浸润式光刻系统使用方法
文献发布时间:2023-06-19 13:27:45
技术领域
本揭露是关于一种浸润式光刻系统的使用方法。
背景技术
随着技术节点的缩小,半导体装置中的元件之间的邻近度增加。光刻系统用于将图案自光罩转移至晶圆,以便定义半导体装置中的元件的位置。光刻系统将光束引导至光罩,以便将来自光罩的图案给予光束。然后将光束引导至晶圆,以便例如使用光阻剂材料将图案转移至晶圆。
浸润式光刻用于将图案自光罩转移至晶圆,以获得线间距为90纳米(nm) 或更小的图案。浸润式光刻在透镜系统与晶圆之间使用浸润液,以减小透镜系统与晶圆之间的折射率变化量。减小折射率变化量有助于避免用于图案化晶圆的光折射或弯曲。结果,提高了晶圆图案化的精度,从而允许将图案转移至具有高元素密度的晶圆上。
发明内容
根据本揭露一实施例,一种浸润式光刻系统的使用方法包括:通过在平行于晶圆台的顶面的平面中移动晶圆台以校准浸润罩;移动晶圆台,以将浸润罩设置于晶圆台上的粒子捕获区域上;移动晶圆台,以在粒子捕获区域上定义二维选路轨迹以及在粒子捕获区域上定义了二维选路轨迹后,移动晶圆台以将浸润罩设置于晶圆台上的晶圆上。
附图说明
当结合随附诸图阅读时,得自以下详细描述最佳地理解本揭露的各种态样。应强调,根据工业上的标准实务,各种特征并未按比例绘制且仅用于说明目的。事实上,为了论述清楚,可任意地增大或减小各种特征的尺寸。
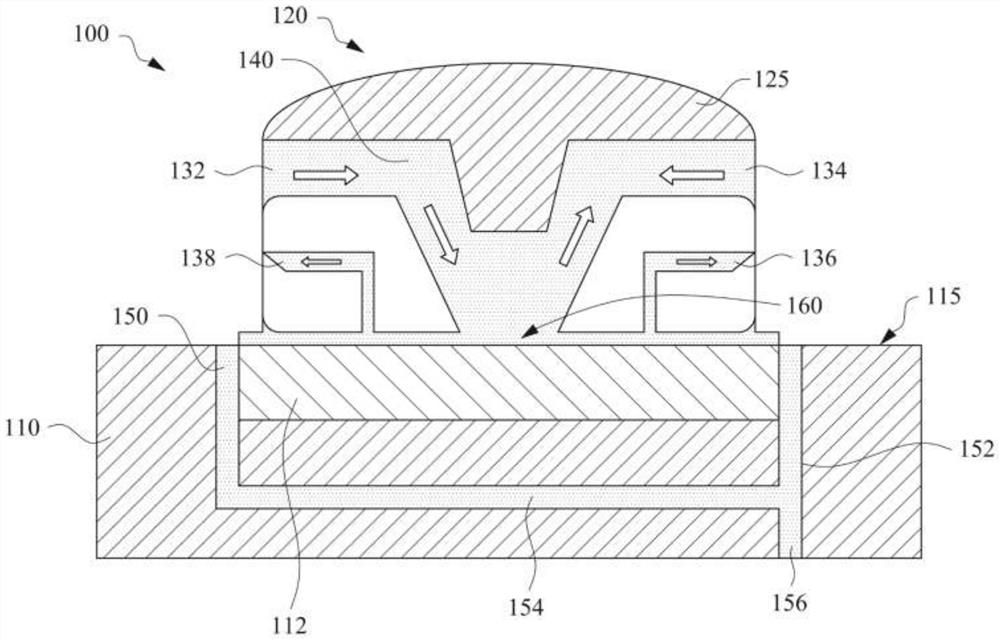
图1为根据一些实施例的浸润式光刻系统的剖面图;
图2A至图2C为根据一些实施例的晶圆台的上视图;
图3A至图3F为根据一些实施例的沿粒子捕获区域的选路路径的上视图;
图4为根据一些实施例的用于控制浸润式光刻系统的系统示意图;
图5为根据一些实施例的使用浸润式光刻系统的方法流程图;
图6为根据一些实施例的用于控制浸润式光刻系统的控制器示意图。
【符号说明】
100:浸润式光刻系统
110:晶圆台
112:晶圆
115:顶面
120:浸润罩
125:透镜系统
132:浸润液输入端口
134:浸润液输出端口
136:孔
138:孔
140:浸润液
150:吸回线
152:吸回线
154:吸回线
156:排水管
160:缝隙
200A:晶圆台
200B:晶圆台
200C:晶圆台
210:感测器
220:感测器
230:感测器
240:粒子捕获区域
240’:粒子捕获区域
240”:粒子捕获区域
300A:选路路径
300B:选路路径
300C:选路路径
300D:选路路径
300E:选路路径
300F:选路路径
310A:轨迹
310B:轨迹
310C:轨迹
310D:轨迹
310E:轨迹
310F:轨迹
400:系统
410:控制器
420:浸润罩
430:晶圆台马达
440:浸润液流量马达
500:方法
510:操作
520:操作
530:操作
540:操作
550:操作
600:控制器
602:处理器
604:记忆体
606:计算机程序码
607:指令
608:总线
610:I/O接口
612:网络接口
614:网络
616:流动速率
618:压力
620:台位置
622:罩位置
X:尺寸
X’:尺寸
X”:尺寸
Y:尺寸
Y”:尺寸
具体实施方式
以下揭示的实施例内容提供了用于实施所提供的标的的不同特征的许多个不同实施例,或实例。下文描述了元件和布置的特定实例以简化本案。当然,这些实例仅为实例且并不意欲作为限制。例如,在以下描述中的第一特征在第二特征之上或上方的形式可包含其中第一特征与第二特征直接接触形成的实施例,且亦可包含其中可于第一特征与第二特征之间形成额外特征,以使得第一特征与第二特征可不直接接触的实施例。此外,本案可在各个实例中重复元件符号及/或字母。此重复是用于简便和清晰的目的,且其本身不指定所论述的各个实施例及/或配置之间的关系。
此外,诸如“在……下方”、“在……之下”、“下部”、“在……之上”、“上部”等等空间相对术语可在本文中为了便于描述的目的而使用,以描述如附图中所示的一个元件或特征与另一元件或特征的关系。空间相对术语意欲涵盖除了附图中所示的定向之外的在使用或操作中的装置的不同定向。装置可经其他方式定向(旋转90度或以其他定向)并且本文所使用的空间相对描述词可同样相应地解释。
由于使用浸润液,浸润式光刻系统能够可靠地转移具有90纳米(nm)或更小的间距密度的图案。间距密度为图案中相邻元素之间的间距。然而,浸润液亦易于将存在于晶圆台上的粒子输送至晶圆上方。晶圆上的粒子会增加对晶圆各部分进行不正确图案化的风险。晶圆上未正确图案化的部分更有可能导致成品中的不可操作装置。
