可拉伸应变传感器材料及其制备方法和应用
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及传感器技术领域,具体涉及一种可拉伸应变传感器材料及其制备方法和应用。
背景技术
近年来,在可穿戴电子领域对柔性传感器的需求越来越大。其通过拉伸应变传感器可将机械形变转化为可探测的电学信号,在智能机器人、医疗监测、人机交互界面及仿生假肢等领域都展现出良好的应用前景。对于人体运动监测,理想的应变传感器件须兼具高拉伸率、高灵敏度以及良好的稳定性,从而为实现全尺度人体运动检测提供可能。
目前,可拉伸应变传感器的伸缩性主要基于弹性基材自身的拉伸极限,以及结构类传感器自身的结构设计。前者主要针对导电材料与弹性基材的结合方式,包括导电薄膜沉积或转移到弹性聚合物基材上,其传感原理主要是基于导电薄膜产生裂纹以及重叠的导电区的形成,但该裂纹的形成并不容易操纵,并且在很多情况下,尤其是当产生大而长的裂纹时,感应范围相对较低。不仅如此,由于导电纳米材料和聚合物基体的机械性能和表面性能差异很大,因此在经受周期性的加载/卸载条件时,导电材料薄片和弹性体基材之间经常会发生脱粘或分层。两者结合的第二种方式是将导电填料直接填充于弹性基材中,其传感原理是基于导电材料之间的分离。但导电材料通常与弹性体不相容,并且倾向于在基体中形成附聚物。需借助如剪切混合,超声处理,均质化等分散技术以改善导电材料在弹性体基质中的分散性。同时,导电填料直接影响弹性基材自身的可拉伸性。结构类的传感器多针对一些导电薄膜类材料,通过设计具有大变形能力的结构制备可拉伸传感器,例如分形和蛇形结构,面外波浪形结构,Kirigami结构和3D多孔结构等来提升拉伸率,但其灵敏度较低。
一些可拉伸应变传感器虽然已取得良好的传感性能,但同时实现高灵敏度和宽传感范围仍然是一个主要挑战。
发明内容
基于此,有必要提供一种兼具高灵敏度和宽传感范围的可拉伸应变传感器材料及其制备方法和应用。
本发明的第一目的在于提供一种可拉伸应变传感器材料,包括石墨烯气凝胶层、金属网络层和有机聚合物弹性材料,所述金属网络层叠加在所述石墨烯气凝胶层上,所述石墨烯气凝胶层中具有定向排列的石墨烯片,所述定向排列的石墨烯片的直立方向与所述叠加方向一致,所述定向排列的石墨烯片之间通过石墨烯连接,所述有机聚合物弹性材料填充在所述石墨烯气凝胶层的孔隙和所述金属网络层的孔隙中,所述可拉伸应变传感器材料具有多个朝向所述叠加方向贯穿的通孔,使得所述可拉伸应变传感器材料形成网格状镂空结构。
本发明的第二目的在于提供一种可拉伸应变传感器,包括上述任一实施例所述的可拉伸应变传感器材料以及与所述可拉伸应变传感器材料电连接的引线。
本发明的第三目的在于提供上述任一实施例所述的可拉伸应变传感器材料在可穿戴电子器件、智能机器人、医疗监测仪器或仿生假肢中的应用。
本发明的第四目的在于提供上述任一实施例所述的可拉伸应变传感器材料的制备方法,包括以下步骤:
将石墨烯粉体在水中分散得到石墨烯墨水;
将所述石墨烯墨水注入模具中,所述模具的底部具有多个凸起结构,所述多个凸起结构形成网格状阵列;
将注入有所述石墨烯墨水的模具置于液氮中进行冷冻成型,使所述石墨烯墨水形成石墨烯冰层,所述液氮的挥发方向为自所述模具的底部向顶部的方向;
在所述石墨烯冰层上涂布网格分布的金属液并进行冷冻;
对涂布有网格分布的金属液的石墨烯冰层进行冷冻干燥,得到叠加设置的石墨烯气凝胶层和金属网格层;
将液态的有机聚合物弹性材料注入叠加设置的所述石墨烯气凝胶层和所述金属网格层中,然后进行固化。
本发明的可拉伸应变传感器材料包括石墨烯气凝胶层、金属网络层和有机聚合物弹性材料,所述金属网络层叠加在所述石墨烯气凝胶层上。可拉伸应变传感器材料具有三阶结构,第一阶结构为材料整体为网格状镂空结构,网格状镂空结构由于具有中间的镂空通孔,使得材料的拉伸度变大,通过设计第一阶结构扩大了该材料的拉伸范围;第二阶结构为定向排布的石墨烯气凝胶结构,定向排列的石墨烯片的直立方向与通孔的朝向方向一致,直立石墨烯片之间通过石墨烯连接,形成三维网络石墨烯结构,通过该第二阶结构的设计,保证了三维导电网络的力学完整性和稳定性;第三阶结构为金属网络层,通过增加第三阶结构,使得该材料在小应变范围以及大应变范围内都保持高灵敏度。将材料用于制备拉伸应变传感器,能够在从微小形变到大形变条件下的宽拉伸范围中实现较高的灵敏度,具有良好的可靠性及循环稳定性。
附图说明
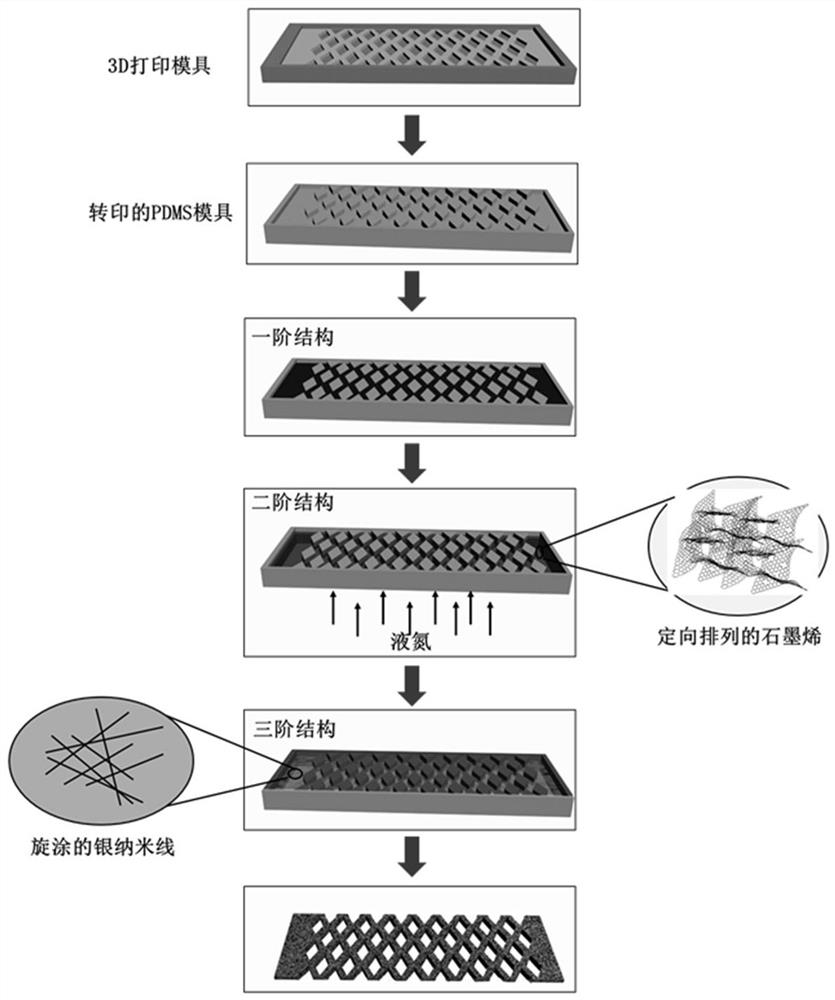
图1为本发明一实施例的可拉伸应变传感器材料的制备流程示意图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明中所使用的术语“含有”、“包含”和“包括”是同义词,其是包容性或开放式的,不排除额外的、未被引述的成员、元素或方法步骤。
第一方面,本发明实施例提供一种可拉伸应变传感器材料,包括石墨烯气凝胶层、金属网络层和有机聚合物弹性材料,所述金属网络层叠加在所述石墨烯气凝胶层上,所述石墨烯气凝胶层中具有定向排列的石墨烯片,所述定向排列的石墨烯片的直立方向与所述叠加方向一致,所述定向排列的石墨烯片之间通过石墨烯连接,所述有机聚合物弹性材料填充在所述石墨烯气凝胶层的孔隙和所述金属网络层的孔隙中,所述可拉伸应变传感器材料具有多个朝向所述叠加方向贯穿的通孔,使得所述可拉伸应变传感器材料形成网格状镂空结构。
本发明的可拉伸应变传感器材料包括石墨烯气凝胶层、金属网络层和有机聚合物弹性材料,所述金属网络层叠加在所述石墨烯气凝胶层上。可拉伸应变传感器材料具有三阶结构,第一阶结构为材料整体为网格状镂空结构,网格状镂空结构由于具有中间的镂空通孔,使得材料的拉伸度变大,通过设计第一阶结构扩大了该材料的拉伸范围;第二阶结构为定向排布的石墨烯气凝胶结构,定向排列的石墨烯片的直立方向与通孔的朝向方向一致,直立石墨烯片之间通过石墨烯连接,形成三维网络石墨烯结构,通过该第二阶结构的设计,保证了三维导电网络的力学完整性和稳定性;第三阶结构为金属网络层,通过增加第三阶结构,使得该材料在小应变范围以及大应变范围内都保持高灵敏度。将材料用于制备拉伸应变传感器,能够在从微小形变到大形变条件下的宽拉伸范围中实现较高的灵敏度,具有良好的可靠性及循环稳定性。
