一种磁栅尺的覆盖式充磁方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及磁栅尺充磁技术领域,特别是一种磁栅尺的覆盖式充磁方法。
背景技术
N、S磁极连续交替的磁栅尺在进行加工时,传统是设计同标准极宽值相同宽度的工装极头,采用多极绕线的方式,一次性充固定极数,然后移动一个工装极头的宽度再充磁,这个方法在实际长距离加工生产时,因为多极绕线存在一定的差异性,容易产生极间误差,且产生的长度累积误差难以消除,最终制造出来的磁栅尺精度较低,无法适用于高精度要求的场合。因此,亟需研发一种新的充磁方法,使充磁后得到的磁栅尺成品具有较高的精度,可以应用于高精度要求的场合。
发明内容
本发明的目的在于,提供一种磁栅尺的覆盖式充磁方法。它具有制造出来的磁栅尺精度高的优点。
本发明的技术方案:一种磁栅尺的覆盖式充磁方法,参与充磁的充磁头其充磁端具有3个紧邻设置的磁极,包括设置在中间的主磁极,主磁极两侧分别设有与主磁极极性相反的第一副磁极和第二副磁极,所有磁极均设有两条平行的磁极边界,定义磁栅尺成品的单极宽度为标准极宽,主磁极两条磁极边界之间的距离大于标准极宽,主磁极上靠近第一副磁极的磁极边界到第一副磁极上远离主磁极的磁极边界之间的距离小于等于标准极宽;充磁方法包括以下步骤:
步骤A、在充磁头下方放置可沿自身长度方向步进运动的待充磁磁栅尺,充磁头的充磁端朝向待充磁磁栅尺且各磁极的磁极边界垂直于待充磁磁栅尺,待充磁磁栅尺的步进运动方向为充磁头第二副磁极至第一副磁极的排列方向;
步骤B、充磁头通电,使待充磁的磁栅尺上产生与充磁头磁极相对应的一大两小三个磁极;
步骤C、磁栅尺步进运动过一个标准极宽的距离,充磁头改变通电方向,充磁头的各磁极与前一次充磁时的极性相反,其中,第一副磁极完整地落在前一次充磁得到的大磁极上且与其同性,对大磁极极性不产生影响,主磁极部分覆盖在前一次充磁得到的大磁极上且与其异性,被覆盖的部分因被再次充磁而改性,从而前一次充磁得到的大磁极经覆盖充磁后变成宽度与磁栅尺步进距离相同的标准磁极;
步骤D、多次重复步骤C,每次步进后充磁头改变一次通电方向,得到N、S标准磁极连续重复排列的磁栅尺成品。
与现有技术相比,本发明的有益效果体现在:本发明采用了中间主磁极、两侧副磁极紧邻排列的充磁头,主磁极的磁性较强,其主要充磁作用,尤其重要的是,主磁极的宽度大于标准极宽,由于主磁极和副磁极之间存在无磁区,单个无磁区加单个副磁极的宽度小于等于标准极宽,这也就意味着每次充磁后,主磁极所作用的区域形成的磁极宽度是大于标准极宽的,磁栅尺在每次充磁后会步进一个标准极宽的距离,这就使得充磁头的主磁极在步进后与前一次充磁的区域会有部分的重复,待下一次充磁时,充磁头各磁极极性反转,被覆盖的部分因被再次充磁而改性,从而前一次充磁得到的磁极经覆盖充磁后变成宽度与磁栅尺步进距离相同的标准磁极,本发明在保证充磁电源一致和充磁头温度一致的情况下,每次的充磁极宽精度主要就取决于移动的距离,能极大地保证极宽精度,制造出来的磁栅尺精度高。
