一种船舶舱盖舾装焊接智能化焊接台车
文献发布时间:2023-06-19 13:30:50
技术领域
本发明涉及自动化焊接技术领域,具体为一种船舶舱盖舾装焊接智能化焊接台车。
背景技术
外场使用的焊接台车,实现外场作业的机械化,但目前舱盖舾装焊接的智能化生产一直以来未有突破,无论人工焊接还是机械化台车焊接,对人的依赖项较高,需要人员的实时参与。机械化焊接台车虽然焊接效率提升较多,但期间焊接台车的调整,行进路线障碍的预判规避调整,占用时间较多;另外机械化台车对人员的操作技能也有较强的依赖性。
发明内容
为了解决现有的问题,本发明提供了一种船舶舱盖舾装焊接智能化焊接台车。
为了实现上述目的,本发明采用了如下技术方案:一种船舶舱盖舾装焊接智能化焊接台车,包括滑轨结构,所述滑轨结构固定连接在待焊接船舶上,所述滑轨结构的上方滑动连接有滑动座,所述滑动座的顶部固定连接有支撑柱,所述支撑柱的侧面滑动连接有副架体,所述副架体与支撑柱的顶部之间连接有控制气缸一,所述副架体的卡侧面设置有横向滑道,所述横向滑道的前侧滑动连接有两组主架体,两组所述主架体之间设置有控制气缸二;
所述主架体的侧面设置有枪头躲避结构,所述枪头躲避结构的动作端设置有焊接头;
还包括动力箱体,所述动力箱体的底部设置有滑座,所述滑座与滑轨结构滑动连接,所述动力箱体的底部设置有推动结构,所述动力箱体与滑动座固定连接。
作为上述技术方案的进一步描述:
还包括:超声传感结构,所述超声传感结构固定连接在副架体的一侧面,所述超声传感结构具有前、后两个探测头。
作为上述技术方案的进一步描述:
所述滑轨结构的顶部设置有传动齿条,所述推动结构包括步进电机,所述步进电机的输出端固定连接有齿轮件,所述齿轮件与传动齿条啮合传动。
作为上述技术方案的进一步描述:
所述枪头躲避结构包括支撑台,所述支撑台与主架体固定连接,所述支撑台的顶部固定连接有弧形齿条,所述支撑台的顶部活动连接有活动架,且活动架的回转中心与弧形齿条的圆心重合,所述活动架的顶部固定连接有驱动电机,所述驱动电机的输出端固定连接有传动齿轮,所述传动齿轮与弧形齿条啮合传动,所述活动架的侧面固定连接有焊接管路,所述焊接头固定连接在焊接管路的末端。
作为上述技术方案的进一步描述:
还包括:仿形调整靠轮机构,所述仿形调整靠轮机构的顶部与滑动座的底部固定连接,所述仿形调整靠轮机构具有一组活动轮,所述活动轮可以靠着滑轨结构的侧面行走。
作为上述技术方案的进一步描述:
还包括:移动小车,所述移动小车的顶台上固定连接有滑轨件,所述滑轨件的截面形状与滑轨结构的截面形状相同。
本发明的有益效果:本发明既可以实现舱盖附件双边的同时焊接,通过智能避让和焊缝跟踪,大大规避了事先调整工序的影响,另外通过智能操作大大解放了人的参与,很大程度上减低了对人的依赖性。本发明也实现了舱盖舾装外场智能化生产的突破,填补该领域的空白。
附图说明
为了更清楚地表示一种船舶舱盖舾装焊接智能化焊接台车,示出以下附图;
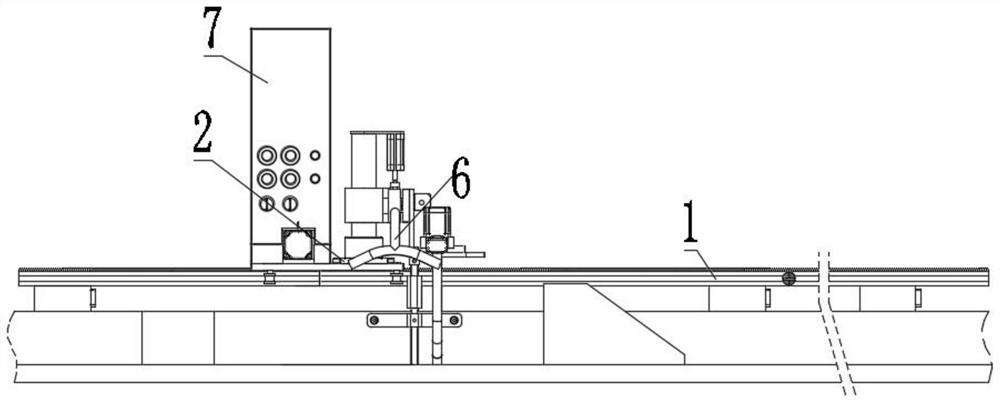
图1为本发明的整体结构示意图;
图2为本发明的俯视结构示意图;
图3为本发明的侧面结构示意图;
图4为本发明的立体结构示意图;
图5为图4中A处放大图;
图6为将本发明装在移动小车上的结构示意图。
其中附图中的标号;