在一些实施方式中,所述通孔具有相同的尺寸和相同的形状。
在一些实施方式中,在未发生形变时,所述通孔具有相对于所述叠加方向的横截面形状;优选地,所述横截面形状为四边形。
可选地,所述横截面形状为正方形、邻边相等但对边不相等的四边形、邻边不相等但对边相等的四边形。优选的,所述横截面形状为菱形。
在一些实施方式中,所述菱形的长轴和短轴的比值为1~9。
优选的,所述菱形的长轴和短轴的比值为8~9,例如为8.56。
在一些实施方式中,所述通孔在所述可拉伸应变传感器材料中均匀分布。
在一些实施方式中,相邻的所述通孔之间的宽度相等。
在一些实施方式中,所述通孔形成通孔阵列,所述通孔阵列由多列组成,后一列的通孔排布于相邻前一列的两个相邻通孔之间。优选的,后一列的通孔排布于相邻前一列的两个相邻通孔之间的中轴线上。
在一些实施方式中,未填充所述有机聚合物弹性材料时,所述石墨烯气凝胶层的孔隙率为 95%~99%。
在一些实施方式中,所述石墨烯片的含氧量为15%~20%,优选为19%~20%,例如为19.67%。合适含氧量的石墨烯片能够实现在制备过程中于水中均匀分散,并且有利于后续的定向排布。
在一些实施方式中,所述石墨烯片的平均直径(片径)为 5 um ~10um。
在一些实施方式中,未填充所述有机聚合物弹性材料时,所述金属网络层的孔隙率为 30%-60%。
在一些实施方式中,所述通孔占所述可拉伸应变传感器材料的孔隙率为30%~60%。
石墨烯气凝胶层为主体,厚度可以为大于0.5mm。金属网络层覆盖于石墨烯气凝胶层表面,主要依靠线与线,线与面的搭接引起传感器在拉伸过程中电阻的变化,厚度约纳米级,两者厚度相差较大。
可选地,所述金属网络层的材料选自铜、金、银和铂中的任意一种或多种,优选为银。
在一些实施方式中,所述金属网络层的材料由金属纳米线交错堆叠形成。
在一些实施方式中,所述有机聚合物弹性材料选自橡胶。
橡胶是指具有可逆形变的高弹性聚合物材料,在室温下富有弹性,在很小的外力作用下能产生较大形变,除去外力后能恢复原状。
在一些实施方式中,所述橡胶选自合成橡胶。合成橡胶则由各种单体经聚合反应而得。
在一些实施方式中,所述橡胶选自丁苯橡胶、顺丁橡胶、异戊橡胶、丁腈橡胶、硅橡胶、乙丙橡胶及氯丁橡胶中的任意一种或多种。
在一些实施方式中,所述橡胶选自硅橡胶。硅橡胶是一种直链状的高分子量的聚硅氧烷。
在一些实施方式中,所述硅橡胶选自二甲基硅橡胶、甲基乙烯基硅橡胶、甲基苯基硅橡胶、氟硅橡胶、腈硅橡胶、乙基硅橡胶及乙基苯撑硅橡胶中的任意一种或多种。优选的,所述的硅橡胶为聚二甲基硅氧烷、室温硫化硅橡胶、Ecoflex等中的任意一种,更优选为聚二甲基硅氧烷。
