一种多目测距设备参数标定方法
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及车辆上的多目测距设备的参数标定领域,具有涉及一种多目测距设备参数标定方法。
背景技术
随着物联网、云计算、人工智能等技术不断发展,基于视觉的人工智能识别技术应用日益广泛,基于视觉的测距技术也日益广泛的应用于各种领域,如自动驾驶等。
当前基于视觉的测距方法主要包括单目测距和双目(或多目)测距两种,单目测距主要是根据目标在图像中的大小进行判断,依赖于对目标对象类型的识别,准确率相对较低。双目(多目)测距主要是依赖于特定目标在多摄像头成像中的偏离度,根据摄像头之间的距离和目标在多张图片中的位置偏差进行计算,从而对目标距离进行更精准的计算。
双目(多目)测距相对于单目测距,虽然具有精度高等优点,但是受限于生产工艺、安装环境等因素,各摄像头无法保持100%的平行。各摄像头的夹角对远距离目标进行测距计算时会存在较大的误差。故为保证测距精度,需要对每个设备进行摄像头夹角进行标定,并将标定结果固化到对应的距离计算模块中,为解决上述提,南京理工大学提出了一种光轴非平行双目测距方法(专利号:CN 105091849 A),进行两个摄像头夹角的标定。
在传统的双目测距标定过程中,一般需要双目测距设备出厂前即进行标定检测,然后将检测结果固化到测距计算模块中。这种模式存在如下这些问题:采集和计算模块必须紧耦合,视频/图像采集模块(摄像头部分)和距离计算模块必须紧耦合,无法单独更换;标定检测时间较长,必须同步完成标定图片的采集、标定结果计算和最终结果在计算模块中的写入;视频/图像采集模块必须采用高强度的框架设备,确保安装过程中不会导致摄像头之间夹角的变形,无法进行安装后的标定。
故此,在实际的规模化应用过程中,迫切需要一种快速标定检测、将数据采集与计算分离的方法,以满足工程化快速量产的需要。
发明内容
本发明的目的是提供一种多目测距设备参数标定方法,结合云端技术实现标定图像的采集、参数标定结果的运算、下发和应用。通过标定图像采集过检后进行参数标定运算、标定结果下发在云端的异步执行,可有效提升生产应用效率。在云端完成测距设备与标定结果的关联关系管理,可实现测距设备与测距计算的松耦合,两者无需同步更换。
本发明的技术方案为:
本发明提供了一种多目测距设备参数标定方法,包括:
获取车辆的测距设备上传的标定图像集;所述标定图像集中包含:车辆的M个测距设备分别针对N个测试目标采集的标定图像,N个测试目标分别与M个测距设备之间的距离,以及每一标定图像与对应的测距设备之间的关联关系;其中,N≥3;
基于N个测距设备分别针对M个测试目标采集的标定图像,确定N个测试目标分别与M个测距设备采集的标定图像的中心点之间的横向偏离度;
