一种自动定位的高温计及自动定位方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及温度测量技术领域,更具体地说,它涉及一种自动定位的高温计及自动定位方法。
背景技术
在线材生产过程中,线材的温度是影响线材质量的一个重要因素。在生产过程中,线材会经过水冷降温工序,需要监控线材经过水冷降温后的温度,如果线材降温后的温度过高,则调整水冷降温工序,提高降温效率,确保降温效果。目前监控线材经过水冷降温后温度的方法一般是在水冷降温工序的后方设置温度检测装置,一般是温度传感器,检测线材的温度。但是现有的检测线材温度的方法存在以下问题:线材较细,温度传感器难以对中,检测的温度存在误差,严重时会影响线材产品质量;当由于生产工艺的原因导致线材走偏时,需要人为地重新校准温度传感器,使温度传感器对准线材;在生产过程中,线材速度很快,偶尔会出现“飞钢”的情况,容易撞击温度传感器,导致温度传感器歪斜,不能对准线材。可见,现有的针对线材的温度检测方法主要缺陷是无法确保温度传感器始终对准线材。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种自动定位的高温计及自动定位方法,实现温度传感器自动对准线材,确保温度检测的准确性。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种自动定位的高温计,包括驱动模块和温度检测模块,所述温度检测模块包括第一温度传感器和第二温度传感器;
所述驱动模块包括机座及设置在机座上的第一转动机构和第二转动机构,所述第一转动机构包括第一固定架、第一电机和第一转动杆,所述第一电机的输出轴穿过第一固定架与第一转动杆连接,所述第一温度传感器设置于第一转动杆的底面,所述第二转动机构包括第二固定架、第二电机和第二转动杆,所述第二电机的输出轴穿过第二固定架与第二转动杆连接,所述第二温度传感器设置于第二转动杆的底面;
所述第一固定架设置于机座上方,所述第二固定架通过连接架与第一固定架固定连接,所述第二转动杆朝向第一转动杆,且第二转动杆的一端与第一转动杆的一端可转动地连接。
在其中一个实施例中,所述第一转动杆远离第一电机的一端设置有对接槽,所述第二转动杆远离第二电机的一端嵌入对接槽内,所述对接槽内设置有与第二转动杆适配的轴承。
在其中一个实施例中,所述机座底部设置有双轴运动模块,所述双轴运动模块包括横向运动机构和纵向运动机构;
所述横向运动机构包括横向机架、横向连接座和横向电机,所述横向机架内设置有横向丝杆,所述横向电机设置于横向机架的一侧且与横向丝杆连接,所述横向连接座设置于横向机架上且与横向丝杆螺纹连接,所述机座设置于横向连接座的上方;
所述纵向运动机构包括纵向机架、纵向连接座和纵向电机,所述纵向机架内设置有纵向丝杆,所述纵向电机设置于纵向机架的一侧且与纵向丝杆连接,所述纵向连接座设置于纵向机架上且与纵向丝杆螺纹连接,所述横向机架设置于纵向连接座的上方。
在其中一个实施例中,所述机座还设置有竖向运动机构,所述竖向运动机构包括竖向电机和竖向连接座,所述机座内设置有竖向丝杆,所述竖向电机设置在机座顶端且与竖向丝杆连接,所述竖向连接座设置于机座侧面且与竖向丝杆螺纹连接,所述第一固定架与竖向连接座固定连接。