第二方面,本发明实施例提供一种可拉伸应变传感器,包括上述任一实施例所述的可拉伸应变传感器材料以及与所述可拉伸应变传感器材料电连接的引线。
在一些实施方式中,所述引线与所述金属网络层和/或所述石墨烯气凝胶层连接。
所述引线与所述可拉伸应变传感器材料可以通过导电银胶或导电碳胶等粘接。
所述引线可以是直径介于2μm-2mm的铜导线、金导线、银导线或铂导线。
第三方面,本发明实施例提供上述任一实施例所述的可拉伸应变传感器材料在可穿戴电子器件、智能机器人、医疗监测仪器或仿生假肢中的应用。
第四方面,本发明实施例提供上述任一实施例所述的可拉伸应变传感器材料的制备方法,包括以下步骤:
a、将石墨烯粉体在水中分散得到石墨烯墨水;
b、将所述石墨烯墨水注入模具中,所述模具的底部具有多个凸起结构,所述多个凸起结构形成网格状阵列;
c、将注入有所述石墨烯墨水的模具置于液氮中进行冷冻成型,使所述石墨烯墨水形成石墨烯冰层,所述液氮的挥发方向为自所述模具的底部向顶部的方向;
d、在所述石墨烯冰层上涂布网格分布的金属液并进行冷冻;
e、对涂布有网格分布的金属液的石墨烯冰层进行冷冻干燥,得到叠加设置的石墨烯气凝胶层和金属网格层;
f、将液态的有机聚合物弹性材料注入叠加设置的所述石墨烯气凝胶层和所述金属网格层中,然后进行固化。
本发明的制备方法简便易于操作,避免了复杂的微纳加工工艺,制备成本低。制备的材料适用性广,能够灵活地对传感器性能进行调控,增加其应用范围。
在一些实施方式中,所述石墨烯粉体的制备方法包括:
在硫酸铵电解质中,将石墨箔和铂片分别作为正电极和负电极,施加工作电压使石墨箔剥离;
将剥离的石墨烯在水中分散并进行超声破碎;
将破碎后的石墨烯进行冷冻干燥。
优选的,所述硫酸铵电解质的浓度为0.01mol/L~1mol/L,工作电压为0~20V,所述超声破碎时间为10min~60min,所述冷冻干燥的时间为24h~72h。
在一些实施方式中,石墨烯墨水的制备方法包括:将石墨烯粉体与乙醇混合后进行超声;将超声液置于离心,去上清液得到底部浆料,加水混合,分散均匀形成石墨烯墨水。在一些实施方式中,石墨烯粉体在乙醇中超声的浓度为0.5 mg/L~2 mg/L,超声时间为10min~30min。离心转速为100rpm~8000rpm。离心时间为5min~30min。
在一些实施方式中,石墨烯墨水的浓度为5mg/mL~25mg/mL。
所述模具的凸起结构的形状、尺寸及位置分布与最终形成的可拉伸应变传感器材料的通孔的形状、尺寸及位置分布完全一致。
在一些实施方式中,置于液氮中进行冷冻成型的时间为5min~10min。采用自下而上的液氮冷冻方法,使得石墨烯定向排布,得到直立排布的石墨烯片。直立的石墨烯片与石墨烯片之间存在间隔,之间通过石墨烯作为连接,石墨烯片之间形成连锁效应和网格效应,也可以增加拉伸范围。
在一些实施方式中,石墨烯冰层在涂布金属液之前,转入低温冰箱冷冻。冷冻温度可以为-80℃~ -20℃,时间可以为0.5h~24 h。