晶圆图案化制程涉及透镜系统与晶圆之间的相对运动。在一些实施例中,透镜系统可相对于晶圆移动。在一些实施例中,晶圆可相对于透镜系统移动。在一些实施例中,透镜系统及晶圆均为可移动的。由浸润液输送的粒子倾向于累积在晶圆上的首先定位透镜系统与晶圆重叠的位置上,亦即,通过在晶圆上方移动透镜系统或在透镜系统下方移动晶圆。粒子在该位置处累积的原因是由于支撑晶圆的晶圆台与图案化的晶圆表面之间的表面性质变化。在某些情况下,晶圆台的表面具有亲水特性。在某些情况下,图案化的晶圆表面具有疏水特性。在某些情况下,浸润液中含有水。由于表面性质变化,在透镜系统最初与晶圆重叠的位置处,粒子具有由浸润液输送至晶圆的趋势。粒子阻碍或散射来自浸润式光刻系统的光,此举增加了在其上具有粒子的晶圆部分中制造错误的风险。
为了减少或消除输送至晶圆的粒子,当前描述包括晶圆台上的粒子捕获区域。使透镜系统与粒子捕获区域重叠,并在与晶圆重叠之前沿着粒子捕获区域穿过选路路径。粒子捕获区域具有类似于晶圆的表面性质。结果,由浸润液输送的粒子收集在粒子捕获区域上。通过在粒子捕获区域上捕获粒子,减少了或完全避免了随后输送至晶圆的粒子数量。与其它方法相比,在晶圆图案化期间晶圆上减少的粒子数量改善了使用包括粒子捕获区域的浸润式光刻系统的制程的生产率。
图1为根据一些实施例的浸润式光刻系统100的剖面图。浸润式光刻系统 100包括用以支撑晶圆112的晶圆台110。在一些实施例中,晶圆台110可在平行于晶圆台110的顶面115的平面中移动。浸润罩120在晶圆台110上方。浸润罩120包括透镜系统125,用以将来自光罩(未示出)的光束引导至晶圆 112,以使晶圆图案化。浸润罩120进一步包括用以接收浸润液140的浸润液输入端口132。浸润罩120进一步包括用以输出浸润液140的浸润液输出端口 134。浸润罩120进一步包括亦用以输出浸润液140的孔136及孔138。为简单起见,孔136及孔138的末端示出为切断。本领域具有通常知识者将认识到,孔136及孔138用以将浸润液140输送出浸润罩120。晶圆台110进一步包括用以排出晶圆台110的顶面115上的浸润液的吸回线150、152及154。排水管156允许吸回线150、152及154分配浸润液140。浸润液140在透镜系统 125与晶圆112之间,以提高图案化晶圆112的精度。在浸润罩120的最底表面与晶圆112的顶面或晶圆台110的顶面115之间存在缝隙160。浸润液140 在缝隙160内。
晶圆台110在图案化制程中支撑晶圆112。在一些实施例中,晶圆台110 使用真空吸盘(未示出)将晶圆112保持在适当的位置。在一些实施例中,晶圆台110附接至马达,以调整晶圆台110相对于浸润罩120的位置。在一些实施例中,马达包括步进马达、齿条齿轮马达、压电马达、伺服马达或其他合适的马达。在一些实施例中,晶圆台110用以在平行于顶面115的平面上平移。在一些实施例中,晶圆台110用以绕垂直于顶面115的轴线旋转。在一些实施例中,晶圆台110用以绕平行于顶面115的轴线旋转。本领域具有通常知识者将认识到,这些运动的组合在本揭露内容的范畴内。在一些实施例中,移动晶圆台110的速度大于0.001毫米/秒(mm/s)。在一些实施例中,移动晶圆台110的速度在约0.001mm/s至约1mm/s的范围内。在某些情况下,若移动晶圆台110 的速度太快,则由于浸润液140的飞溅而增加将粒子推至晶圆112上的风险。在某些情况下,若移动晶圆台110的速度太慢,则增加了粒子由粒子捕获区域 (如下所述)捕获的风险。粒子捕获区域于以下详细描述。粒子捕获区域为顶面 115的区域,该区域具有与顶面115的其他部分不同的表面性质。
用于支撑晶圆112的晶圆台110的一部分相对于顶面115凹入,以使晶圆 112的顶面与顶面115基本共面。顶面115与晶圆112的顶面之间的偏移(若存在)为晶圆上多个层的结果。例如,在靠近晶圆112的基板形成元件期间,晶圆112的总厚度小于在远离基板形成元件期间的晶圆112的总厚度。
在一些实施例中,感测器(参照图2A至图2C)在顶面115中。在一些实施例中,顶面115包括用于反射来自透镜系统125的光的反射镜部分。部分顶面 115具有亲水特性,使浸润液140在顶面115上扩散。
晶圆112由晶圆台110支撑。晶圆112由透镜系统125通过浸润液140 发射的光束图案化,然后入射在晶圆112上。此光束改变了晶圆112的最上层的化学性质。在一些实施例中,晶圆112的最上层包括光阻剂材料。在一些实施例中,晶圆112的最上层包括硅。在一些实施例中,使用机械手臂(未示出) 将晶圆112放置在晶圆台110上及/或自晶圆台110移除。
浸润罩120用以将浸润液140引入浸润罩120与晶圆台110之间的缝隙 160中,并自透镜系统125发射光束以图案化晶圆112。在一些实施例中,浸润罩120为固定的。在一些实施例中,浸润罩能够在平行于顶面115的平面中平移运动。在一些实施例中,马达用于使浸润罩120平移。在一些实施例中,马达包括步进马达、齿条齿轮马达、压电马达、伺服马达或其他合适的马达。在一些实施例中,用于移动浸润罩120的马达为与用于移动晶圆台110的马达相同类型的马达。在一些实施例中,用于移动浸润罩120的马达为与用于移动晶圆台110的马达不同类型的马达。
