一种用于旋转机构的零位传感器
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及一种用于旋转机构的零位传感器,用于被检测转动件与不动件间有较大相对平动和摆动情况下的零位。
背景技术
磁悬浮旋转扫描拼接成像的遥感卫星可实现超幅宽高分成像。磁悬浮旋转关节实现平台舱与载荷舱连接,为相机提供高精密支撑和转动控制,通过检测旋转关节的零点位置,为相机光轴提供高精度指向测量。零位传感器用于提供载荷舱与平台舱达到0度转角时的信息,当载荷舱与平台舱处于0度转角时,发送达到0度的时间信息(星时)给控制分系统,要求0度位置测量误差不大于9”,需要在关节内设定高精度的零位传感器。
目前常用于检测无接触多圈旋转的位置检测器有旋转变压器、磁编码器、光电编码器。旋转变压器结构牢固、具有很强的环境适应能力和抗震能力,并且能直接给出转子的零点位置信号,且精度能满足一般的检测要求,但在悬浮关节工作时,大间隙的定、转子相对位置变化会引起旋变位置解调精度的降低,难以满足高精度的指向要求。常用的磁编码器为霍尔传感器,霍尔传感器可分为线性霍尔传感器和开关霍尔传感器,定、转子间相对位移引起的磁场强度的变化会对线性霍尔传感器精度带来较大的误差,且其误差难以补偿;开关式霍尔传感器的精度较低不能满足要求。光电编码器具有很高的精度,从几百线/周到几万线/周,而且在低速运行情况下仍然有很高的分辨率,但在有定、转子间有相对位移的情况下,光电编码器不仅难以满足解调精度,而且极有可能接收不到正常的光电信号,且玻璃质地的光电码盘的适应环境能力差,可靠性不高,在冲击和震动下容易损坏。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提出一种用于旋转机构的零位传感器,补偿旋转部件相对于转轴在各个方向产生平动时带来的误差,并能防止传感器在运动中受损。
本发明解决技术的方案是:
一种用于旋转机构的零位传感器,包括零位传感器转子检测盘和零位传感器定子组件,零位传感器转子检测盘装在产品的转动件上与转动件同轴转动,零位传感器定子组件装在产品的不动件上,与不动件同轴安装;
零位传感器定子组件包括零位传感器定子安装支架、+X位光电组件定子部件、+Y位光电组件定子部件、-X位光电组件定子部件和-Y位光电组件定子部件,将+X位光电组件定子部件、+Y位光电组件定子部件、-X位光电组件定子部件、-Y位光电组件定子部件依次按逆时针方向固定在零位传感器定子安装支架上,每个部件间隔90度机械角;
+X位光电组件定子部件、+Y位光电组件定子部件、-X位光电组件定子部件和-Y位光电组件定子部件均包括光敏组件、发光组件、发光挡板和光电组件支架,将光敏组件装在光电组件支架上梁臂上端面处,使其光敏敏感方向朝向下臂梁;将发光组件装在光电组件支架下臂梁下端面处,使其发光方向朝向上臂梁;将发光挡板装在光电组件支架的下臂梁上端;光敏组件、发光组件、发光挡板的安装位置靠近光电组件支架根部;发光组件发出的光垂直到对应的光敏组件上,形成一条光路,发光挡板上开有长方形的通光狭缝,作为静光栏;转子检测盘上的四个通光孔为动光栏狭缝式设计。
进一步的,零位传感器转子检测盘的4个通光孔和+X位、+Y位、-X位、-Y位的4组光电组件定子部件布置在不同直径下,且将转子检测盘开的通光孔与定子传感器位置相同,保证不同光路的同时输出以及传感器之间不出现光路重叠。