在其中一个实施例中,所述第一电机的输出轴设置有第一编码器,所述第二电机的输出轴设置有第二编码器。
在其中一个实施例中,所述驱动模块外设置有保护罩,所述保护罩覆盖第一转动机构和第二转动机构。
一种自动定位的高温计的自动定位方法,具体步骤如下:
在开始检测温度前,调整第一转动杆和第二转动杆,使第一温度传感器和第二温度传感器均处于朝向正下方的状态;
在检测线材温度时,第一电机处于待机状态,第一温度传感器保持朝下的状态不变,第二电机启动,驱使第二转动杆在一定范围内左右转动,第二温度传感器跟随第二转动杆的转动而左右移动;
在第二温度传感器左右移动的过程中,当第二温度传感器检测的温度高于第一温度传感器检测的温度时,第二电机停止,然后第一电机启动,根据第二转动杆的转动方向及转动角度,驱使第一转动杆往相同的转动方向转动相同的转动角度,第一温度传感器与第二温度传感器检测的方向重合;当第二温度传感器检测的温度始终小于或等于第一温度传感器检测的温度时,第二电机停止,第一电机保持待机的状态;
间隔一段时间后,第二电机再次启动,驱使第二转动杆再次左右转动,根据第二温度传感器的温度检测结果来调整第一温度传感器转动角度。
在其中一个实施例中,第二电机前后两次启动至少间隔10-20s。
在其中一个实施例中,以第一转动杆及第二转动杆的竖向平面为基准面,第二转动杆向左转动的范围是0-30°,第二转动杆向右转动的范围是0-30°。
在其中一个实施例中,当第二温度传感器检测的温度高于第一温度传感器检测的温度时,如果第二转动杆转动角度大于5°,说明线材已偏移,需要机座重新定位,第一电机和第二电机分别驱使第一温度传感器与第二温度传感器朝向正下方,然后第一电机和第二电机停止,横向电机和纵向电机启动,调整机座位置使第一温度传感器和第二温度传感器检测到的温度相同且最高,然后第二电机再次启动,驱使第二转动杆再次左右转动,根据第二温度传感器的温度检测结果来调整第一温度传感器转动角度;
如果第二转动杆转动角度小于或等于5°,则第二电机正常启动,驱使第二转动杆左右转动,根据第二温度传感器的温度检测结果来调整第一温度传感器转动角度。
综上所述,本发明具有以下有益效果:
本发明通过第一电机控制第一温度传感器的转动,通过第二电机控制第二温度传感器的转动,第一温度传感器的转动与第二温度传感器的转动互不影响,本发明以第一温度传感器检测到线材的温度为线材的实时温度,第二温度传感器左右移动,从不同角度检测线材的温度,且与第一温度传感器检测的温度进行比较,当第二温度传感器测得的温度大于第一温度传感器测得的温度时,说明第一温度传感器未对准线材,而测得最高温度的第二温度传感器的位置才是对准了线材,因此通过第一电机驱动第一转动杆旋转,使第一温度传感器也对准线材,从而实现温度传感器的自动定位,确保检测到的温度与线材实际的温度相同,有利于确保线材的生产质量。
附图说明
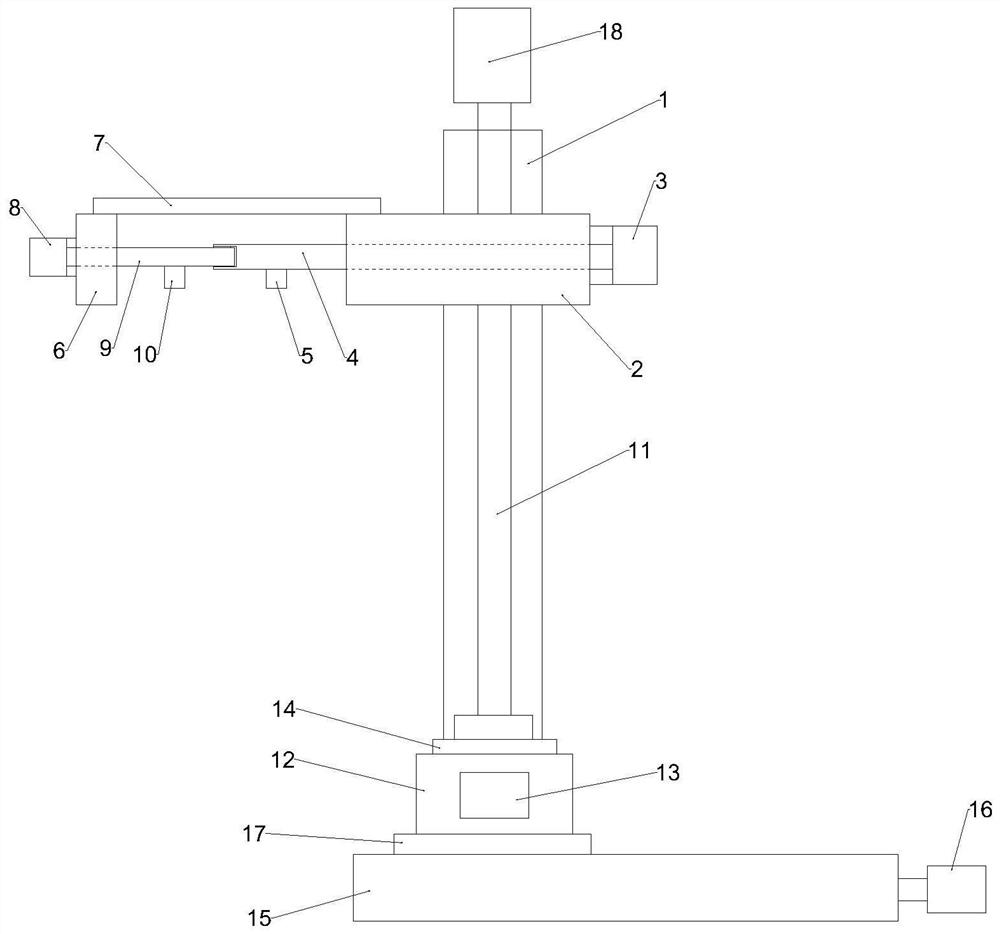
图1是本发明的整体示意图;
图2是本发明的第一转动杆转动范围示意图。
图中:1-机座,2-第一固定架,3-第一电机,4-第一转动杆,5-第一温度传感器,6-第二固定架,7-连接架,8-第二电机,9-第二转动杆,10-第二温度传感器,11-竖向丝杆,12-横向机架,13-横向电机,14-横向连接座,15-纵向机架,16-纵向电机,17-纵向连接座,18-竖向电机。
