断路器主轴的连接臂角度测量装置、方法和系统
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及断路器领域,尤其涉及一种断路器主轴的连接臂角度测量装置、方法和系统。
背景技术
断路器是开关柜里重要的电力设备,用于切断和接通负荷电路,以及切断故障电路。断路器的尺寸从低电压应用(几十安培数)到高电压应用(成千上万安培数)。
其中,轴是对断路器来说控制动静触头运动的重要元件。断路器的主轴和其他元件被连接臂连接在一起。在一个断路器的轴上包括许多连接臂,每个连接臂具有一个连接孔。所有断路器的连接臂的相关角度都是固定的,如果一个连接臂以一个错误的角度配置,那么轴就不能够顺利安装在断路器中。因此,怎样方便容易精确快速地在生产轴以后检测断路器连接臂的角度非常重要。
现在,上述问题并未解决。通常,在断路器的轴生产好以后,会依次人工利用游标卡尺测量一个断路器轴上所有连接臂的角度,而人工测量每个轴的所有连接臂大该需要两个小时左右。
因此,业内需要一种简单快速精确测试断路器主轴的连接臂角度的机制。
发明内容
本发明第一方面提供了断路器主轴的连接臂角度测量装置,其中,所述断路器主轴的连接臂角度测量装置包括:一个旋转轴,其可旋转地设置于信号处理装置上;一个旋转件,其连接于所述旋转轴并随着该旋转轴的旋转而旋转;一个连接于所述旋转件的可伸缩连杆,其沿着其延伸方向可伸缩,所述可伸缩连杆的一端具有一个开口,其中,所述开口的一侧固定有一个测距传感器的发射端,所述一侧相对的另一侧固定有一个对应于所述测距传感器的发射端的接收端,其中所述发射端和接收端记录所述旋转件和可伸缩连杆的移动;一个信号处理装置,其记录所述旋转轴、可伸缩连杆、发射端和接收端的移动角度以及发射端和接收端的电压值及其时间。
进一步地,所述断路器的主轴上套设有多个连接臂,所述多个连接臂和所述主轴的角度不同,其中,所述连接臂上分别具有至少一个连接孔。
进一步地,所述测距传感器为光电传感器。
进一步地,所述光电传感器为激光传感器。
本发明第二方面提供了断路器主轴的连接臂角度测量方法,所述断路器主轴的连接臂角度测量方法利用了本发明第一方面所述的断路器主轴的连接臂角度测量装置,其中,包括如下步骤:将所述待测断路器主轴的连接臂和所述断路器主轴的连接臂角度测量装置相对放置,使得所述连接臂和所述开口相互平行;以所述旋转轴为轴旋转所述旋转件以带动所述可伸缩连杆及其开口,使得所述开口上的所述发射端和所述接收端横扫过待测连接孔,当所述发射端或所述接收端横扫过所述连接孔时不导通则电压值为0,当所述发射端和所述接收端横扫过所述连接臂时则电压值不为0;基于上述电压值及其对应时间计算每个所述连接臂和断路器主轴的角度。
进一步地,断路器主轴的连接臂角度测量方法还包括如下步骤:对所述光电传感器施加脉冲信号,并对所述光电传感器信号解码,统计所述电压值及其对应时间。
进一步地,断路器主轴的连接臂角度测量方法还包括如下步骤:选取所述断路器主轴其中一个横切面的第一中心点,其中,所述第一中心点到所述旋转件的第二中心点的距离为m,则所述连接臂和断路器主轴的角度为:
其中,h为所述连接孔的第三中心点到所述距离m的垂直线,h=nsinθ
本发明第三方面提供了断路器主轴的连接臂角度测量系统,所述断路器主轴的连接臂角度测量方法利用了本发明第一方面所述的断路器主轴的连接臂角度测量装置,其中,所述断路器主轴的连接臂角度测量系统包括:放置装置,其将所述待测断路器主轴的连接臂和所述断路器主轴的连接臂角度测量装置相对放置,使得所述连接臂和所述开口相互平行;旋转装置,其以所述旋转轴为轴旋转所述旋转件以带动所述可伸缩连杆及其开口,使得所述开口上的所述发射端和所述接收端横扫过待测连接孔,当所述发射端或所述接收端横扫过所述连接孔时不导通则电压值为0,当所述发射端和所述接收端横扫过所述连接臂时则电压值不为0;计算装置,其基于上述电压值及其对应时间计算每个所述连接臂和断路器主轴的角度。
