基于新能源汽车轨迹数据的卡口位置经纬度纠偏方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及智能交通控制技术领域,具体为基于新能源汽车轨迹数据的卡口位置经纬度纠偏方法。
背景技术
卡口数据一般包括两类信息:一类是记录实时检测到的动态过车信息,包括车牌号码、车牌颜色、卡口唯一编号、记录时间、行驶方向等;一类是静态的卡口点位信息,包括卡口唯一编号、卡口名称、卡口备案经纬度等。卡口数据作为交通大数据的重要组成部分,在交通管理领域有许多重要的应用。例如,卡口数据可以用来感知路面交通状态、识别车辆违法行为、缉查布控违法车辆等。然而,目前大部分卡口数据使用者并无有效手段确定卡口的备案经纬度是否准确。而不准确的卡口经纬度在应用的的时候,会导致计算结果产生极大的偏差,这极大的影响了卡口数据的应用范围。
发明内容
为了解决现有技术中,卡口位置经纬度的准确性无法确认的问题,本发明提供基于新能源汽车轨迹数据的卡口位置经纬度纠偏方法,其可以实现对卡口备案经纬度的自动校准,算法简单,可实施性强。
本发明的技术方案是这样的:基于新能源汽车轨迹数据的卡口位置经纬度纠偏方法,其特征在于,其包括以下步骤:
S1:设置计算周期T;T为时间段,表示采集每次T时间段内的数据参与本次计算,同时两次计算之间间隔T时间段;
S2:纠偏计算开始后,以开始时间为起点,采集以下数据参与本次计算;
采集所述计算周期T内的所有待校准卡口的新能源汽车的过车记录,记做校准用过车记录;
采集所述计算周期T内的所有的校准用新能源汽车的GPS轨迹记录,记做校准用GPS轨迹记录;
S3:建立map集合;
所述map集合包括:每个所述待校准卡口对应的卡口编号、每个所述待校准卡口对应的校准用经纬度集合;
所述校准用经纬度集合包括:所述卡口编号对应的所述校准用过车记录与所述校准用GPS轨迹记录匹配成功后的经纬度集合;
S4:设置最少匹配阈值S,所述最少匹配阈值S表示有效的匹配经纬度集合包含的最少轨迹数;
遍历所述map集合,依次找到所述校准用经纬度集合中轨迹点数大于等于最少匹配阈值S的所述待校准卡口,将其对应的所述卡口编号放入中待计算卡口集合中;
将所述待计算卡口集合中的所述待校准卡口关联的数据从所述map集合中删掉;
S5:依次从所述待计算卡口集合中取出每个所述卡口编号,将每个所述卡口编号对应的所有经纬度点的值取平均值,得到所述卡口编号对应的计算经纬度;
S6:计算每个所述计算经纬度与其对应的所述待校准卡口的备案经纬度之间的距离;
设置距离阈值D,当所述计算经纬度与所述备案经纬度之间的距离大于所述距离阈值D时,则将所述备案经纬度的值更新为所述计算经纬度;否则,所述备案经纬度的值保留原有值;
S7:确认所述map集合中是否还有剩余的所述待校准卡口;
如果有,以所述开始时间为起点,等待所述计算周期T,再次对所述map集合中剩余的所述待校准卡口,循环执行步骤S2~S6,进行下一轮纠偏计算;
否则结束纠偏计算。
其进一步特征在于:
在步骤S1执行之前,执行以下步骤:
a1:确定待校准卡口,确定校准用新能源汽车;
对所有的所述待校准卡口、所述校准用系能源汽车进行统一校时;
a2:确保所述校准用新能源汽车分别通过所有所述待校准卡口;
所述校准用过车记录包括:卡口编号、车辆号牌、过车时间信息;
所述校准用GPS轨迹记录包括:车辆号牌、轨迹上传时间、经纬度信息;