具体实施方式
下面结合附图和实施例,对本发明进行详细描述。
值得注意的是,本文所涉及的“上”“下”等方位词均相对于附图视角而定,仅仅只是为了便于描述,不能够理解为对技术方案的限制。
如图1所示,本发明提供了一种自动定位的高温计,包括驱动模块和温度检测模块,所述温度检测模块包括第一温度传感器5和第二温度传感器10;
驱动模块包括机座1及设置在机座1上的第一转动机构和第二转动机构,第一转动机构包括第一固定架2、第一电机3和第一转动杆4,第一电机3的输出轴穿过第一固定架2与第一转动杆4连接,第一温度传感器5设置于第一转动杆4的底面,第二转动机构包括第二固定架6、第二电机8和第二转动杆9,第二电机8的输出轴穿过第二固定架6与第二转动杆9连接,第二温度传感器10设置于第二转动杆9的底面;第一固定架2设置于机座1上方,第二固定架6通过连接架7与第一固定架2固定连接,第二转动杆9朝向第一转动杆4,且第二转动杆9的一端与第一转动杆4的一端可转动地连接。
其中,第一转动杆4远离第一电机3的一端设置有对接槽,第二转动杆9远离第二电机8的一端嵌入对接槽内,对接槽内设置有与第二转动杆9适配的轴承。
其中,第一电机3的输出轴设置有第一编码器,第二电机8的输出轴设置有第二编码器,用于记录第一转动杆4和第二转动杆9的转动方向及转动角度。
如附图所示,第一转动杆4与第二转动杆9同轴,且第一转动杆4的转动与第二转动杆9的转动互不影响。本发明的第一温度传感器5和第二温度传感器10均是现有常规的红外测温传感器,比如ENDURANCE创新型红外测温仪,测量温度与是否对准线材有关,当温度传感器未对准线材时,测得的温度低于线材实际温度。
本发明的工作原理是:当线材位于温度传感器的正下方时,温度传感器测得的温度应该是最高的,当线材位于温度传感器下方一侧时,温度传感器测得的温度比线材的实际温度要低,因此,当温度传感器不能对准线材时,温度传感器测得温度与实际温度相比存在误差,需要使温度传感器与线材对正。
在本发明中,第一温度传感器5是主要温度传感器,以第一温度传感器5检测到线材的温度为线材的实时温度,第二温度传感器10是校准温度传感器,第二转动杆9左右转动使得第二温度传感器10左右移动,从不同角度检测线材的温度,且与第一温度传感器5检测的温度进行比较,当第二温度传感器10测得的温度大于第一温度传感器5测得的温度时,说明第一温度传感器5未对准线材,而测得最高温度的第二温度传感器10的位置才是对准了线材,因此通过第一电机3驱动第一转动杆4旋转,使第一温度传感器5也对准线材。
进一步地,机座1底部设置有双轴运动模块,双轴运动模块包括横向运动机构和纵向运动机构;
横向运动机构包括横向机架12、横向连接座14和横向电机13,横向机架12内设置有横向丝杆,横向电机13设置于横向机架12的一侧且与横向丝杆连接,横向连接座14设置于横向机架12上且与横向丝杆螺纹连接,机座1设置于横向连接座14的上方;
纵向运动机构包括纵向机架15、纵向连接座17和纵向电机16,纵向机架15内设置有纵向丝杆,纵向电机16设置于纵向机架15的一侧且与纵向丝杆连接,纵向连接座17设置于纵向机架15上且与纵向丝杆螺纹连接,横向机架12设置于纵向连接座17的上方。
