼波前传感器进行标定。标定哈特曼的目的,一是消除光学加工、设备组装过程中导致的系统误差;二是测算复原波前对应实际被测波前的比例系数。
目前的哈特曼测量误差标定方法有相差板标定法和球面波标定法。
其中,相差板标定法需要通过对比相差检测装置和夏克哈特曼波前传感器分别检测的相差板的相差来确定误差,因此引入了相差检测装置——通常为干涉仪——的使用,也就导致了需要额外计算干涉仪的误差。
而球面波标定,通过哈特曼波前传感器直接探测点光源发出球面波,复原后通过与理论计算的球面波进行比较,从而得到复原波前与待测波前的比例系数。但这种方法只能产生近距离高曲率的球面波前,无法产生平面波或低曲率的球面波前,因此本发明旨在发明一种使用低曲率球面波前对哈特曼波前传感器进行标定的方法。
发明内容
本发明提供的一种哈特曼传感器的绝对标定方法,主要解决的技术问题是:现有哈特曼标定方法需要引入了额外误差因素,或者使用近距离高曲率的球面波前,无法用平面波或低曲率的球面波前对哈特曼波前传感器标定,这会导致标定过程中出现较大误差。
为解决上述技术问题,本发明提供一种哈特曼传感器的绝对标定方法,包括:
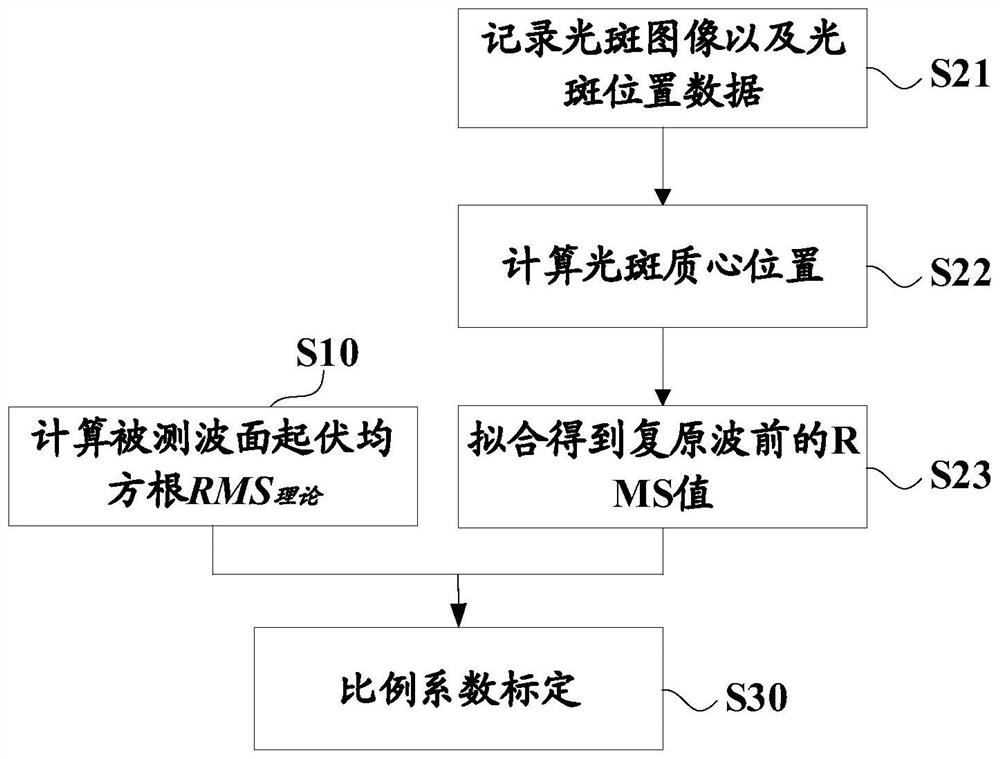
S10、根据球面波数据,计算被测波面起伏均方根RMS
S20、计算复原波前的RMS值,包括:
S21、通过实验记录具有不同波前的球面波前在哈特曼波前传感器上的接收器上形成的光斑图像以及光斑位置数据;
S22、根据载入的光斑图像以及光斑位置数据,利用如下公式(1)计算哈特曼波前传感器上坐标为(n,m)的微透镜对应的光斑质心位置(x
微透镜对应的接收器像素数为N*M个,I
S23、使用Zernike多项式,如下公式(2)所示,对被测波前进行拟合得到复原波前的RMS值;
式中,a
S30、通过计算所述复原波前的RMS值与所述被测波面起伏均方根RMS
进一步的,所述球面波利用光纤生成点光源,通过透镜产生。
进一步的,所述球面波数据包括透镜焦距f、点光源相对于透镜焦点的位移 d以及透镜的通光口径r;所述根据球面波数据,计算被测波面起伏均方根 RMS
通过如下公式(3):
式中,PV为球面波顶点到通光口的距离;
所述球面波顶点到通光口的距离PV通过如下公式(4)计算得到:
式中,R为球面波半径;
所述球面波半径R通过如下公式(5)计算得到:
可选的,所述复原波前的RMS值为所述Zernike多项式的第三阶多项式系数。
本发明的有益效果是:
根据本发明提供的一种哈特曼传感器的绝对标定方法,包括:S10、根据球面波数据,计算被测波面起伏均方根RMS
附图说明
图1为本发明实施例一的一种哈特曼传感器的绝对标定方法流程示意图;
图2为本发明实施例一的标定原理结构示意图;
图3为本发明实施例一的标定效果示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,下面通过具体实施方式结合附图对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
实施例一:
本实施例提供一种哈特曼传感器的绝对标定方法,请参见图1,主要包括如下:
S10、根据球面波数据,计算被测波面起伏均方根RMS
球面波利用光纤生成点光源,通过透镜产生。
球面波数据包括透镜焦距f、点光源相对于透镜焦点的位移d以及透镜的通光口径r;所述根据球面波数据,计算被测波面起伏均方根RMS