步骤S3中,所述校准用经纬度集合的计算方法包括以下步骤:
b1:逐一取出所述待校准卡口,找到其对应的所述校准用过车记录;
b2:将所述校准用过车记录中包括的新能源车的号牌筛选出来,记做卡口号牌记录;
b3:在所述卡口号牌记录中逐一取出每一个号牌,记做待确认号牌,其在所述校准用过车记录中对应的过车时间,记做待确认过车时间;
b4:在所述校准用GPS轨迹记录中找到所述待确认号牌对应的过车而时间,找对与所述待确认过车时间最接近的一条GPS经纬度数据,记做待确认GPS经纬度数据;
b5: 计算所述待确认过车时间与所述待确认GPS经纬度数据的上传时间的差值,记做匹配差值;
b6: 设置最大匹配时间误差阈值t,所述最大匹配时间误差阈值t表示所述校准用过车记录中的新能源汽车过车时间点与所述校准用GPS轨迹记录中的轨迹上传时间的进行有效匹配的最大允许时间差;
比较所述匹配差值和所述最大匹配时间误差阈值t;
当所述匹配差值小于所述最大匹配时间误差阈值t,则将所述待确认GPS经纬度数据写入所述校准用经纬度集合;
b7:循环执行步骤b3~b6,直至所述卡口号牌记录中所有的待确认号牌都被确认完毕;
b8:循环执行b1~b7,只是所述有的所述待校准卡口对应的所述卡口号牌记录都被确认完毕,则得到所述有所述待校准卡口对应的所述校准用经纬度集合。
本发明提供的基于新能源汽车轨迹数据的卡口位置经纬度纠偏方法,其根据待校准卡口的过车记录中的过车时间、车牌号码匹配经过该卡口所有新能源车辆,再根据每辆新能源车辆在该时间点上传的经纬度数据,构成由新能源汽车轨迹经纬度集合而成的校准用经纬度集合;根据校准用经纬度集合中的经纬度取平均值,得到待校准卡口对应的计算经纬度;通过对计算经纬度、待校准卡口的备案经纬度进行比较,通过距离阈值D判断备案经纬度是否需要更新,完成对待校准卡口的纠偏过程;本发明的方法基于新能源汽车轨迹数据完成对待校准卡口的自动校准,无需添加新的装置,成本较低;同时,算法简单,可实施性很强。
附图说明
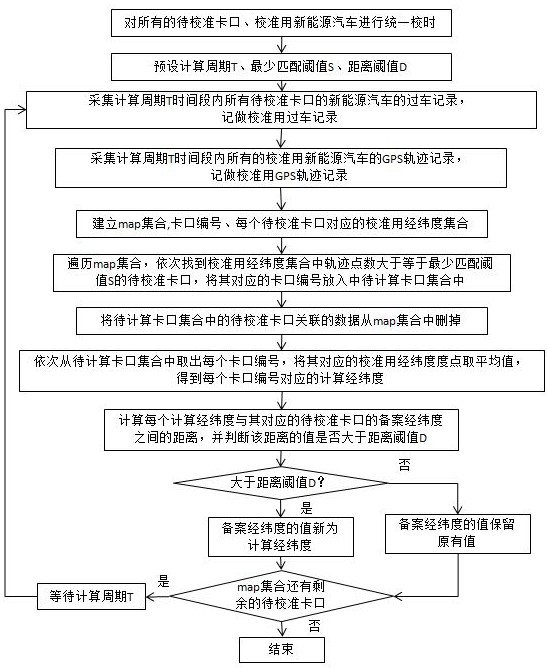
图1为本发明的卡口位置经纬度纠偏方法流程示意图。
具体实施方式
如图1所示,本发明的基于新能源汽车轨迹数据的卡口位置经纬度纠偏方法,其包括以下步骤。
S1:设置计算周期T;T为时间段,表示每隔T时间段采集数据参与本次计算;通过计算周期T来控制每次参与计算的数据的差异和数据量,确保本次因为数据量不足,无法参与计算被保留在map集合送的待校准卡口,在下次计算时有足够的数据参与计算,提高本发明纠偏方法的效率。本实施例中,计算周期T设置为30分钟。
在步骤S1执行之前,执行以下步骤:
a1:确定待校准卡口,确定校准用新能源汽车;
对所有的待校准卡口、校准用系能源汽车进行统一校时;
a2:确保校准用新能源汽车分别通过所有待校准卡口。
通常现实生活中,路测安装的卡口装置、实际运行的新能源汽车都是实时入网的设备,其系统时间都是通过网络校时完成的。但是在实验室环境下,或者不确定参与计算的装置时间是否同步,则需要人工校时,确保参与计算的装置时间是同步的,进而确保后续计算的准确性。
S2:纠偏计算开始后,以开始时间为起点,采集以下数据参与本次计算;
采集计算周期T内的所有待校准卡口的新能源汽车的过车记录,记做校准用过车记录;