前述的一种磁栅尺的覆盖式充磁方法中,第一副磁极和第二副磁极各自的两条磁极边界之间的距离相等,主磁极上靠近第二副磁极的磁极边界到第二副磁极上远离主磁极的磁极边界之间的距离小于等于标准极宽。
前述的一种磁栅尺的覆盖式充磁方法中,待充磁磁栅尺由驱动电机驱动,驱动电机的输出轴端设有旋转编码器,驱动电机、旋转编码器和充磁头均由控制系统控制。
前述的一种磁栅尺的覆盖式充磁方法中,当待充磁磁栅尺进行连续充磁加工时,旋转编码器反馈磁栅尺走过的距离,每走过一个标准极宽的距离,控制系统发出一个充磁指令,控制充磁头的通电电流方向,保证任意相邻两次充磁加工时充磁头的通电电流方向是相反的。
前述的一种磁栅尺的覆盖式充磁方法中,随着待充磁磁栅尺的多次步进,旋转编码器记录磁栅尺走过的总距离,当磁栅尺的步进次数与标准极宽的乘积值与磁栅尺走过的总距离值的差值大于标准极宽×0.02时,控制系统控制驱动电机,使磁栅尺下次步进的距离为(1±0.02)×标准极宽。
前述的一种磁栅尺的覆盖式充磁方法中,充磁头朝向待充磁磁栅尺的充磁端为三个矩形面,各矩形面的两条长边为各磁极的磁极边界,且长边大于待充磁磁栅尺的宽度。
前述的一种磁栅尺的覆盖式充磁方法中,主磁极两条磁极边界之间的距离值为(1.01~1.50)×标准极宽。
前述的一种磁栅尺的覆盖式充磁方法中,主磁极上靠近第一副磁极的磁极边界到第一副磁极上远离主磁极的磁极边界之间的距离值为(0.10~0.50)×标准极宽。
附图说明
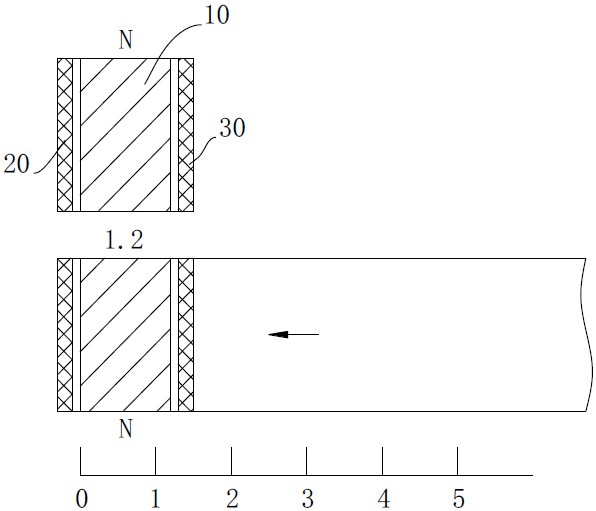
图1是第一次充磁时的状态示意图;
图2是第二次充磁时的状态示意图;
图3是第三次充磁时的状态示意图;
图4是第四次充磁时的状态示意图。
附图标记:10-主磁极,20-第一副磁极,30-第二副磁极。
具体实施方式
下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
实施例:一种磁栅尺的覆盖式充磁方法,参与充磁的充磁头其充磁端具有3个紧邻设置的磁极,包括设置在中间的主磁极10,主磁极10两侧分别设有与主磁极10极性相反的第一副磁极20和第二副磁极30,所有磁极均设有两条平行的磁极边界,定义磁栅尺成品的单极宽度为标准极宽,主磁极10两条磁极边界之间的距离大于标准极宽,主磁极10上靠近第一副磁极20的磁极边界到第一副磁极20上远离主磁极的磁极边界之间的距离小于等于标准极宽,该设置使得第一副磁极20在充磁时不会影响到前一次充磁后磁极的极性。
作为优选,第一副磁极20和第二副磁极30各自的两条磁极边界之间的距离相等,主磁极10上靠近第二副磁极30的磁极边界到第二副磁极30上远离主磁极的磁极边界之间的距离小于等于标准极宽,两个副磁极采用相同的结构使得磁栅尺的运动方向选择更大,可以选择两个方向中的一个进行连续充磁。
作为优选,充磁头朝向待充磁磁栅尺的充磁端为三个矩形面,各矩形面的两条长边为各磁极的磁极边界,且长边大于待充磁磁栅尺的宽度,能使充磁更加完全,充磁效果好。