透镜系统125用以控制光束自光源(未示出)到光罩然后到晶圆112的传播。在一些实施例中,光源用以发射光束,诸如紫外线(ultraviolet,UV)或极端紫外线(extreme UV,EUV)光源。在一些实施例中,光源包括波长为436nm(G 线)或365nm(I线)的汞灯、波长为248nm的氟化氪(Krypton Fluoride,KrF)准分子激光器、波长为193nm的氟化氩(ArgonFluoride,ArF)准分子激光器、波长为157nm的氟化物(Fluoride,F2)准分子激光器或具有所需波长(例如,低于约100nm)的其他光源。在一些实施例中,透镜系统125没有反射镜。在一些实施例中,透镜系统125为折反射系统。在一些实施例中,透镜系统125由反射系统取代。
浸润液输入端口132用以接收来自供应源(未示出)的浸润液140,并将浸润液140提供至缝隙160。浸润液输入端口132连接至可控泵(未示出),以控制通过浸润罩120的浸润液140的流动速率及压力。在一些实施例中,通过浸润液输入端口132的浸润液140的流动速率在约1公升/分钟(liter/minute,L/min) 至约4L/min的范围内。在某些情况下,若浸润液140的流动速率太低,则浸润液140不能将粒子自晶圆台110移动至粒子捕获区域。在某些情况下,若浸润液140的流动速率太高,则浸润液140导致粒子冲洗至晶圆112上的风险增加。在一些实施例中,穿过浸润液输入端口132的浸润液140的压力小于或等于70千帕(kilopascal,kPa)。在一些实施例中,穿过浸润液输入端口132的浸润液140的压力在约10kPa至约70kPa的范围内。在某些情况下,若浸润液 140的压力太高,则在晶圆图案化制程期间损坏晶圆112的风险增加。在某些情况下,若浸润液140的压力太低,则浸润液140不会将粒子自晶圆台110 移至粒子捕获区域。
浸润液输出端口134用以允许浸润液140流出浸润罩120。在某些情况下,离开浸润液输出端口134的浸润液140收集在水库中。在一些实施例中,离开浸润液输出端口134的浸润液140被回收并且通过浸润液输入端口132重新引入浸润罩120。在一些实施例中,离开浸润液输出端口132的浸润液140在回收之前进行过滤或其他处理。
孔136及孔138类似于浸润液输出端口134,但包括浸润罩120的最底表面上的开口。在某些情况下,离开孔136或孔138中的至少一者的浸润液140 收集在水库中。在一些实施例中,离开孔136或孔138中的任一者的浸润液 140被回收并且通过浸润液输入端口132重新引入浸润罩120。在一些实施例中,离开孔136或孔138中的任一者的浸润液140在回收之前进行过滤或其他处理。在一些实施例中,孔136或孔138中的至少一者流体连接至浸润液输出端口134。
浸润液140用于减小透镜系统125与空气之间的折射率差。当光束自具有不同折射率的一种介质移动至另一种介质时,该光束被折射,即弯曲及/或反射。光束的折射降低了光束在晶圆112上的定位精度。包括浸润液140的话可降低折射量,由此增加了离开透镜系统125的光束在晶圆112上的定位精度。在一些实施例中,浸润液140在193nm的波长下具有1.44或更大的折射率。在一些实施例中,浸润液140包括水。在一些实施例中,浸润液140包括去离子水(deionized water,DIW)。在一些实施例中,浸润液140包括水基溶液,水基溶液包括添加剂,诸如酸、盐或聚合物。在一些实施例中,浸润液140包括气体。
晶圆台110包括用以去除缝隙160中的部分浸润液140的吸回线150、152 及154。吸回线150在晶圆112的第一侧上。吸回线152在晶圆112与第一侧相反的第二侧上。吸回线154连接晶圆112下方的吸回线150及152。吸回线 150、152及154连接至排水管156,以自吸回线150、152及154去除浸润液 140。在一些情况下,离开排水管156的浸润液140收集在水库中。在一些实施例中,离开排水管156的浸润液140被回收并且通过浸润液输入端口132 重新引入浸润罩120。在一些实施例中,离开排水管156的浸润液140在回收之前进行过滤或其他处理。在一些实施例中,排水管156连接至孔136或孔138中的至少一者或浸润液输出端口132。在一些实施例中,省略了吸回线154,并且吸回线150及152中的每一者延伸至晶圆台110的后表面至排水管,例如排水管156。
图2A为根据一些实施例的晶圆台200A的俯视图。晶圆台200A可用作浸润式光刻系统100(图1)中的晶圆台110。晶圆台200A支撑晶圆112。晶圆台200A包括在晶圆台200A的第一角落的第一感测器210。晶圆台200A包括在晶圆台200A的第二角落的第二感测器220。晶圆台200A包括在晶圆台200A 的第三角落的第三感测器230。晶圆台200A进一步包括粒子捕获区域240。粒子捕获区域240具有在第一方向上的尺寸X及在垂直于第一方向的第二方向上的尺寸Y。粒子捕获区域240与晶圆以及感测器210、220及230中的每一者分离。图2A包括箭头,箭头指示如浸润罩120(图1)的浸润罩在晶圆台 200A上的路径。如上所述,可通过晶圆台200A或浸润罩的移动来实现浸润罩及晶圆台200A的相对移动。