进一步的,零位传感器的光路采用平面正交位置的4点分布,以补偿旋转部件转轴平动给零位传感器带来的误差。
进一步的,通过1mm×3mm通光孔的静光栏狭缝和动光栏狭缝式设计以及发光组件和光敏组件的相对间距的设计,在确保旋转部件产生平动时,光路信号不丢失的同时,将光电输出信号处理为梯形波形或三角波。
进一步的,传感器分布在平面正交的4点位置处,计算同时输出在时间轴上重合的4个梯形信号或是三角信号双边斜率,拟合出输出信号的时间中点;当旋转中心在机械零位中心时,4路输出信号的中点重合,当旋转中心偏移时,4路输出信号的中点不再重合,会发生不同的偏移量,利用4组信号中点的偏移量补偿零位的误差,以提供高精度的零位传感器。
进一步的,将零位传感器转子检测盘和零位传感器定子安装支架分别装卡在产品的转动件和固定件上,再将+X位光电组件定子部件、+Y位光电组件定子部件、-X位光电组件定子部件、-Y位光电组件定子部件依次安装在零位传感器定子安装支架上,使零位传感器转子检测盘在这四个部件的上、下臂梁间。
进一步的,调节这四个部件在零位传感器定子安装支架上位置,使零位传感器转子检测盘旋转至其上的四个通光孔达到+X位光电组件定子部件、+Y位光电组件定子部件、-X位光电组件定子部件、-Y位光电组件定子部件这四个部件的光路处时,能够同时输出光电信号,并保证其输出光电信号的最大波峰点重合。
进一步的,工作中,当旋转件转动时,每转一圈零位传感器只输出一次光电信号,这一次的光电信号含有四路信号;实际应用中,每次输出的四路信号的波峰值不完全重合,记录其每个波峰值间的时间差值,在后续的系统中加以补偿。
进一步的,发光组件端面到光敏组件的端面在轴向方向的距离为5-10mm。
进一步的,发光挡板上开有1mm×3mm长方形的通光狭缝。
本发明与现有技术相比的有益效果是:
(1)本发明设计的旋转动光栏采用金属薄盘,可以避免旋转部件发生碰撞时产生的损坏;
(2)本发明设计的转子检测盘上刻的通光孔的数量小,尺寸精度要求低,易于加工,成品低;
(3)本发明设计的转子检测盘的4个通光孔和4组传感器定子布置在不同直径下,且将转子检测盘的开的通光孔与定子传感器位置相同,这种结构的设计不仅保证了不同光路的同时输出,同时也保证了传感器之间不会出现光路重叠;
(4)本发明设计的零位传感器的通光路采用平面正交位置的4点分布,以补偿旋转部件转轴平动给零位传感器带来的误差;
(5)本发明设计中1mm×3mm通光孔的静光栏狭缝和动光栏狭缝式设计,以及发光组件和光敏组件的相对间距的设计,在确保旋转部件产生平动时,光路信号不丢失的同时,尽可能地将光电输出信号处理为近似梯形波形;
(6)本发明设计的传感器分布在平面正交的4点位置处,计算同时输出(在时间轴上重合)的4个近梯形信号(或是近三角信号)双边斜率的计算,拟合出输出信号的时间中点,当旋转中心在机械零位中心时,4路输出信号的中点重合,当旋转中心偏移时,4路输出信号的中点不再重合,会发生不同的偏移量,利用4组信号中点的偏移量可以补偿零位的误差,以提供高精度的零位传感器。
附图说明
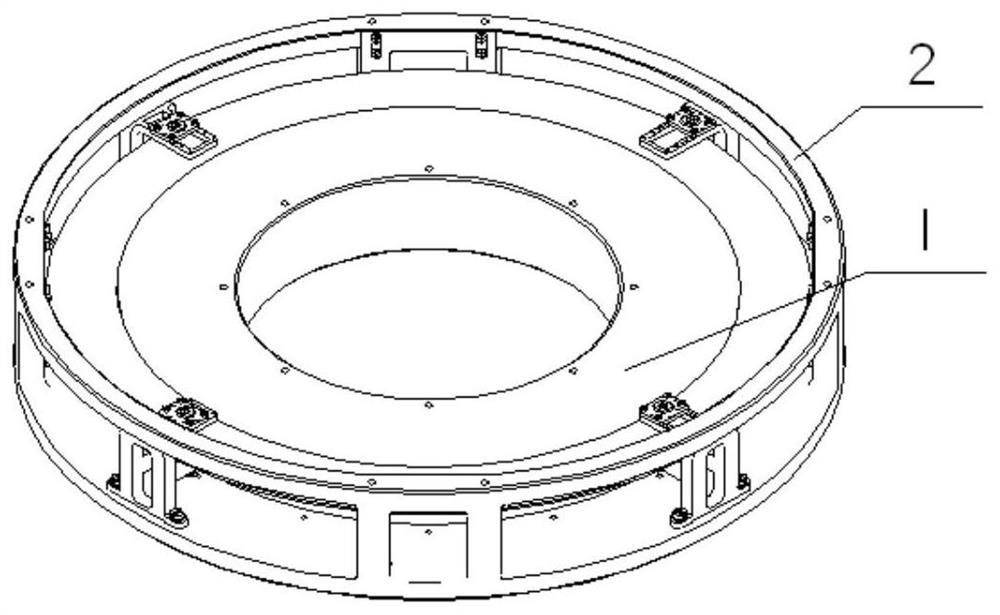
图1为本发明的组件总示图;
图2为本发明旋转动光栏的示意图和剖示图;