基于N个测试目标分别与M个测距设备采集的标定图像的中心点之间的横向偏离度、N个测试目标分别与M个测距设备之间的距离,计算M个测距设备中的第u个测距设备和第w个测距设备之间的距离、第u个测距设备的焦点到其所采集的标定图像之间的距离、第u个测距设备和第w个测距设备之间的角度、第w个测距设备的焦点到其所采集的标定图像之间的距离、第w个测距设备和第u个测距设备之间的角度;
将计算出的第u个测距设备和第w个测距设备之间的距离、第u个测距设备的焦点到其所采集的标定图像之间的距离、第u个测距设备和第w个测距设备之间的角度、第w个测距设备的焦点到其所采集的标定图像之间的距离、第w个测距设备和第u个测距设备之间的角度与对应的测距设备进行关联后打包,并在打包数据中添加当前版本信息后发送至车辆,实现多目测距设备参数标定。
其中,通过方程组(1)和方程组(2):
计算第u个测距设备和第w个测距设备之间的距离T、第u个测距设备的焦点到其所采集的标定图像之间的距离f
其中,H
本发明的有益效果为:
通过将云端技术应用于多目测距设备的标定和应用过程中,从而提升多目测距设备的标定效率,支持车辆上作为图像采集模块的测距设备与距离计算模块物理分离,提升设备安装的灵活性和适用性。
附图说明
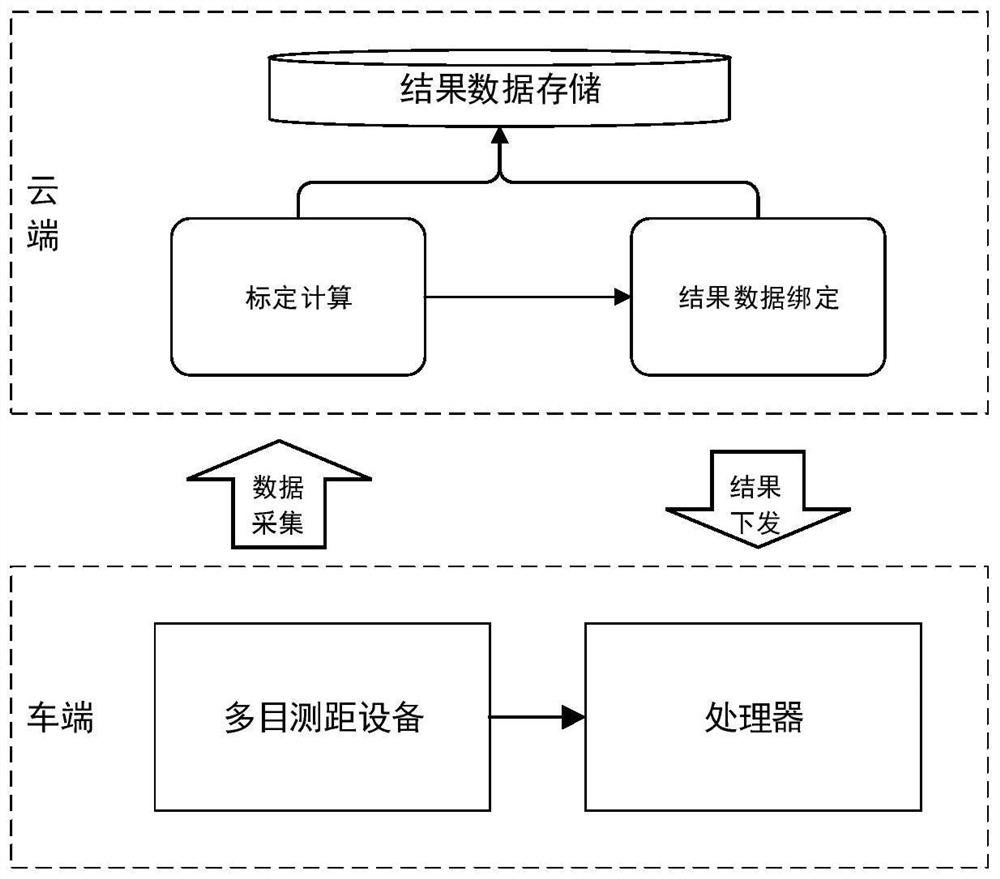
图1为基于云端的整体标定业务流程图;
图2为标定数据采集装置示意图;
图3为标定数据应用流程图;
图4为采集模块更换业务流程图。
具体实施方式
下面结合说明书附图对本发明进行进一步详细的说明。
本发明实施例提供了一种车载多目测距设备参数标定方法,该方法的应用,能够实现在云端对安装在车辆上的多目测距设备进行参数标定。
本实施例中,进行多目测距设备参数标定的过程包括标定图像采集、参数识别、参数标定结果下发和参数标定结果应用四个环节,具体流程如图1所示。
一、标定图像采集。
在进行图像采集之前,首先需要按照图2所示进行作为基准参照物的目标的布置,然后将测距设备放到指定位置(图2中的各cam位置)。在完成目标和测距设备的布置后,测量各测距设备与各目标在车辆纵向方向上的距离。
然后各测距设备针对各目标同时完成拍照动作,拍摄后,一张标定图像中即存在多个目标,此后再将拍摄到的图片作为标定图像集上传到云端,同时在上传的标定图像集中,还记录有各图片和各测距设备之间的关联关系。
具体来说,所述标定图像集中包含:车辆的M个测距设备分别针对N个测试目标采集的标定图像,N个测试目标分别与M个测距设备之间的距离,以及每一标定图像与对应的测距设备之间的关联关系;其中,N≥3。
基于N个测距设备分别针对M个测试目标采集的标定图像,确定N个测试目标分别与M个测距设备采集的标定图像的中心点之间的横向偏离度。
二、参数标定
在云端针对标定图像集进行标定数据计算以前,首先识别各目标在各个测距设备拍摄到的照片中的相对位置,计算其与标定图像的中心点之间的横向偏离度。其中,由于各测距设备所采集到的图像尺寸是已知的,通过各目标在各测距设备采集的标定图像中的所处位置,来确定各目标与该标定图像的中心点之间的横向距离(即本实施例中的横向偏离度)。