浸润罩自第一感测器210移动至第二感测器220,然后移动至第三感测器 230,以校准浸润罩来确定浸润罩与晶圆台200A之间的相对位置。在一些实施例中,第一感测器210、第二感测器220或第三感测器230中的至少一者包括聚焦感测器,以便确定浸润罩的透镜系统,例如透镜系统125(图1)是否正确聚焦。在一些实施例中,第一感测器210、第二感测器220或第三感测器230 中的至少一者包括覆盖误差感测器,以便确定晶圆台200A与浸润罩之间的相对位置。在一些实施例中,第一感测器210、第二感测器220或第三感测器230 中的至少一者包括能量感测器,以便确定离开浸润罩的光束的强度。在一些实施例中,第一感测器210为与第二感测器220及第三感测器230中的每一者相同的感测器。在一些实施例中,第一感测器210与第二感测器220或第三感测器230中的至少一者不同。在一些实施例中,第二感测器220不同于第三感测器230。在一些实施例中,第一感测器210、第二感测器220或第三感测器230 中的至少一者在除了晶圆台200A的角落之外的位置中。感测器210、220及230的位置不受特别限制,只要感测器不与晶圆112或粒子捕获区域240重叠即可。
粒子捕获区域240沿着晶圆台200A的表面,例如顶面115(图1)延伸。在通过使感测器210、220及230中的每一者与浸润罩重叠来校准浸润罩之后,浸润罩沿粒子捕获区域240行进。通过在晶圆台200A上沉积一层材料而形成粒子捕获区域240。材料具有与晶圆112相似的表面特性。相似的表面特性帮助粒子捕获区域240从浸润罩收集在校准移动期间累积的粒子。通过将粒子收集在粒子捕获区域240上,粒子不被传送至晶圆112上并且提高晶圆112的生产良率。
在一些实施例中,材料包括硅或氮氧化硅。在一些实施例中,材料包括光阻剂材料或另一合适的材料。在一些实施例中,尺寸X大于或等于26毫米 (mm)。在某些情况下,若尺寸X太小,则粒子被传送至晶圆112的风险增加。在一些实施例中,尺寸Y大于或等于33mm。在某些情况下,若尺寸Y太小,则粒子被传送至晶圆112的风险增加。
在一些实施例中,尺寸X小于26mm或尺寸Y小于33mm以浸润罩在粒子捕获区域240上方的选路路径而定。选路路径为浸润罩在粒子捕获区域240 上方的轨迹。在一些实施例中,随着选路路径的长度增加,粒子捕获区域240 的尺寸减小。在一些实施例中,在第一方向上的最小选路路径长度为26mm。在一些实施例中,第二方向上的最小选路路径长度为33mm。在某些情况下,若在第一方向上的选路路径长度太小,则粒子被传送至晶圆112的风险增加。在某些情况下,若在第二方向上的选路路径长度太小,则粒子被传送至晶圆 112的风险增加。图3A至图3F详细描述了选路路径的一些实施例。
图2B为根据一些实施例的晶圆台200B的上视图。晶圆台200B类似于晶圆台200A(图2A)。与晶圆台200A相比,晶圆台200B包括附加的粒子捕获区域240’。粒子捕获区域240’位于沿着晶圆台200B与粒子捕获区域 240的相同侧。粒子捕获区域240’在第二方向上具有与粒子捕获区域240相同的尺寸Y。在一些实施例中,粒子捕获区域240’在第二方向上具有与粒子捕获区域240不同的尺寸。粒子捕获区域240’在第一方向上具有尺寸X’。在一些实施例中,尺寸X’等于尺寸X。在一些实施例中,尺寸X’与尺寸X不同。在一些实施例中,尺寸X’大于或等于26mm。在某些情况下,若尺寸X’太小,则粒子被传送至晶圆112的风险增加。在一些实施例中,尺寸X’小于26mm 以粒子捕获区域240’上的选路路径的长度而定。在一些实施例中,粒子捕获区域240’包括与粒子捕获区域240相同的材料。在一些实施例中,粒子捕获区域 240’包括与粒子捕获区域240的材料不同的材料。
在一些实施例中,浸润罩选路在粒子捕获区域240及粒子捕获区域240’上。在一些实施例中,浸润罩仅选路在粒子捕获区域240或粒子捕获区域240’的一者上。在一些实施例中,浸润罩的选路选择基于晶圆112的最上层的材料。浸润罩选路在粒子捕获区240或粒子捕获区240’上,该粒子捕获区240或粒子捕获区240’具有与晶圆112的最上层的表面特性最相似的表面特性。
通过包括粒子捕获区域240’,晶圆台200B包括浸润罩与晶圆台200B之间的接口的附加变化。如上所述,接口的变化为粒子沉积或粘附至其下表面的原因。通过增加接口改变量,晶圆台200B能够降低将粒子输送至晶圆112的可能性。晶圆台200B包括两个粒子捕获区域。然而,本领域具有通常知识者将认识到,基于本揭露内容,两个以上的粒子捕获区域是可能的。