采集计算周期T内的所有的校准用新能源汽车的GPS轨迹记录,记做校准用GPS轨迹记录;
校准用过车记录包括:卡口编号、车辆号牌、过车时间信息;
校准用GPS轨迹记录包括:车辆号牌、轨迹上传时间、经纬度信息。
设,卡口编号为1的待校准卡口,其对应的卡口过校准用过车记录照表1,
卡口编号为1的待校准卡口,其对应的卡口过校准用过车记录为空:
表1:卡口1的校准用过车记录
30分钟内,苏BD12345、苏BD23456、苏BD45678、苏BD56789对应的新能源汽车轨迹数据,参照表2: 校准用GPS轨迹记录;
表2: 校准用GPS轨迹记录
S3:建立map集合;
map集合包括:每个待校准卡口对应的卡口编号、每个待校准卡口对应的校准用经纬度集合;
校准用经纬度集合包括:卡口编号对应的校准用过车记录与校准用GPS轨迹记录匹配成功后的经纬度集合。
校准用经纬度集合的计算方法包括以下步骤:
b1:逐一取出待校准卡口,找到其对应的校准用过车记录;
b2:将校准用过车记录中包括的新能源车的号牌筛选出来,记做卡口号牌记录;
b3:在卡口号牌记录中逐一取出每一个号牌,记做待确认号牌,其在校准用过车记录中对应的过车时间,记做待确认过车时间;
b4:在校准用GPS轨迹记录中找到待确认号牌对应的过车而时间,找对与待确认过车时间最接近的一条GPS经纬度数据,记做待确认GPS经纬度数据;
b5: 计算待确认过车时间与待确认GPS经纬度数据的上传时间的差值,记做匹配差值;
b6:设置最大匹配时间误差阈值t,最大匹配时间误差阈值t表示校准用过车记录中的新能源汽车过车时间点与校准用GPS轨迹记录中的轨迹上传时间的进行有效匹配的最大允许时间差;通过最大匹配时间误差阈值t来确保参与计算的新能源汽车的GPS轨迹数据和卡口过车数据的时空一致性,本实施例中,最大匹配时间误差t设为5分钟;
比较匹配差值和最大匹配时间误差阈值t;
当匹配差值小于最大匹配时间误差阈值t,则将待确认GPS经纬度数据写入校准用经纬度集合;
b7:循环执行步骤b3~b6,直至卡口号牌记录中所有的待确认号牌都被确认完毕;
b8:循环执行b1~b7,只是有的待校准卡口对应的卡口号牌记录都被确认完毕,则得到有待校准卡口对应的校准用经纬度集合。
本发明技术方案中,基于经过待校准卡口的所有的新能源汽车的GPS轨迹记录,来对待校准卡口进行纠偏,无需人工逐一实地核实检测标定卡口经纬度正确性,创新了卡口经纬度的自动校准的机制,提高了卡口定位精度的准确性,进而为通过卡口来感知路面交通状态、识别车辆违法行为、缉查布控违法车辆等应用提供良好的数据基础。
基于表1和表2的数据,进行校准用经纬度集合的计算。
首先选取号牌为苏BD12345的车辆gps轨迹与卡口1的过车轨迹进行匹配,表2中苏BD12345的卡口过车时间为2021-09-08 10:10:10,则选取表3中对应车辆与该时间对应的最近一条记录为:2021-09-08 10:10:10,两时间戳的时间差为0 分钟小于5分钟,则该条记录匹配成功。将对应经纬度[120.1,30.1]写到key为1的map集合中。
接着,选取号牌为苏BD23456的车辆gps轨迹与卡口1的过车轨迹进行匹配,表2中苏BD23456对应的卡口过车时间为2021-09-08 10:10:10,则选取表3中对应车辆与该时间对应的最近条记录为:2021-09-08 10:15:10,两时间戳的时间差为5分15秒,大于5分钟,则该记录匹配不成功。