在本步骤中,进行参数标定的具体过程为:基于N个测试目标分别与M个测距设备采集的标定图像的中心点之间的横向偏离度、N个测试目标分别与M个测距设备之间的距离,计算M个测距设备中的第u个测距设备和第w个测距设备之间的距离、第u个测距设备的焦点到其所采集的标定图像之间的距离、第u个测距设备和第w个测距设备之间的角度、第w个测距设备的焦点到其所采集的标定图像之间的距离、第w个测距设备和第u个测距设备之间的角度。
其中,通过方程组(1)和方程组(2):
计算第u个测距设备和第w个测距设备之间的距离T、第u个测距设备的焦点到其所采集的标定图像之间的距离f
其中,H
下文以双目摄像头为例,说明目标在不同图像中的标定数据如何进行计算。
若两个测距设备完全平行,三个目标处于两个摄像头的前方,则满足:
其中H
假设上述的第一测距设备和第二设局设备之间存在一定的夹角θ,则可对上述公式进行变换,上述公式可以转换为:
在数据采集过程中,已知三个目标分别与第一测距设备的实际距离H
同理,可以采用上述类似的算法,计算多目测距设备中的任意两个测距设备之间相关的角度和横向距离。
三、标定结果的更新
在完成对测距设备的参数计算完成后,云端将计算好的参数按照key-value方式进行保存,其中key为测距设备编号,value中包含最终标定的参数值以及当前标定结果的版本号。
具体来说,将计算出的第u个测距设备和第w个测距设备之间的距离、第u个测距设备的焦点到其所采集的标定图像之间的距离、第u个测距设备和第w个测距设备之间的角度、第w个测距设备的焦点到其所采集的标定图像之间的距离、第w个测距设备和第u个测距设备之间的角度与对应的测距设备进行关联后打包,并在打包数据中添加当前版本信息后发送至车辆,实现多目测距设备参数标定。
标定结果在车载端的应用流程如图3所示。当车载端的处理控制器启动时,首先根据测距设备编号调用云端接口而从云端获取当前最新的标定结果版本号。若本地无标定结果缓存或本地标定参数版本号旧于云端的标定版本号,则调用云端结果获取最新的标定参数结果,完成自检后将其缓存到本地。若本地已有标定结果缓存且标定结果版本号不旧于云端版本时,无需更新标定结果缓存。
在利用标定后的参数进行计算时,根据缓存的最新参数标定结果,根据多个测距设备采集到的图片,执行相关的计算流程即可。
四、标定结果应用
如图4所示,当搭载在车辆上的测距设备更换后,首先要按照上述标定方法对新的测距设备进行标定,并将标定结果保存到云端。在测距设备更换后,相关处理控制器需对比原有标定数据是否为现有测距设备的标定结果是否一致,若发现测距设备已更换,则调用云端接口获取更新后的测距设备对应的标定结果,完成标定数据的更新。
当计算模块更换时,则按照常规流程(参照图3),直接进行标定数据的初始化即可。
- 一种多目测距设备参数标定方法
- 一种采用互拍法的多目相机外部方位参数标定方法