图2C为根据一些实施例的晶圆台200C的上视图。晶圆台200C类似于晶圆台200A(图2A)。与晶圆台200A相比,晶圆台200C包括附加的粒子捕获区域240”。粒子捕获区域240”位于沿着晶圆台200C与粒子捕获区域240的不同侧。粒子捕获区域240”在第二方向上具有尺寸Y”。在一些实施例中,尺寸Y”等于尺寸Y。在一些实施例中,尺寸Y”与尺寸Y不同。在一些实施例中,尺寸Y”大于或等于33mm。在某些情况下,若尺寸Y”太小,则粒子被传送至晶圆112的风险增加。在一些实施例中,尺寸Y”小于33mm以粒子捕获区域240”上的选路路径的长度而定。粒子捕获区域240”在第一方向上具有尺寸X”。在一些实施例中,尺寸X”等于尺寸X。在一些实施例中,尺寸X”与尺寸X不同。在一些实施例中,尺寸X”大于或等于26mm。在某些情况下,若尺寸X”太小,则粒子被传送至晶圆112的风险增加。在一些实施例中,尺寸X”小于26mm以粒子捕获区域240”上的选路路径的长度而定。在一些实施例中,粒子捕获区域240”包括与粒子捕获区域240相同的材料。在一些实施例中,粒子捕获区域240”包括与粒子捕获区域240的材料不同的材料。
在一些实施例中,浸润罩选路在粒子捕获区域240及粒子捕获区域240”上。在一些实施例中,浸润罩仅选路在粒子捕获区域240或粒子捕获区域240”的一者上。在一些实施例中,浸润罩的选路选择基于晶圆112的最上层的材料。浸润罩选路在粒子捕获区240或粒子捕获区240”上,该粒子捕获区240或粒子捕获区240”具有与晶圆112的最上层的表面特性最相似的表面特性。
通过包括粒子捕获区域240”,控制器能够选择浸润罩在晶圆台200C上方的选路路径,以在粒子捕获区域上移动浸润罩,粒子捕获区域如粒子捕获区域 240或粒子捕获区域240”,该粒子捕获区域的表面特性最接近晶圆112的表面特性。通过使用具有最接近于晶圆112的表面特性的粒子捕获区域,降低了粒子被传送至晶圆112的风险。例如,在一些实施例中,在晶圆112的表面特性最接近粒子捕获区域240”的情况下,将浸润罩围绕选路粒子捕获区域240 至粒子捕获区域240”。不管哪个粒子捕获区域在浸润罩的选路路径内,浸润罩的选路路径在经过粒子捕获区域之前都不会穿过晶圆112。在一些实施例中,浸润罩穿过粒子捕获区域240及粒子捕获区域240”。
图3A为根据一些实施例沿着粒子捕获区域240的选路路径300A的上视图。选路路径300A包括具有L形的轨迹310A。轨迹310A在第一方向上的总长度至少为26mm,以便降低粒子被传送至晶圆,例如晶圆112(图1及图2A 至图2C)的风险。轨迹310A在垂直于第一方向的第二方向上的总长度至少为 33mm,以便降低粒子被传送至如晶圆112的晶圆的风险。由于轨迹310A包括第一方向上的单一支脚及第二方向上的单一支脚,粒子捕获区域240的总尺寸在第一方向上至少为26mm,并且在第二方向上至少为33mm,以适应轨迹 310A在每一方向上的最小轨迹长度。
图3B为根据一些实施例沿着粒子捕获区域240的选路路径300B的上视图。选路路径300B包括轨迹310B。轨迹310B类似于轨迹310A。与轨迹310A 相比,轨迹310B具有U形形状。轨迹310B在第一方向上具有两个支脚,其中两个支脚相对于彼此成180度定向。在一些实施例中,由于轨迹310B在第一方向上具有两个支脚,因此与轨迹310A的粒子捕获区域240相比,轨迹310B 的粒子捕获区域240的整体尺寸减小。在一些实施例中,对于具有相对于彼此成180度定向并且平行于粒子捕获区域240的边缘的N个支脚的轨迹,对应的粒子捕获区域240的最小尺寸等于Ldx/N,其中Ldx为相应方向上的最小长度尺寸。例如,在一些实施例中,轨迹310B在第一方向上的粒子捕获区域240 的最小尺寸为13mm(26mm/2)。在一些实施例中,粒子捕获区域240大于最小尺寸。
图3C为根据一些实施例沿着粒子捕获区域240的选路路径300C的上视图。选路路径300C包括轨迹310C。轨迹310C类似于轨迹310A。与轨迹310A 相比,轨迹310C具有S形形状。轨迹310C在第一方向上具有多个支脚。然而,由于在一些实施例中,在第一方向上的支脚并没有彼此成180度定向,因此在第一方向上用于轨迹310C的粒子捕获区域240的最小尺寸为26mm。轨迹310C在第二方向上具有彼此成180度定向的5个支脚。因此,在一些实施例中,轨迹310C在第二方向上的粒子捕获区域240的最小尺寸为6.6mm(33 mm/5)。
图3D为根据一些实施例沿着粒子捕获区域240的选路路径300D的上视图。选路路径300D包括轨迹310D。轨迹310D类似于轨迹310C。与轨迹310C 相比,轨迹310D具有锯齿形状。轨迹310D具有彼此成180度定向的多个支脚。然而,轨迹310D的支脚相对于粒子捕获区域240的边缘成角度。轨迹310D 的粒子捕获区域240在第一方向及第二方向中的每一者上的最小尺寸视轨迹 310D的支脚的角度而定。在一些实施例中,设置粒子捕获区域240的最小尺寸,以使轨迹310D在第一方向上的总距离至少为26mm,并且在第二方向上至少为33mm。