可以理解的是,由于生产工艺的原因导致线材走偏时,此时第一温度传感器5与线材之间的偏差过大,第一温度传感器5测得温度存在误差,通过第二温度传感器10会测得更高的温度,但是即使第一温度传感器5转动至第二温度传感器10测得最高温度的位置,由于第一温度传感器5与线材之间的距离过大,如果线材进一步走偏,将第一温度传感器5将难以转动至合适的位置,因此需要通过横向运动机构和纵向运动机构来调整机座1的位置,使第一温度传感器5处于线材的正上方。
进一步地,机座1还设置有竖向运动机构,竖向运动机构包括竖向电机18和竖向连接座,机座1内设置有竖向丝杆11,竖向电机18设置在机座1顶端且与竖向丝杆11连接,竖向连接座设置于机座1侧面且与竖向丝杆11螺纹连接,第一固定架2与竖向连接座固定连接。竖向运动机构主要的作用是调整第一温度传感器5和第二温度传感器10的高度。
在本发明中,驱动模块外设置有保护罩,保护罩覆盖第一转动机构和第二转动机构。
本发明了也提供了一种自动定位的高温计的自动定位方法,具体步骤如下:
在开始检测温度前,调整第一转动杆4和第二转动杆9,使第一温度传感器5和第二温度传感器10均处于朝向正下方的状态;
在检测线材温度时,第一电机3处于待机状态,第一温度传感器5保持朝下的状态不变,第二电机8启动,驱使第二转动杆9在一定范围内左右转动,第二温度传感器10跟随第二转动杆9的转动而左右移动;
在第二温度传感器10左右移动的过程中,当第二温度传感器10检测的温度高于第一温度传感器5检测的温度时,第二电机8停止,然后第一电机3启动,根据第二转动杆9的转动方向及转动角度,驱使第一转动杆4往相同的转动方向转动相同的转动角度,第一温度传感器5与第二温度传感器10检测的方向重合;当第二温度传感器10检测的温度始终小于或等于第一温度传感器5检测的温度时,第二电机8停止,第一电机3保持待机的状态;
间隔一段时间后,第二电机8再次启动,驱使第二转动杆9再次左右转动,根据第二温度传感器10的温度检测结果来调整第一温度传感器5转动角度。
进一步地,第二电机8前后两次启动至少间隔10-20s。
进一步地,如图2所示,以第一转动杆4及第二转动杆9的竖向平面为基准面,第二转动杆9向左转动的范围是0-30°,第二转动杆9向右转动的范围是0-30°。
进一步地,如图2所示,当第二温度传感器10检测的温度高于第一温度传感器5检测的温度时,如果第二转动杆9转动角度大于5°,说明线材已偏移,需要机座1重新定位,第一电机3和第二电机8分别驱使第一温度传感器5与第二温度传感器10朝向正下方,然后第一电机3和第二电机8停止,横向电机13和纵向电机16启动,调整机座1位置使第一温度传感器5和第二温度传感器10检测到的温度相同且最高,然后第二电机8再次启动,驱使第二转动杆9再次左右转动,根据第二温度传感器10的温度检测结果来调整第一温度传感器5转动角度;
如果第二转动杆9转动角度小于或等于5°,则第二电机8正常启动,驱使第二转动杆9左右转动,根据第二温度传感器10的温度检测结果来调整第一温度传感器5转动角度。
本发明涉及的第一温度传感器5、第二温度传感器10及多个电机均与控制器电连接,由控制器控制,其中,控制器可以是现有常规的PLC控制器,比如西门子S7-400可编程逻辑控制器。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种自动定位的高温计及自动定位方法
- 自动定位装置、自动定位系统和自动定位方法