进一步地,其还包括:处理装置,其对所述光电传感器施加脉冲信号,并对所述光电传感器信号解码,统计所述电压值及其对应时间。
断路器主轴的连接臂角度测量方法,其还包括:选区装置,其选取所述断路器主轴其中一个横切面的第一中心点,其中,所述第一中心点到所述旋转件的第二中心点的距离为m,则所述连接臂和断路器主轴的角度为:
其中,h为所述连接孔的第三中心点到所述距离m的垂直线,h=nsinθ
本发明能够极大改进断路器主轴的连接臂角度测量机制的效率,并实现智能测试和设计。此外,本发明弥补了断路器主要器件的缺陷,本发明特别适用于在中高压断路器产品。
附图说明
图1是断路器主轴及其连接臂的结构示意图;
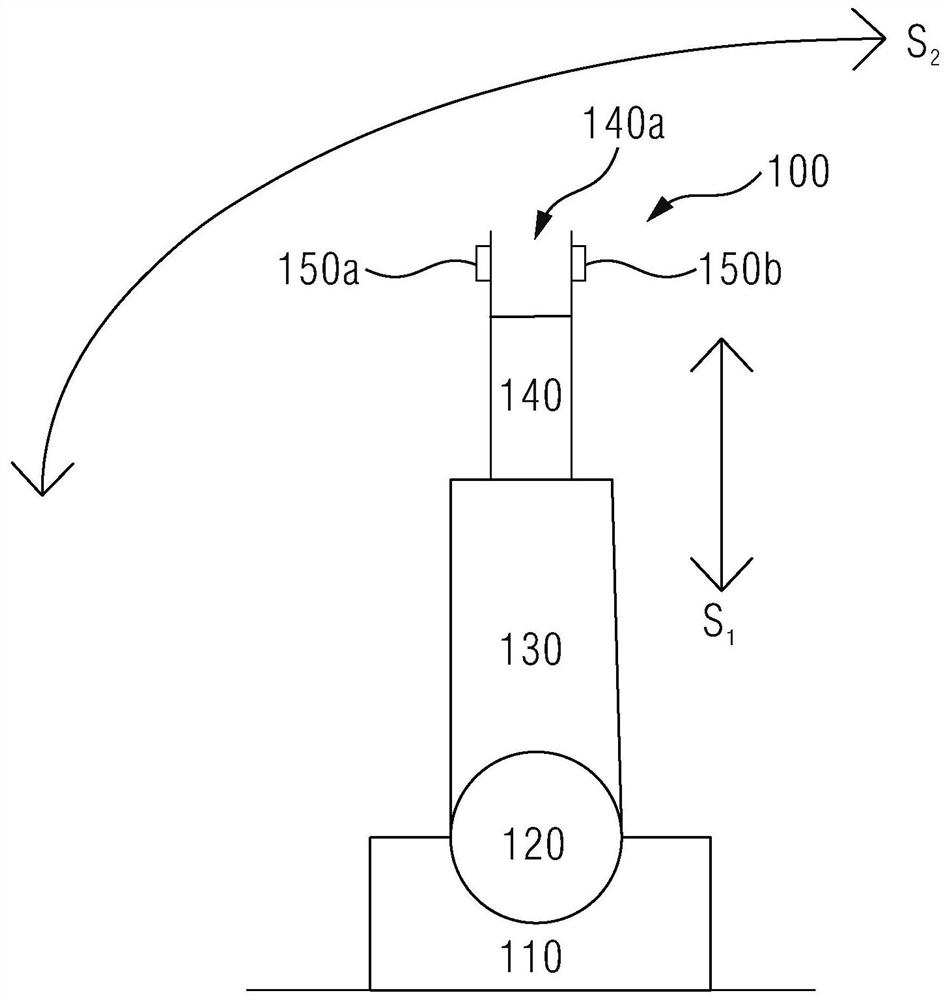
图2是根据本发明一个具体实施例的断路器主轴及其连接臂角度测量装置的结构示意图;
图3是根据本发明一个具体实施例的断路器主轴及其连接臂角度测量装置的位置示意图;
图4是根据本发明一个具体实施例的断路器主轴及其连接臂角度测量装置的测距传感器的发射端和接收端的对应电压图;
图5是根据本发明一个具体实施例的断路器主轴及其连接臂角度测量装置的角度计算示意图。
具体实施方式
以下结合附图,对本发明的具体实施方式进行说明。
本发明提供断路器主轴的连接臂角度测量机制,其中,本发明更加精确、方便和造价低。
图1是断路器主轴及其连接臂的结构示意图。如图1所示,断路器的主轴200是断路器的重要部件,其上套设有多个连接臂,分别为连接臂210、连接臂220、连接臂230、连接臂240、连接臂250、连接臂260、连接臂270、连接臂280、连接臂290。其中,上述连接臂210、连接臂220、连接臂230、连接臂240、连接臂250、连接臂260、连接臂270、连接臂280、连接臂290和所述主轴200之间的角度不同。其中,所述连接臂上分别具有至少一个连接孔。具体地,连接臂210上具有连接孔210a,连接臂220上具有连接孔220a和220b,连接臂230上具有连接孔230a,连接臂250上具有连接孔250a、250b和250c,连接臂260上具有连接孔260a,连接臂270上具有连接孔270a,连接臂280上具有连接孔280a,连接臂290上具有连接孔290a。
本发明第一方面提供了断路器主轴的连接臂角度测量装置。图2是根据本发明一个具体实施例的断路器主轴及其连接臂角度测量装置的结构示意图,所述断路器主轴的连接臂角度测量装置100包括一个信号处理装置110、一个旋转轴120、一个旋转件130和可伸缩连杆140。具体地,旋转轴120其可旋转地设置于所述信号处理装置110上。旋转件130连接于所述旋转轴120并随着该旋转轴120的旋转而旋转。可伸缩连杆140连接于所述旋转件130,所述可伸缩连杆140沿着其延伸方向可伸缩,即延伸方向如3所示的箭头S
进一步地,所述测距传感器为光电传感器。优选地,所述光电传感器为激光传感器。
本发明第二方面提供了断路器主轴的连接臂角度测量方法,其利用本发明第一方面所述断路器主轴的连接臂角度测量方法利用了本发明第一方面所述的断路器主轴的连接臂角度测量装置。示例性地,下面以测试连接臂210和主轴200的角度为例对上述方法进行说明。
首先执行步骤S1,将所述待测断路器主轴200的连接臂210和所述断路器主轴的连接臂角度测量装置100相对放置,使得该待测连接臂210和所述开口140a相互平行。图3是根据本发明一个具体实施例的断路器主轴及其连接臂角度测量装置的位置示意图,如图3所示,待测主轴200放置在一个台面A上,断路器主轴的连接臂角度测量装置100放置在一个平台B上。优选地,所述待测主轴200的连接臂和所述断路器主轴的连接臂角度测量装置100相对平行放置。其中,所述断路器主轴的连接臂角度测量装置100能够沿着箭头S