图3E为根据一些实施例沿着粒子捕获区域240的选路路径300E的上视图。选路路径300E包括轨迹310E。轨迹310E类似于轨迹310C。与轨迹310C 相比,轨迹310E具有S形形状,其中在第一方向上的一个支脚比在第一方向上的另一支脚长。在一些实施例中,设置粒子捕获区域240的最小尺寸,以使轨迹310E在第一方向上的总距离至少为26mm,并且在第二方向上至少为33 mm。
图3F为根据一些实施例沿着粒子捕获区域240的选路路径300F的上视图。选路路径300F包括轨迹310F。轨迹310F类似于轨迹310B及轨迹310C 的组合。轨迹310F具有呈S形的第一部分及呈U形的第二部分。在一些实施例中,设置粒子捕获区域240的最小尺寸,以使轨迹310E在第一方向上的总距离至少为26mm,并且在第二方向上为至少33mm。
本领域具有通常知识者将认识到,图3A至图3F仅为选路路径的示例,并且其他选路路径形状皆在本揭露的范围内。
图4为根据一些实施例用于控制浸润式光刻系统的系统400示意图。系统 400包括控制器410。控制器410通讯浸润罩420、晶圆台马达430及浸润液流量马达440。在一些实施例中,控制器410使用有线连接进行通讯。在一些实施例中,控制器使用无线连接进行通讯。
控制器410用以控制浸润式光刻系统的不同部分,以引导浸润罩420与连接至晶圆台马达430的晶圆台上的至少一个粒子捕获区域重叠。控制器410 控制浸润罩420或晶圆台马达430中的至少一者,以便控制浸润罩420在晶圆台上的相对位置。在一些实施例中,控制器410用以控制浸润罩420的运动。在一些实施例中,控制器410用以控制晶圆台马达430的操作。在一些实施例中,控制器410用以控制浸润罩420的运动及晶圆台马达430的操作。在一些实施例中,控制器410接收即将图案化的晶圆的信息,晶圆例如晶圆112(图1 及图2A至图2C)的类型,并确定晶圆台上的哪个粒子捕获区域的表面特征最接近晶圆的表面特征。然后,控制器410控制浸润罩420及/或晶圆台马达430 以使浸润罩420与确定的粒子捕获区域重叠。控制器410亦接收与晶圆台上的每一粒子捕获区域的尺寸有关的信息,并确定浸润罩420在相应粒子捕获区域上的选路路径,例如选路路径300A-300F(图3A至图3F),以降低粒子被传送至晶圆的风险。如上所述,控制器410选择选路路径以在第一方向及第二方向中的每一者上在粒子捕获区域上行进最小距离。
控制器410进一步用以控制浸润液流量马达440。控制器410控制浸润液流量马达440,以便设定来自浸润罩420的浸润液的流动速率及压力。
控制器410用以接收例如来自感测器210、220及230(图2A至图2C)的信息,以便确定浸润罩420相对于晶圆台的位置。在一些实施例中,控制器410 进一步用以接收例如来自流量计的信息,以量测从浸润罩420流出的浸润液的流动速率及/或压力。基于该信息,控制器410能够控制系统400的不同组件,以便降低粒子被传送至晶圆的风险。因此,提高了晶圆的生产良率。
浸润罩420,例如浸润罩120(图1)将图案化的光束传送至晶圆台上的晶圆,例如晶圆112,并将浸润液传送至晶圆台。在一些实施例中,浸润罩420 为固定的。在一些实施例中,浸润罩420为可移动的。
晶圆台马达430用以在平行于晶圆台的顶面的平面中移动晶圆台,晶圆台例如晶圆台110(图1)。在一些实施例中,晶圆台马达430包括多个马达。例如,在一些实施例中,晶圆台马达430包括用于在第一方向上运动的第一马达及用于在垂直于第一方向的第二方向上运动的第二马达。在一些实施例中,晶圆台马达430包括步进马达、齿条齿轮马达、压电马达、伺服马达或另一合适的马达。
浸润液流量马达440用以控制从浸润罩420至晶圆台的浸润液,例如浸润液140(图1)的流量。在一些实施例中,浸润液流量马达440为浸润罩420的一部分。在一些实施例中,浸润液流量马达440为压电马达、伺服马达或另一合适的马达。
图5为根据一些实施例使用浸润式光刻系统的方法500流程图。方法500 可与系统100(图1)、晶圆台200A-200C(图2A至图2C)及/或系统400(图4) 一起使用。在操作510中,将晶圆,例如晶圆112(图1)放置在晶圆台上,晶圆台例如晶圆台110(图1)。晶圆台在晶圆台的顶面的一部分上具有粒子捕获区域。在一些实施例中,使用机械手臂将晶圆放置在晶圆台上。在一些实施例中,使用真空吸盘将晶圆固定在晶圆台上。在一些实施例中,晶圆台可在平行于晶圆台的顶面的平面中移动。在一些实施例中,在操作510之后,晶圆及晶圆台类似于图2A至图2C中的任一者中的布置。
在操作520中,校准浸润罩。通过将浸润罩放置在晶圆台中的感测器上方来校准浸润罩,例如浸润罩120(图1),以便精确地确定浸润罩相对于晶圆台的位置。在一些实施例中,浸润罩为固定的。在一些实施例中,浸润罩为可移动的。在一些实施例中,通过使用类似于图2A至图2C中的行进路径来校准浸润罩。
