基于特征权重池的动态特征选择的无人机视觉跟踪方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明属于目标跟踪技术领域,具体涉及一种基于特征权重池的动态特征选择的无人机视觉跟踪方法。
背景技术
目标跟踪是计算机视觉领域中的一个具有挑战性的问题,它在无人机中有极其广泛的应用。近年来视觉跟踪得到了有效的发展,但由于物体和无人机的快速运动、部分遮挡、几何变形等挑战,精确性和鲁棒性仍然是跟踪的艰巨任务。
一般来说,基于DCF的跟踪任务中集成了在线学习解决方案,这使得滤波器在各种挑战中保持令人满意的鲁棒性。具体来说,Yiming Li等人提出了一种基于STRCF的,具有自动时空正则化的高性能视觉跟踪方法AutoTrack。AutoTrack可以自动调整时空正则化项的超参数,并在实际场景中证明了其有效性和通用性。上述跟踪器虽然采用手工特征或深度特征来描述目标的外观,可以达到比较理想的跟踪效果,但未能在特征组合内探索不同特征的强度,并且使用固定纵横比的方法无法适应复杂的跟踪场景。当遇到相似目标干扰、尺度变换等挑战时,它们会失去鲁棒性和准确性。
针对上述问题,本发明提出基于特征权重池的动态特征选择的无人机视觉跟踪方法,使用动态特征选择方法提高滤波器精度,使用EdgeBoxes对优化滤波器尺度。
发明内容
本发明是针对跟踪框尺度和偏移不准确的基于特征权重池的动态特征选择的无人机视觉跟踪方法,旨在解决目标发生运动、尺度变化等复杂场景下导致的跟踪框尺度和角度的不稳定性与不准确性。
基于特征权重池的动态特征选择的无人机视觉跟踪方法,包括如下步骤:
(1)读取跟踪序列,获取跟踪目标的位置信息及尺度信息;
(2)提取目标特征,使用特征权重池中的特征权重对目标特征进行加权,获取多个加权后的特征通道;
(3)将所有特征通道与偏移滤波器进行卷积,获取多个响应图;
(4)计算响应图的峰值旁瓣比,使用峰值旁瓣比最高的响应图作为目标所处的位置的判断依据,并记录下最优响应图对应的特征权重及峰值;
(5)使用EdgeBoxes提取建议,建议中包括随机纵横比的尺度信息以及尺度信息对应的评分;
(6)放弃评分过高或过低的建议,筛选后的建议使用特征权重加权,随后与模型外观做高斯相关操作,得到建议的置信度,如果建议的置信度高于峰值,则保留建议;
(7)将建议尺度与基线滤波器估计的尺度进行线性融合;
在步骤2中,提取目标特征,形成特征通道x
S2.1特征权重池为:
S2.2使用特征权重池对特征通道进行加权:
其中,x
在步骤3中,将所有特征通道与偏移滤波器f
R
在步骤4中,计算响应图的峰值旁瓣比PSR(R
S4.1计算响应图的峰值旁瓣比:
PSR(R
S4.2记录下最优响应图对应的特征权重:
S4.3记录下最优响应图对应的峰值:
在步骤5中,EdgeBoxes利用边缘信息,判断搜索区域内的物体个数及物体尺度信息,输出随机纵横比的尺度信息以及尺度信息对应的评分。
在步骤6中,放弃评分过高或过低的建议,提取筛选后建议的目标特征,使用特征权重加权,随后将加权后特征与模型外观做高斯相关操作,得到建议的置信度,如果建议的置信度高于峰值,则保留建议,可分为如下步骤:
S6.1放弃评分过高或过低的建议:
当评分大于阈值0.9时,EdgeBoxes提出的信息与前一帧的信息基本相同,当评分小于阈值0.6时,建议包含过多的干扰信息;
S6.2将建议特征与模型外观做高斯相关操作:
ω
在步骤7中,将建议尺度与基线滤波器估计的尺度进行线性融合:
b=α(τ
α是减少尺寸突然变化带来的不稳定性的阻尼因子,b
本发明提供的方法相较于以往技术优点在于:
(1)分析手工特征组合内不同特征的可靠性,使用峰值旁瓣比判断特征在不同帧的可靠性,实现特征的动态选择。
(2)优化滤波器尺度估计,缓解滤波器使用固定纵横比带来的问题,增强滤波器的鲁棒性。
(3)当目标发生遮挡、尺度变换、相似物体干扰时,滤波器仍能进行准确有效的跟踪。
附图说明
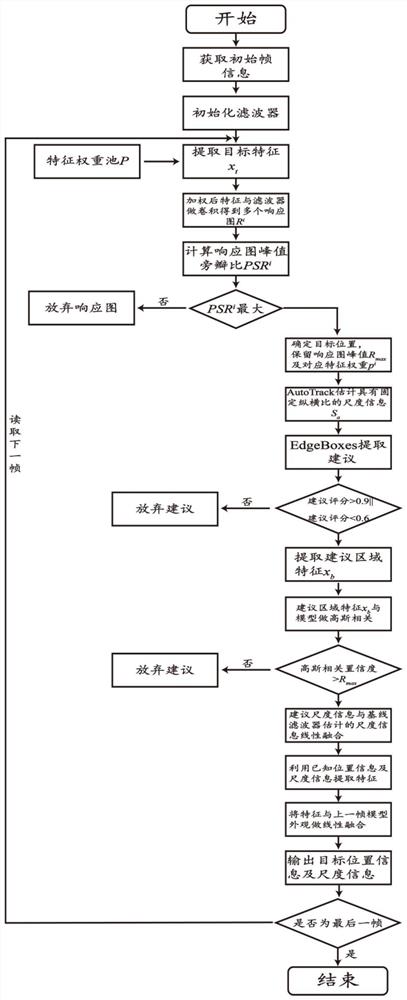
图1是本发明基于特征权重池的动态特征选择的无人机视觉跟踪方法流程图。
