一种水面漂浮物无人收集船
文献发布时间:2023-06-19 13:27:45
技术领域
本发明属于水面漂浮物收集领域,尤其涉及一种水面漂浮物无人收集船。
背景技术
随着社会的发展,大水域以及河道等的漂浮物越来越多,水源污染日益严重,环境问题也越来越引起了各个国家的高度重视。
传统的水面漂浮物的收集一般采用人工打捞的方式,即人工捕捞漂浮物后装载于收集船上,打捞工作强度高、效率低且成本高,难以满足需求。
因此亟需一种水面漂浮物无人收集船以解决上述问题。
发明内容
本发明实施例的目的在于提供一种水面漂浮物无人收集船,旨在解决背景技术中存在的问题。
本发明实施例是这样实现的,一种水面漂浮物无人收集船,包括:
船体,所述船体内设有用于储存水的储蓄室和用于储存漂浮物的储料室;
浮体,所述浮体与所述船体活动连接,所述浮体用于启闭储料室;
驱动组件,所述驱动组件与所述船体连接,所述驱动组件连接有活塞组件,所述活塞组件连接有清理组件,所述驱动组件用于驱动活塞组件往复直线移动,所述活塞组件通过往复直线移动将储蓄室中的水送至清理组件,以及驱动清理组件往复摆动,所述清理组件用于喷洒水进而将浮体上漂浮物冲入储料室。
作为本发明进一步的方案,所述活塞组件包括活塞缸、活塞件和弹性件,所述活塞缸与所述船体连接,所述活塞缸与所述储蓄室连通,所述活塞缸与所述活塞件活动连接,所述活塞件和活塞缸之间设有用于活塞件复位的弹性件,所述活塞件与所述驱动组件连接。
作为本发明进一步的方案,所述活塞件包括移动板、活塞杆、活塞和齿条,所述活塞与所述活塞缸活动连接,所述活塞与所述活塞杆固定连接,所述活塞杆上套设有弹性件,所述活塞杆与所述移动板固定连接,所述移动板一侧抵触驱动组件,所述移动板与所述齿条固定连接,所述齿条与所述清理组件活动连接。
作为本发明进一步的方案,所述驱动组件包括转轴和凸轮,所述转轴固定连接有电机的输出轴,所述转轴与所述凸轮固定连接,所述凸轮抵触活塞组件。
作为本发明进一步的方案,所述清理组件包括摆动件和喷洒件,所述摆动件一端与所述活塞组件活动连接,另一端与所述喷洒件连接,所述喷洒件与所述活塞组件连通,所述喷洒件用于冲洗浮体,所述活塞组件驱动摆动件往复摆动进而带动喷洒件往复摆动。
作为本发明进一步的方案,所述摆动件包括残齿轮和摆动杆,所述残齿轮与所述船体转动连接,所述残齿轮与所述活塞组件啮合,所述残齿轮与所述摆动杆固定连接,所述摆动杆与所述喷洒件固定连接。
作为本发明进一步的方案,所述船体位于储蓄室处设有控制阀,所述船体位于储料室处连接有第二滤网,所述船体连接有第一滤网。
打开控制阀,水进入储蓄室使得船体下沉至预设位置,关闭控制阀,漂浮物通过收集组件进入船体内,并且在第一滤网的作用下留存于浮体上方,驱动组件驱动活塞组件将储蓄室中的水送至清理组件处,船体上浮使得漂浮物残留于浮体上,浮体受漂浮物以及自身重力影响,绕船体旋转打开储料室,同时活塞组件驱动清理组件往复摆动,清理组件喷洒水将浮体上残留的漂浮物冲入储料室,完成漂浮物的收集,收集完成后,打开控制阀,水进入储蓄室使得船体下沉至预设位置,浮体在浮力作用下复位关闭储料室,漂浮物留存于储料室,重复上述动作,可反复收集大量水面漂浮物,具有强度低、效率高且成本低的优点。
附图说明
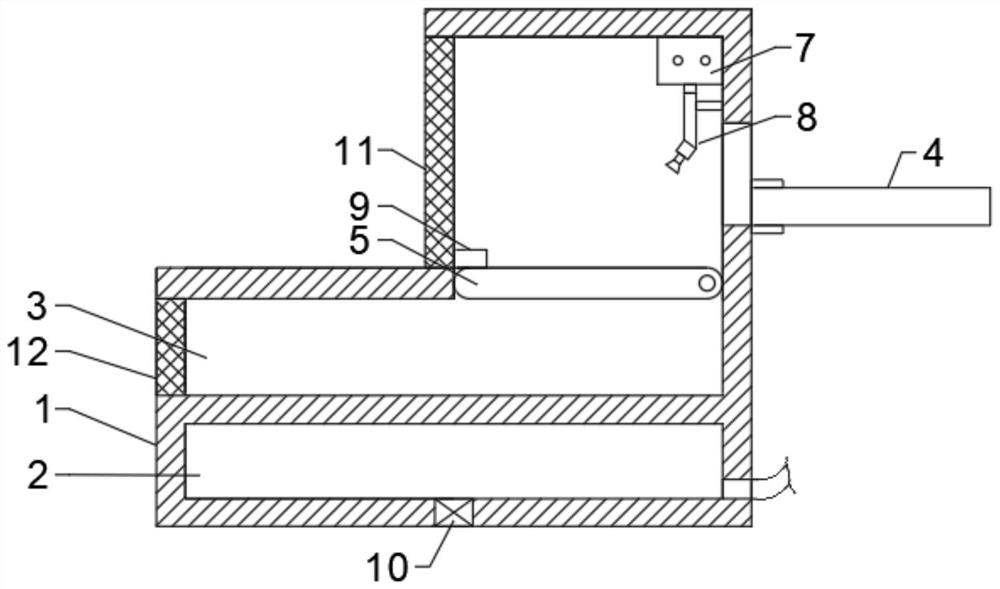
图1为本发明实施例提供的一种水面漂浮物无人收集船的结构示意图;
图2为本发明实施例提供的驱动组件、活塞组件和清理组件的结构示意图;