图3为本发明零位传感器定子组件示意图;
图4为本发明零位传感器定子安装支架的示意图
图5-8为本发明光电组件定子部件的示意图;
图9为本发明光敏组件的示意图;
图10为本发明发光组件的示意图;
图11为本发明发光挡板的示意图;
图12为本发明光电组件支架的示意图;
图13零位传感器工作示意图。
具体实施方式
下面结合实施例对本发明作进一步阐述。
如图1-13所示,如图1所示,一种用于旋转机构的零位传感器组件由零位传感器转子检测盘1和零位传感器定子组件2组成。零位传感器转子检测盘1装在产品的转动件上与转动件同轴转动,零位传感器定子组件装在产品的不动件上,与不动件同轴安装。
如图3所示,零位传感器定子组件2由零位传感器定子安装支架3、+X位光电组件定子部件4、+Y位光电组件定子部件5、-X位光电组件定子部件6、-Y位光电组件定子部件7四个部件组成。将+X位光电组件定子部件4、+Y位光电组件定子部件5、-X位光电组件定子部件6、-Y位光电组件定子部件7四个部件依次按逆时针方向,通过螺钉固定在零位传感器定子安装支架3上。
如图5所示,+X位光电组件定子部件4由光敏组件8、发光组件9、发光挡板10、光电组件支架11组成。将光敏组件8装在光电组件支架11上梁臂上端面处,使其光敏敏感方向朝向下下臂梁;将发光组件9装在光电组件支架11下臂梁下端面处,使其发光方向朝向上臂梁;将发光挡板10装在光电组件支架11的下臂梁上端。光敏组件8、发光组件9、发光挡板10的安装位置均为靠近光电组件支架11根部处的第一和第三个螺钉孔位处,并用螺钉紧固。
如图6所示,+Y位光电组件定子部件4由光敏组件8、发光组件9、发光挡板10、光电组件支架11组成。将光敏组件8装在光电组件支架11上梁臂上端面处,使其光敏敏感方向朝向下下臂梁;将发光组件9装在光电组件支架11下臂梁下端面处,使其发光方向朝向上臂梁;将发光挡板10装在光电组件支架11的下臂梁上端。光敏组件8、发光组件9、发光挡板10的安装位置均为靠近光电组件支架11根部处的第二和第五个螺钉孔位处,并用螺钉紧固。
如图7所示,-X位光电组件定子部件4由光敏组件8、发光组件9、发光挡板10、光电组件支架11组成。将光敏组件8装在光电组件支架11上梁臂上端面处,使其光敏敏感方向朝向下下臂梁;将发光组件9装在光电组件支架11下臂梁下端面处,使其发光方向朝向上臂梁;将发光挡板10装在光电组件支架11的下臂梁上端。光敏组件8、发光组件9、发光挡板10的安装位置均为靠近光电组件支架11根部处的第四和第七个螺钉孔位处,并用螺钉紧固。
如图8所示,-Y位光电组件定子部件4由光敏组件8、发光组件9、发光挡板10、光电组件支架11组成。将光敏组件8装在光电组件支架11上梁臂上端面处,使其光敏敏感方向朝向下下臂梁;将发光组件9装在光电组件支架11下臂梁下端面处,使其发光方向朝向上臂梁;将发光挡板10装在光电组件支架11的下臂梁上端。光敏组件8、发光组件9、发光挡板10的安装位置均为靠近光电组件支架11根部处的第六和第八个螺钉孔位处,并用螺钉紧固。