在操作530中,在粒子捕获区域上移动浸润罩。粒子捕获区域,例如,粒子捕获区域240(图2A至图2C)有助于从晶圆台收集或捕获粒子,以防止这些粒子输送至晶圆。在一些实施例中,通过移动晶圆台使浸润罩在粒子捕获区域上移动。在一些实施例中,通过移动浸润罩使浸润罩在粒子捕获区域上移动。
粒子捕获区域沿着晶圆台的顶面延伸。通过在晶圆台上沉积一层材料来形成粒子捕获区域。材料具有与晶圆相似的表面特性。相似的表面特性有助于粒子捕获区域从浸润罩收集在校准运动制程中累积的粒子。在一些实施例中,在操作530期间,在多个粒子捕获区域上移动浸润罩。
在一些实施例中,粒子捕获区域包括硅或氮氧化硅。在一些实施例中,材料包括光阻剂材料或另一合适的材料。在一些实施例中,浸润罩在粒子捕获区域上沿第一方向的最小行进距离为26mm。在某些情况下,若在第一方向上的行进距离太小,则会增加粒子被传送至晶圆的风险。在一些实施例中,浸润罩在粒子捕获区域上沿垂直于第一方向的第二方向的最小行进距离为33mm。在某些情况下,若在第二方向上的最小行进距离太小,则会增加粒子被传送至晶圆的风险。在一些实施例中,浸润罩以类似于图3A至图3F中的至少一条选路路径的方式在粒子捕获区域上移动。在一些实施例中,浸润罩以不同于图 3A至图3F中的选路路径的方式在粒子捕获区域上移动。
在操作540中,曝光晶圆。通过将图案化的光束从浸润罩的透镜系统,例如透镜系统125(图1)发射出并通过浸润液到达晶圆,浸润液例如浸润液140 (图1),使晶圆曝光。通过晶圆台与浸润罩之间的相对运动,在晶圆的表面上扫描图案化的光束。图案化的光束赋予图案感光层,感光层位于晶圆上。
在可选操作550中,冲洗粒子捕获区域。在曝光晶圆之后冲洗粒子收集区域有助于降低粒子在粒子捕获区域中累积的风险,这些粒子随后被输送至另一晶圆。在一些实施例中,使用浸润液冲洗粒子捕获区域。例如,将晶圆自晶圆台去除之后,使浸润液以高流动速率或压力通过晶圆台。在一些实施例中,使用水、去离子水或另一合适的冲洗材料冲洗粒子捕获区域。在一些实施例中,使用机械擦拭制程来冲洗粒子捕获区域。在一些实施例中,省略操作550。例如,在晶圆作为曝光制程的一部分被冲洗的一些实施例中,这种冲洗制程还将冲洗粒子捕获区域,并且省略单独的操作550。
图6为根据一些实施例用于控制浸润式光刻系统的控制器600示意图。控制器600包括硬件处理器602及具有编码的(即存储)计算机程序码606,即一组可执行指令的非暂时性计算机可读储存媒体604。计算机可读储存媒体604 亦用指令607编码,用于与诸如马达、泵等制造机器对接。处理器602通过总线608电性耦合至计算机可读储存媒体604。处理器602亦通过总线608电性耦合至I/O接口610。网络接口612亦通过总线608电性连接至处理器602。网络接口612连接至网络614,以便处理器602及计算机可读储存媒体604能够经由网络614连接至外部元件。处理器602用以执行编码在计算机可读储存媒体604中的计算机程序码606,以使控制器600可用于执行方法500中或相对于系统400所描述的部分或全部操作。
在一些实施例中,处理器602为中央处理器(central processing unit,CPU)、多重处理器、分散式处理系统、应用特定集成电路(application specific integratedcircuit,ASIC)及/或合适的处理单元。
在一些实施例中,计算机可读储存媒体604为电子系统、磁力系统、光学系统、电磁系统、红外线系统及/或半导体系统(或设备或装置)。例如,计算机可读储存媒体604包括半导体或固态记忆体、磁带、可移动计算机磁片、随机存取记忆体(random access memory,RAM)、只读记忆体(read-only memory, ROM)、刚性磁盘及/或光盘。在使用光盘的一些实施例中,计算机可读储存媒体604包括只读光盘记忆体(compact disk-read only memory,CD-ROM)、光盘读/写器(compact disk-read/write,CD-R/W)及/或数字影音光盘(digitalvideo disc, DVD)。
在一些实施例中,储存媒体604存储用以使控制器600执行方法500或系统400的操作的计算机程序码606。在一些实施例中,储存媒体604亦存储执行方法500或系统400的动作所需的信息以及在该性能执行期间产生的信息,诸如流动速率参数616、压力参数618、台位置参数620、罩位置参数622及/ 或一组可执行指令以执行方法500或系统400的操作。
在一些实施例中,储存媒体604存储用于与制造机器对接的指令607。指令607使处理器602能够产生制造机器可读的制造指令,以在制程期间有效地实施方法500或系统400的动作。
系统600包括I/O接口610。I/O接口610耦合至外部电路。在一些实施例中,I/O接口610包括键盘、小键盘、鼠标、轨迹球、触控板及/或游标方向键,用于将信息及命令传达至处理器602。