可选地,涂布网格分布的金属液时的涂布方式可以包括:喷墨、撒播、凹版印刷、凸版印刷、柔印、纳米压印、丝网印刷、刮刀涂布和旋转涂布。
在一些实施方式中,涂布所述网格分布的金属液的方法为采用匀胶机将金属纳米线旋涂。
所述金属纳米线选自铜纳米线、金纳米线、银纳米线和铂纳米线中的任意一种或多种,优选为银纳米线。
在一些实施方式中,所述金属纳米线的直径为100nm~200nm,旋涂的转速为500rpm~2500rpm。
在一些实施方式中,对液态的有机聚合物弹性材料进行固化条件为30℃~100℃,时间位0.5h~24 h。具体的固化条件可根据实际情况选择。在一些实施方式中,有机聚合物弹性材料选自聚二甲基硅氧烷,固化条件为50℃~70℃,时间为1.5h~3 h。
以下为具体实施例。
实施例1
具体制备步骤如图1所示。
(1)选用电解质浓度为0.5mol/L,石墨纸、铂丝和硫酸铵溶液分别用作工作电极、反电极和电解质。即石墨纸接工作电源正极,铂片接工作电源负极,控制两极片间的距离,施加电压5v,然后将石墨烯进行剥离。将剥离后的溶液利用蒸馏水进行抽滤洗涤3-5次。取洗涤完成的成品再次分散于蒸馏水中,进行超声10min,放置-80℃冰箱预冷冻3-5h,随后放入冻干机冷冻干燥2~3天,即得到石墨烯粉末。
(2)使用3D打印机制备带有菱形凹下形状的树脂模具,菱形的纵横比为8.5,在模具中浇筑聚二甲基硅氧烷,放入80℃烘箱中固化3h,固化后从树脂模具上揭下,得到带有凹槽的柔性模具。
(3)称取0.2g石墨烯粉末加入100mL乙醇中超声10min,并将其置于离心管中,设置转速为2000r,时间为10min离心得出底部浆料,倒掉上清液,加水至20mL,混合搅拌10min。形成分散均匀的石墨烯墨水,将其注入带有凹槽的柔性模具形成一阶结构。
(4)将装有石墨烯墨水的柔性模具置于液氮表面10min,由下至上定向冷冻,后转入-80℃的低温冰箱待用形成二阶结构的定向排布的石墨烯冰层。
(5)设置匀胶机的转速为750r/min,时间为1min,将1mL的银纳米线旋涂至石墨烯冰层上,转入-80℃的低温冰箱,冷冻30min,后将其转入冷冻干燥机中,冷冻干燥24h,得到气凝胶双层结构。
(6)用导电银胶将气凝胶的两端与铜丝粘接,引入外接电极。将聚二甲基硅氧烷滴涂于气凝胶双层结构表面并放置于容器中抽真空使聚二甲基硅氧烷充分填入气凝胶孔内部。随后放入60℃烘箱中固化2h,得到具有三阶结构的可拉伸应变压力传感器。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,便于具体和详细地理解本发明的技术方案,但并不能因此而理解为对发明专利保护专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准,说明书可以用于解释权利要求的内容。
- 可拉伸应变传感器材料及其制备方法和应用
- 一种可拉伸应变传感器及其制备方法和应用