通过如下公式(6):
式中,RMS
式中,R为球面波半径;
所述球面波半径R通过如下公式(8)计算得到:
S20、计算复原波前的RMS值,包括:
S21、通过实验记录具有不同波前的球面波前在哈特曼波前传感器上的接收器上形成的光斑图像以及光斑位置数据;
S22、根据载入的光斑图像以及光斑位置数据,利用如下公式(9)计算哈特曼波前传感器上坐标为(n,m)的微透镜对应的光斑质心位置(x
微透镜对应的接收器像素数为N*M个,I
S23、使用Zernike多项式,如下公式(10)所示,对被测波前进行拟合得到复原波前的RMS值;
式中,a
S30、通过计算所述复原波前的RMS值与所述被测波面起伏均方根理论值 RMS
图2为本发明的标定原理,图中f为焦距,d为光源相对于焦点的位移,R为球面波半径,r是通光口径,PV是球面波顶点到通光口的距离。使用光纤生成点光源,通过透镜产生待哈特曼波前传感器处理的波前。当点光源放置于透镜焦点位置时,根据几何光学原理,如式(11)所示,点光源波前穿过透镜后会形成平面波前,相当于光源从无穷远处入射。
式(11)是透镜成像原理,其中f为透镜焦距,v为像距处于透镜左边,u为物距位置位于透镜右边。由于光路可逆,可以认为点光源处在像距v=d+f处,则点光源通过透镜后的波前等价于处于物距位置u=R的点光源处传播至透镜的球面波前,而球面波前的半径与物距同为R。通过式(11)计算可得R,然后使用R和通光口径r计算得到PV值。
根据球面波起伏均方根RMS
通过实验记录具有不同波前的低曲率球面波前在哈特曼波前传感器上的接收器上形成的光斑图像以及光斑位置数据。
根据载入的光斑图像以及光斑位置和式(15)计算哈特曼波前传感器上坐标为(x
微透镜对应的接收器像素数为N*M个,I
得到波前斜率向量后,通过使用Zernike多项式,如式(16)所示,对被测波前进行拟合可以得到复原波前的RMS值,其中a
Zernike多项式与微透镜对应位置的斜率有如下关系:
其中Z
其中,S为微透镜对应的归一化面积。
设斜率波前向量为G=(G
简记为:
G=DA
其中D为式(19)中的Z
相对于当前的使用光纤点光源发出高曲率球面波前的标定哈特曼的做法,本发明在近处具有更高精度。将式(13)代入式(14)后,对式(14)求取关于位移d的导数可以得到式(21):
同时,传统球面波前的生成与本发明的区别在于,传统球面波前的位移d与波前R是同一个量。所以可以直接使用R求导,得到:
以上两式为d产生误差时,RMS值的变化。使用f=2000mm,d取值为1毫米至15毫米,r为2mm作为输入对以上两式进行计算,比值变化计算结果显示如图3。由于本发明的波前曲率半径较小,将RMS
显然,如图3所示,在位移距离较小时,本发明产生的球面波前的RMS
显然,本领域的技术人员应该明白,上述本发明的各模块或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在计算机存储介质(ROM/RAM、磁碟、光盘)中由计算装置来执行,并且在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。所以,本发明不限制于任何特定的硬件和软件结合。
以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种哈特曼传感器的绝对标定方法
- 一种使用球面波前绝对标定哈特曼-夏克传感器的方法