图2是AutoTrack算法针对uav0000294_00000_s第37帧的跟踪结果。
图3是本发明方法针对uav0000294_00000_s第37帧的跟踪结果。
图4是AutoTrack算法针对uav0000294_00000_s第43帧的跟踪结果。
图5是本发明方法针对uav0000294_00000_s第43帧的跟踪结果。
图6是AutoTrack算法针对uav0000294_00000_s第50帧的跟踪结果。
图7是本发明方法针对uav0000294_00000_s第50帧的跟踪结果。
图8是AutoTrack算法针对uav0000242_02327_s第2222帧的跟踪结果。
图9是本发明方法针对uav0000242_02327_s第2222帧的跟踪结果。
图10是AutoTrack算法针对uav0000242_02327_s第2231帧的跟踪结果。
图11是本发明方法针对uav0000242_02327_s第2231帧的跟踪结果。
图12是AutoTrack算法针对uav0000242_02327_s第2251帧的跟踪结果。
图13是本发明方法针对uav0000242_02327_s第2251帧的跟踪结果。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。参照图1,本发明提供的示例以AutoTrack跟踪算法为基线跟踪器,具体实施方式如下。
(1)读取跟踪序列,获取跟踪目标的位置信息及尺度信息;
(2)提取目标特征,形成特征通道x
2.1特征权重池为:
2.2使用特征权重池对特征通道进行加权:
其中,x
(3)将所有特征通道与偏移滤波器f
R
(4)计算响应图的峰值旁瓣比PSR(R
4.1计算响应图的峰值旁瓣比:
PSR(R
4.2记录下最优响应图对应的特征权重:
4.3记录下最优响应图对应的峰值:
(5)EdgeBoxes利用边缘信息,判断搜索区域内的物体个数及物体尺度信息,输出随机纵横比的尺度信息以及尺度信息对应的评分。
(6)放弃评分过高或过低的建议,提取筛选后建议的目标特征,使用特征权重加权,随后将加权后特征与模型外观做高斯相关操作,得到建议的置信度,如果建议的置信度高于峰值,则保留建议,可分为如下步骤:
6.1放弃评分过高或过低的建议:
当评分大于阈值0.9时,EdgeBoxes提出的信息与前一帧的信息基本相同,当评分小于阈值0.6时,建议包含过多的干扰信息;
6.2将建议特征与模型外观做高斯相关操作:
ω
(7)将建议尺度与基线滤波器估计的尺度进行线性融合:
b=α(τ
α是减少尺寸突然变化带来的不稳定性的阻尼因子,b
为了验证本发明的整体跟踪性能,本发明在单目标主流的跟踪平台VisDrone2018-test-dev数据集上进行了验证,对VisDrone2018-test-dev数据集上的35个视频进行了验证,在精确度和成功率两个指标上进行了整体评估。
在表1中,展示了在VisDrone2018-test-dev数据集下,本发明与AutoTrack跟踪器在精确度和成功率指标下的对比,如表中所示,相比基线AutoTrack跟踪器,本发明在精确度上提高2.6%,成功率提高约1.3%。
表1.VisDrone2018-test-dev数据集结果对比
图2、图4、图6是AutoTrack算法针对uav0000294_00000_s跟踪结果,黑色矩形框为跟踪框,在37帧时可跟踪到目标,但43帧和50帧时发生漂移;图3,图5,图7是本发明方法针对uav0000294_00000_s跟踪结果,能够准确地跟踪到目标;图8、图10、图12是AutoTrack算法针对uav0000242_02327_s的跟踪结果,在30帧、56帧和84帧跟踪框尺度不准确;图9、图11、图13是本发明方法针对uav0000242_02327_s跟踪结果,能够准确地跟踪到目标,并且跟踪框尺度与目标契合,因此本发明方法具有显著的跟踪性能。
- 基于特征权重池的动态特征选择的无人机视觉跟踪方法
- 基于特征提取和权重系数参数更新的高光谱目标跟踪方法