选取号牌为苏BD56789的车辆gps轨迹与卡口1的过车轨迹进行匹配,表2中苏BD56789对应的卡口过车时间为:2021-09-08 10:25:10,则选取表3中对应车辆与该时间对应的最近条记录为:2021-09-08 10:26:10,两时间戳的时间差为1分钟,则该条记录匹配成功。将对应经纬度[120.2,30.2]写到key为1的map集合中。
同理号牌苏BD34567和苏BD45678进行匹配,最终得到map集合,如表3所示:
表3:map集合
表3中key为卡口编号,Value为校准用经纬度集合,[120.1,30.1]表示经度为120.1,纬度为30.1的坐标;表3中,卡口2对应的校准用经纬度集合为空。
S4:设置最少匹配阈值S,最少匹配阈值S表示有效的匹配经纬度集合包含的最少轨迹数;
遍历map集合,依次找到校准用经纬度集合中轨迹点数大于等于最少匹配阈值S的待校准卡口,将其对应的卡口编号放入中待计算卡口集合中;
将待计算卡口集合中的待校准卡口关联的数据从map集合中删掉。
通过最少匹配阈值S来确保参与计算的校准用经纬度集合中参与计算的数据足够多,进而提高基于卡尔曼滤波算法进行轨迹平滑计算后得到的计算经纬度准确性;本实施例中,最少匹配阈值S取值为2。
从表3中,确认map集合中轨迹点数量大于最少匹配阈值S的记录,得到表4待计算卡口集合:
表4:待计算卡口集合
将待计算卡口集合中的待校准卡口关联的数据从map集合中删掉,轨迹点数小于等于2的仍保留在map集合中。则map集合更新为表5;
表5:更新后的map集合
S5:依次从待计算卡口集合中取出每个卡口编号,将每个卡口编号对应的所有经纬度点的值取平均值,得到卡口编号对应的计算经纬度。
对表4中每个key对应的所有经纬度点的值取平均值。卡口1对应的轨迹集合的平均值为[120.15,30.15],即为卡口1的计算经纬度。
S6:计算每个计算经纬度与其对应的待校准卡口的备案经纬度之间的距离;
设置距离阈值D,当计算经纬度与备案经纬度之间的距离大于距离阈值D时,则将备案经纬度的值更新为计算经纬度;否则,备案经纬度的值保留原有值;通过距离阈值D的设置,排除经纬度的误差值量。新能源汽车轨迹数据的经纬度点也有误差,本发明通过阈值D来排除因为轨迹经纬度误差导致计算经纬度和备案经纬度的不同的情况;本实施例中,距离阈值D设为500米。
假设卡口1的备案经纬度为[120.1,30.1],则计算经纬度与备案经纬度相距7300米,大于设定距离阈值500米,则需要将卡口1 的卡口备案经纬度改为计算经纬度[120.15,30.15]。
S7:确认map集合中是否还有剩余的待校准卡口;
如果有,以开始时间为起点,等待计算周期T,再次对map集合中剩余的待校准卡口,循环执行步骤S2~S6,进行下一轮纠偏计算;
否则结束纠偏计算。
表5中仍然存在卡口编号为2的待校准卡口,则等到30分钟之后,再次针对卡口2进行纠偏计算。
使用本发明的技术方案后,利用新能源汽车实时上传的gps轨迹定位数据,实现对卡口备案经纬度的自动校准,算法简单,可实施性强,特别是精准的卡口位置有利于隐患新能源汽车的卡口联网布控缉查,为新能源汽车运行风险管控提供技术支持。
- 基于新能源汽车轨迹数据的卡口位置经纬度纠偏方法
- 基于位置与卡口轨迹比对的运输监管系统及其监管方法