优选地,每次测试一个连接臂和主轴的角度,例如,在本实施例中,依次图1所示的连接臂210、连接臂220、连接臂230、连接臂240、连接臂250、连接臂260、连接臂270、连接臂280和连接臂290分别与主轴200的角度。
然后执行步骤S2,以所述旋转轴120为轴旋转所述旋转件130以带动所述可伸缩连杆140及其开口140a,使得所述开口140a上的所述发射端150a和所述接收端150b横扫过待测连接孔,当所述发射端150a或所述接收端150b横扫过该连接孔时不导通则电压值为0,当所述发射端150a和所述接收端150b横扫过所述连接臂210时则电压值不为0。
具体地,如图4所示,其横坐标为时间,竖坐标为电压。在时间t1到t2范围内,所述发射端150a和所述接收端150b第一次横扫过该连接臂210的金属部分时,电压V=V1。然后,在时间t2到t3范围内,当测距传感器的所述发射端150a或所述接收端150b连接孔210a时不导通,则电压V=0。接着,在时间t3到t4范围内,所述发射端150a和所述接收端150b第二次横扫过该连接臂210的金属部分时,电压V=V1。
最后执行步骤S3,基于上述电压值及其对应时间计算每个所述连接臂210、和断路器主轴200的角度。
优选地,断路器主轴的连接臂角度测量方法还包括如下步骤:对所述光电传感器施加脉冲信号,并对所述光电传感器信号解码,统计所述电压值及其对应时间。
图5是根据本发明一个具体实施例的断路器主轴及其连接臂角度测量装置的角度计算示意图。断路器主轴的连接臂角度测量方法还包括如下步骤:选取所述断路器主轴(200)其中一个横切面的第一中心点O
其中,h为所述连接孔(210a、220a、220b、230a、250a、250b、250c、260a、270a、280a、290a)的第三中心点O
本发明第三方面提供了断路器主轴的连接臂角度测量系统,所述断路器主轴的连接臂角度测量方法利用了本发明第一方面所述的断路器主轴的连接臂角度测量装置,其中,所述断路器主轴的连接臂角度测量系统包括:放置装置,其将所述待测断路器主轴的连接臂和所述断路器主轴的连接臂角度测量装置相对放置,使得所述连接臂和所述开口相互平行;旋转装置,其以所述旋转轴为轴旋转所述旋转件以带动所述可伸缩连杆及其开口,使得所述开口上的所述发射端和所述接收端横扫过待测连接孔,当所述发射端或所述接收端横扫过所述连接孔时不导通则电压值为0,当所述发射端和所述接收端横扫过所述连接臂时则电压值不为0;计算装置,其基于上述电压值及其对应时间计算每个所述连接臂和断路器主轴的角度。
进一步地,其还包括:处理装置,其对所述光电传感器施加脉冲信号,并对所述光电传感器信号解码,统计所述电压值及其对应时间。
本发明第三方面断路器主轴的连接臂角度测量系统,其还包括:选区装置,其选取所述断路器主轴其中一个横切面的第一中心点,其中,所述第一中心点到所述旋转件的第二中心点的距离为m,则所述连接臂和断路器主轴的角度为:
其中,h为所述连接孔的第三中心点到所述距离m的垂直线,h=nsinθ
本发明能够极大改进断路器主轴的连接臂角度测量机制的效率,并实现智能测试和设计。此外,本发明弥补了断路器主要器件的缺陷,本发明特别适用于在中高压断路器产品。
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。此外,不应将权利要求中的任何附图标记视为限制所涉及的权利要求;“包括”一词不排除其它权利要求或说明书中未列出的装置或步骤;“第一”、“第二”等词语仅用来表示名称,而并不表示任何特定的顺序。
- 断路器主轴的连接臂角度测量装置、方法和系统
- 高压真空断路器的拐臂与主轴连接结构改良