1、滑轨结构;11、传动齿条;2、滑动座;3、支撑柱;4、副架体;5、控制气缸一;6、超声传感结构;7、动力箱体;8、枪头躲避结构;81、支撑台;82、弧形齿条;83、活动架; 84、焊接管路;85、驱动电机;86、传动齿轮;9、控制气缸二;10、移动小车;101、滑轨件;12、仿形调整靠轮机构。
具体实施方式
请参考附图1-6,示出了本申请实施例提供的一种船舶舱盖舾装焊接智能化焊接台车,包括滑轨结构1,滑轨结构1固定连接在待焊接船舶上,滑轨结构1的轨迹与船体的侧边贴合,滑轨结构1的上方滑动连接有滑动座2,滑动座2能够与滑轨结构1滑动连接,滑动座2的顶部固定连接有支撑柱3,支撑柱3的侧面滑动连接有副架体4,副架体4与支撑柱3的顶部之间连接有控制气缸一5,控制气缸一5带动副架体4上下移动,副架体4的卡侧面设置有横向滑道,横向滑道的前侧滑动连接有两组主架体,两组主架体之间设置有控制气缸二9,控制气缸二9也可以与横向滑道滑动连接,控制气缸二9能够带动两组主架体相近或者相离移动;
主架体的侧面设置有枪头躲避结构8,枪头躲避结构8的动作端设置有焊接头,在遇到障碍物的时候,能够带动焊接头向外侧移动,进行躲避障碍物;
还包括动力箱体7,动力箱体7的底部设置有滑座,滑座与滑轨结构1滑动连接,动力箱体7的底部设置有推动结构,动力箱体7与滑动座2固定连接,推动结构与滑轨结构配合,能够实现直线移动。
还包括:超声传感结构6,超声传感结构6固定连接在副架体4的一侧面,超声传感结构6具有前、后两个探测头,进行感应前后两侧的障碍物。
滑轨结构1的顶部设置有传动齿条11,推动结构包括步进电机,步进电机的输出端固定连接有齿轮件,齿轮件与传动齿条11啮合传动,步进电机带动齿轮件转动,齿轮件与传动齿条11啮合,带动动力箱体7直线移动。
枪头躲避结构8包括支撑台81,支撑台81与主架体固定连接,支撑台81的顶部固定连接有弧形齿条82,支撑台81的顶部活动连接有活动架83,且活动架83的回转中心与弧形齿条82的圆心重合,活动架83的顶部固定连接有驱动电机85,驱动电机85的输出端固定连接有传动齿轮86,传动齿轮86与弧形齿条82啮合传动,活动架83的侧面固定连接有焊接管路84,焊接头固定连接在焊接管路84的末端,障碍物避让的时候,驱动电机85动作,带动传动齿轮86,在反作用力的效果下,带动活动架83转动,实现避让的效果。
还包括:仿形调整靠轮机构12,仿形调整靠轮机构12的顶部与滑动座2的底部固定连接,仿形调整靠轮机构12具有一组活动轮,活动轮可以靠着滑轨结构1的侧面行走。
移动小车10,移动小车10的顶台上固定连接有滑轨件101,滑轨件101的截面形状与滑轨结构1的截面形状相同,一次焊接完成后,可以将装置滑动到移动小车10的上方,便于进行运输和转运本装置。
工作原理:使用的时候,先进行安装滑轨结构1,然后将装置滑动连接在滑轨结构1上,动力箱体7推动滑动座2移动,然后控制气缸一5能够调整副架体4上下移动,控制气缸二9能够控制两个主架体移动,枪头躲避结构8能够将焊接管路84及端部连接的焊头向外侧转动,能够避免障碍物与焊接头发生撞击。
本领域技术人员在考虑说明书及实践这里发明的公开后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
应当理解的是,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
- 一种船舶舱盖舾装焊接智能化焊接台车
- 一种船舶舾装焊接前的电磁预固定装置