如图13所示,先将零位传感器转子检测盘1和零位传感器定子安装支架3分别装卡在产品的转动件13和固定件12上。再将+X位光电组件定子部件4、+Y位光电组件定子部件5、-X位光电组件定子部件6、-Y位光电组件定子部件7依次安装在零位传感器定子安装支架3上,使零位传感器转子检测盘1在这四个部件的上、下臂梁间。调节这四个部件在零位传感器定子安装支架3上位置,使零位传感器转子检测盘1旋转至其上的四个通光孔达到+X位光电组件定子部件4、+Y位光电组件定子部件5、-X位光电组件定子部件6、-Y位光电组件定子部件7这四个部件的光路处时,能够同时输出光电信号,并保证其输出光电信号的最大波峰点重合。工作中,当旋转件转动时,每转一圈零位传感器只输出一次光电信号,这一次的光电信号含有四路信号。实际应用中,每次输出的四路信号的波峰值不可能完全重合,需要记录其每个波峰值间的时间差值,在后续的系统中加以补偿。
每个部件间隔90度机械角,发光组件9端面到光敏组件8的端面在轴向方向的距离为5-10mm,发光挡板10上开有1mm×3mm长方形的通光狭缝。
+X位光电组件定子部件4、+Y位光电组件定子部件5、-X位光电组件定子部件6和-Y位光电组件定子部件7均包括光敏组件8、发光组件9、发光挡板10和光电组件支架11,将光敏组件8装在光电组件支架11上梁臂上端面处,使其光敏敏感方向朝向下臂梁;将发光组件9装在光电组件支架11下臂梁下端面处,使其发光方向朝向上臂梁;将发光挡板10装在光电组件支架11的下臂梁上端;光敏组件8、发光组件9、发光挡板10的安装位置靠近光电组件支架11根部;发光组件9发出的光垂直到对应的光敏组件上,形成一条光路,发光挡板10上开有长方形的通光狭缝,作为静光栏;转子检测盘1上的四个通光孔为动光栏狭缝式设计。
零位传感器转子检测盘的4个通光孔和+X位、+Y位、-X位、-Y位的4组光电组件定子部件布置在不同直径下,且将旋转光栏的开的通光孔与定子传感器位置相同,保证不同光路的同时输出以及传感器之间不出现光路重叠。
零位传感器的光路采用平面正交位置的4点分布,以补偿旋转部件转轴平动给零位传感器带来的误差。
通过1mm×3mm通光孔的静光栏狭缝和动光栏狭缝式设计以及发光组件和光敏组件的相对间距的设计,在确保旋转部件产生平动时,光路信号不丢失的同时,将光电输出信号处理为梯形波形或三角波。
传感器分布在平面正交的4点位置处,计算同时输出在时间轴上重合的4个梯形信号或是三角信号双边斜率,拟合出输出信号的时间中点;当旋转中心在机械零位中心时,4路输出信号的中点重合,当旋转中心偏移时,4路输出信号的中点不再重合,会发生不同的偏移量,利用4组信号中点的偏移量补偿零位的误差,以提供高精度的零位传感器。
将零位传感器转子检测盘1和零位传感器定子安装支架3分别装卡在产品的转动件13和固定件12上,再将+X位光电组件定子部件4、+Y位光电组件定子部件5、-X位光电组件定子部件6、-Y位光电组件定子部件7依次安装在零位传感器定子安装支架3上,使零位传感器转子检测盘1在这四个部件的上、下臂梁间。
调节这四个部件在零位传感器定子安装支架3上位置,使零位传感器转子检测盘1旋转至其上的四个通光孔达到+X位光电组件定子部件4、+Y位光电组件定子部件5、-X位光电组件定子部件6、-Y位光电组件定子部件7这四个部件的光路处时,能够同时输出光电信号,并保证其输出光电信号的最大波峰点重合。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
- 一种用于旋转机构的零位传感器
- 一种用于光刻机的零位传感器定位装置及方法