图3为图2另一状态的结构示意图;
图4为本发明实施例提供的活塞件的结构示意图;
图5为本发明实施例提供的一种水面漂浮物无人收集船的结构俯视示意图;
附图中:1-船体、2-储蓄室、3-储料室、4-收集组件、41-导向件、42-电动转轴、5-浮体、6-驱动组件、61-转轴、62-凸轮、7-活塞组件、71-活塞缸、72-活塞件、721-移动板、722-活塞杆、723-活塞、724-齿条、73-弹性件、8-清理组件、81-摆动件、811-残齿轮、812-摆动杆、82-喷洒件、9-挡块、10-控制阀、11-第一滤网、12-第二滤网。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合具体实施例对本发明的具体实现进行详细描述。
如图1、图2和图5所示,为本发明的一个实施例,包括:
船体1,所述船体1内设有用于储存水的储蓄室2和用于储存漂浮物的储料室3;
浮体5,所述浮体5与所述船体1活动连接,所述浮体5用于启闭储料室3;
驱动组件6,所述驱动组件6与所述船体1连接,所述驱动组件6连接有活塞组件7,所述活塞组件7连接有清理组件8,所述驱动组件6用于驱动活塞组件7往复直线移动,所述活塞组件7通过往复直线移动将储蓄室2中的水送至清理组件8,以及驱动清理组件8往复摆动,所述清理组件8用于喷洒水进而将浮体5上漂浮物冲入储料室3。
在本发明的一个实施例中,该水面漂浮物无人收集船,针对人工打捞工作强度高、效率低且成本高的问题,设置有驱动组件6,所述驱动组件6驱动活塞组件7往复直线移动,活塞组件7通过往复直线移动将储蓄室2中的水送至清理组件8,船体1自身重量减轻,船体1上浮,漂浮物留存于浮体5上,船体1浮起使得浮体5在漂浮物和重力作用下旋转打开储料室3,所述浮体5可为浮板,采用密度小于水的密度的材料制成,活塞组件7通过往复直线移动驱动清理组件8往复摆动冲洗浮体5,将漂浮物冲入储料室3,实现船体1自动收集漂浮物,具有强度低、效率高且成本低的优点。
进一步,所述船体1进料口处设有收集组件4,所述收集组件4包括导向件41和电动转轴42,所述导向件41可为导向板,所述电动转轴42与所述船体1活动连接,所述电动转轴42与所述导向件41固定连接,所述电动转轴42通过旋转驱动导向件41旋转进而密闭船体1进料口或者对漂流物进行导向,将漂流物导入船体1。
进一步,所述船体1位于储蓄室2处设有控制阀10,所述船体1位于储料室3处连接有第二滤网12,所述船体1连接有第一滤网11,所述第一滤网11用于将漂流物存留于船体1,所述第二滤网12用于连通储料室3和外界以及将漂流物存留于储料室3,所述控制阀10通过启闭控制水进入储蓄室2。
进一步,所述船体1上设有GPS定位装置,当船体1偏离预定区域时可报警,亦可防盗。
进一步,所述储料室3内设有摄像头,摄像头电连接有控制系统,摄像头用于观测储料室3内的漂浮物,当储料室3收集满漂浮物时,摄像头将信息反馈给控制系统,控制系统自动报警提醒操作或管理人员。
请参阅图1至图4,在本发明的一个实施例中,所述活塞组件7包括活塞缸71、活塞件72和弹性件73,所述活塞缸71与所述船体1连接,所述活塞缸71与所述储蓄室2连通,所述活塞缸71与所述活塞件72活动连接,所述活塞件72和活塞缸71之间设有用于活塞件72复位的弹性件73,所述活塞件72与所述驱动组件6连接。