控制器600亦包括耦合至处理器602的网络接口612。网络接口612允许控制器600与网络614通信,一或多个其他计算机系统连接至该网络614。网络接口612包括无线网络接口,诸如BLUETOOTH、WIFI、WIMAX、GPRS 或WCDMA,或有线网络接口,诸如ETHERNET、USB或IEEE-1394。在一些实施例中,方法500或系统400在两个或更多个控制器600中实现,并且诸如流动速率、压力、台位置及罩位置的信息经由网络614在不同控制器600 之间交换。
控制器600用以接收与浸润液,例如浸润液140(图1)的流动速率有关的信息。然后将流动速率作为流动速率参数616存储在计算机可读媒体604中。控制器600用以通过I/O接口610或网络接口612接收与浸润液压力有关的信息。信息作为压力参数618存储在计算机可读媒体中604。控制器600用以通过I/O接口610或网络接口612接收与晶圆台,例如晶圆台110(图1)的位置有关的信息。信息作为台位置参数620存储在计算机可读媒体604中。控制器 600用以通过I/O接口610或网络接口612接收与浸润罩,例如浸润罩120(图 1)的位置有关的信息。信息作为罩位置参数622存储在计算机可读媒体604中。
在操作期间,处理器602执行一组指令以确定浸润罩与晶圆台的相对位置,以便在晶圆台的晶圆上移动浸润罩之前将浸润罩选路在粒子捕获区域上。处理器602亦执行指令,以在浸润罩的相对运动及晶圆的曝光期间控制浸润液的流动速率及压力。
本描述的态样关联于一种浸润式光刻系统。浸润式光刻系统包括浸润罩,其中浸润罩包括透镜系统。浸润式光刻系统进一步包括晶圆台,其中晶圆台可相对于浸润罩移动,并且晶圆台包括用于容纳晶圆的区域。浸润式光刻系统进一步包括第一粒子捕获区域,第一粒子捕获区域位于晶圆台上且位于用于容纳晶圆的区域外,其中第一粒子捕获区域包括硅、氮氧化硅或光阻剂材料。在一些实施例中,第一粒子捕获区域包括氮氧化硅。在一些实施例中,第一粒子捕获区域在平行于晶圆台的顶面的第一方向上的尺寸至少为26毫米(mm)。在一些实施例中,第一粒子捕获区域在平行于晶圆台的顶面的第二方向上的尺寸至少为33毫米,并且第二方向垂直于第一方向。在一些实施例中,浸润式光刻系统进一步包括位于晶圆台上的第二粒子捕获区域。在一些实施例中,第二粒子捕获区域包括与第一粒子捕获区域不同的材料。在一些实施例中,第二粒子捕获区域具有与第一粒子捕获区域不同的尺寸。在一些实施例中,第二粒子捕获区域位于沿着第一粒子捕获区域的晶圆台的相同侧。在一些实施例中,第二粒子捕获区域位于沿着第一粒子捕获区域的晶圆台的不同侧。
本描述的态样关联于一种晶圆台。晶圆台包括用于容纳晶圆的区域。晶圆台进一步包括位于用于容纳晶圆的区域之外的第一感测器。晶圆台进一步包括位于用于容纳晶圆的区域外的第二感测器,其中第二感测器隔开第一感测器。晶圆台进一步包括位于用于容纳晶圆的区域外的第一粒子捕获区域,其中第一粒子捕获区域均隔开第一感测器及第二感测器,第一粒子捕获区域在平行于晶圆台的顶面的第一方向上的尺寸至少为26毫米(mm),第一粒子捕获区域在平行于晶圆台的顶面的第二方向上的尺寸至少为33毫米,并且第二方向垂直于第一方向。在一些实施例中,第一粒子捕获区域包括硅、氮氧化硅或光阻剂材料。在一些实施例中,晶圆台进一步包括位于用于容纳晶圆的区域外的第二粒子捕获区域,其中第二粒子捕获区域隔开第一粒子捕获区域、第一感测器及第二感测器。在一些实施例中,第二粒子捕获区域在第一方向上的尺寸至少为 33mm。在一些实施例中,第二粒子捕获区域在第二方向上的尺寸至少为26 mm。
本描述的态样关联于一种使用浸润式光刻系统的方法。方法包括通过在平行于晶圆台的顶面的平面中移动晶圆台以校准浸润罩。方法进一步包括移动晶圆台以将浸润罩放置于晶圆台的粒子捕获区域上。方法进一步包括移动晶圆台以在粒子捕获区域上定义二维选路轨迹。方法进一步包括在粒子捕获区域上定义了二维选路轨迹后,移动晶圆台以将浸润罩置于晶圆台上的晶圆上。在一些实施例中,移动晶圆台以定义二维选路轨迹包括在第一方向上移动晶圆台至少 26毫米(mm)的总距离。在一些实施例中,移动晶圆台以定义二维选路轨迹包括在第二方向上移动晶圆台至少33毫米的总距离,并且第二方向垂直于第一方向。在一些实施例中,移动晶圆台以定义二维选路轨迹包括定义具有L形、 U形或S形的二维选路轨迹。在一些实施例中,移动晶圆台以定义二维选路轨迹包括以约0.001毫米/秒至约1毫米/秒的速度移动晶圆台。在一些实施例中,方法进一步包括使用来自浸润罩的光束曝光晶圆,其中光束具有193纳米(nm) 的波长。
前述概述了几个实施例的特征,使得本领域具有通常知识者可以更好地理解本揭露的样态。本领域具有通常知识者应当理解,他们可以容易地将本揭露用作设计或修改其他过程与结构的基础,以实现与本文介绍的实施例相同的目的与/或实现相同的优点。本领域具有通常知识者还应该认识到,这样的等效构造不脱离本揭露的精神与范围,并且在不脱离本揭露的精神与范围的情况下,它们可以在这里进行各种改变,替换与变更。
- 浸润式光刻系统使用方法
- 浸润式光刻的方法及其处理系统