在本实施例中,所述驱动组件6包括转轴61和凸轮62,所述转轴61固定连接有电机的输出轴,所述转轴61与所述凸轮62固定连接,所述凸轮62抵触活塞组件7,所述活塞件72包括移动板721、活塞杆722、活塞723和齿条724,所述活塞723与所述活塞缸71活动连接,所述活塞723与所述活塞杆722固定连接,所述活塞杆722上套设有弹性件73,所述弹性件73可为弹簧,所述活塞杆722与所述移动板721固定连接,所述移动板721一侧抵触驱动组件6,所述移动板721与所述齿条724固定连接,所述齿条724与所述清理组件8活动连接,所述活塞缸71的进水口和出水口处均设有单向阀,所述活塞缸71的进水口通过管道与所述储蓄室2连通,所述活塞缸71的出水口通过管道与所述清理组件8连通,电机通过转轴61带动凸轮62旋转,凸轮62配合弹性件73抵触移动板721进而通过活塞杆722带动活塞723往复直线移动,活塞723通过往复直线移动并且配合活塞缸71和单向阀将储蓄室2的水送至清理组件8喷洒出,船体1自身重量减轻,船体1上浮,漂浮物留存于浮体5上,浮体5受漂浮物以及自身重力影响,绕船体1旋转打开储料室3,清理组件8往复摆动并且冲洗浮板,将漂浮物冲入储料室3。
进一步,所述船体1上设有若干挡块9,所述挡块9用于限位浮体5。
进一步,可在船体1的储蓄室2处设置管道连通外界空气,防止储蓄室2内水被送至喷洒件82时导致储蓄室2内部压力变小。
请参阅图1至图4,在本发明的一个实施例中,所述清理组件8包括摆动件81和喷洒件82,所述摆动件81一端与所述活塞组件7活动连接,另一端与所述喷洒件82连接,所述喷洒件82与所述活塞组件7连通,所述喷洒件82用于冲洗浮体5,所述活塞组件7驱动摆动件81往复摆动进而带动喷洒件82往复摆动。
在本实施例中,所述摆动件81包括残齿轮811和摆动杆812,所述残齿轮811与所述船体1转动连接,所述残齿轮811与所述活塞组件7啮合,所述残齿轮811与所述摆动杆812固定连接,所述摆动杆812与所述喷洒件82固定连接,所述喷洒件82可为喷头,所述喷头通过管道与所述活塞缸71连通,所述移动板721驱动齿条724往复直线移动,所述齿条724通过与残齿轮811啮合以及配合摆动杆812带动喷洒件82往复摆动冲洗浮体5上残留的漂浮物;所述清理组件8还可以采用齿轮、下齿条和喷洒件82,齿条724与齿轮啮合,齿轮与下齿条啮合,下齿条与船体1滑动连接,所述下齿条与所述喷洒件82固定连接,齿条724通过齿轮和下齿条带动喷洒件82往复直线移动。
工作原理:
打开控制阀10,水进入储蓄室2使得船体1下沉至预设位置,关闭控制阀10,漂浮物通过收集组件4进入船体1内,并且在第一滤网11的作用下留存于浮体5上方,驱动组件6驱动活塞组件7将储蓄室2中的水送至清理组件8处,船体1上浮使得漂浮物残留于浮体5上,浮体5受漂浮物以及自身重力影响,绕船体1旋转打开储料室3,同时活塞组件7驱动清理组件8往复摆动,清理组件8喷洒水将浮体5上残留的漂浮物冲入储料室3,完成漂浮物的收集,收集完成后,打开控制阀10,水进入储蓄室2使得船体1下沉至预设位置,浮体5在浮力作用下复位关闭储料室3,并且由于漂浮物漂浮于水面,因此不会在浮体5复位过程中通过浮体5溢出储料室3,漂浮物留存于储料室3,重复上述动作,可反复收集大量水面漂浮物,具有强度低、效率高且成本低的优点。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 水面漂浮物收集装置及水面漂浮物清理船
- 一种收集水面漂浮物的双体式无人船