作为优选,待充磁磁栅尺由驱动电机驱动,驱动电机的输出轴端设有旋转编码器,驱动电机、旋转编码器和充磁头均由控制系统控制。
作为优选,在本实施例中,选择主磁极10两条磁极边界之间的距离值为1.2×标准极宽,选择主磁极10上靠近第一副磁极20的磁极边界到第一副磁极20上远离主磁极的磁极边界之间的距离值为0.3×标准极宽。
待充磁磁栅尺连续充磁的具体步骤:
步骤A、在充磁头下方放置可沿自身长度方向步进运动的待充磁磁栅尺,充磁头的充磁端朝向待充磁磁栅尺且各磁极的磁极边界垂直于待充磁磁栅尺,待充磁磁栅尺的步进运动方向为充磁头第二副磁极30至第一副磁极20的排列方向。
步骤B、充磁头通电,使待充磁的磁栅尺上产生与充磁头磁极相对应的一大两小三个磁极。
步骤C、磁栅尺步进运动过一个标准极宽的距离,充磁头改变通电方向,充磁头的各磁极与前一次充磁时的极性相反,其中,第一副磁极20完整地落在前一次充磁得到的大磁极上且与其同性,对大磁极极性不产生影响,主磁极10部分覆盖在前一次充磁得到的大磁极上且与其异性,被覆盖的部分因被再次充磁而改性,从而前一次充磁得到的大磁极经覆盖充磁后变成宽度与磁栅尺步进距离相同的标准磁极。
在这里,充磁头每次充磁后需要断开通电电流,等待磁栅尺移动到下一个充磁位后再反向通电。
步骤D、多次重复步骤C,每次步进后充磁头改变一次通电方向,得到N、S标准磁极连续重复排列的磁栅尺成品。
为了更好地说明本发明的工作方式,可以参考图1至图4的连续4次充磁过程,设标准极宽为1个单位量,充磁头主磁极10宽度为1.2个单位量,主磁极10的磁极边界到副磁极外侧磁极边界的距离为0.3个单位量,斜线代表N极,网格线代表S极,以下仅将主磁极10以及其充磁后的磁栅尺区域进行N、S标注,副磁极不做标注,充磁头上主磁极10与副磁极之间设有无磁区,无磁区宽度与主、副磁极相比可以忽略,为了突出无磁区存在的事实,在图1至图4解释本发明的工作方式时,对充磁头的无磁区宽度作放大处理,同时忽略磁栅尺上相邻两极之间的无磁区。
第一次充磁时,磁栅尺上得到1个大磁极N和两个小磁极S,见图1,磁栅尺下方的刻度始终与第一个大磁极N的边界对齐;第一次充磁后磁栅尺步进1个单位量,进行第二次充磁,充磁头各极反转,新的主磁极10此时为S极,且与前一次形成的大磁极N部分重合,因此,充磁后磁栅尺上形成一个标准磁极N以及一个大磁极S,见图2;第二次充磁后磁栅尺再步进1个单位量,进行第三次充磁,充磁头各极反转,新的主磁极10此时为N极,且与前一次形成的大磁极S部分重合,因此,充磁后磁栅尺上形成一个标准磁极S以及一个大磁极N,见图3;第三次充磁后磁栅尺再步进1个单位量,进行第四次充磁,充磁头各极反转,新的主磁极10此时为S极,且与前一次形成的大磁极N部分重合,因此,充磁后磁栅尺上形成一个标准磁极N以及一个大磁极S,见图4,图4中已经可见磁栅尺形成有N-S-N标准磁极交替排列的磁极,再重复磁栅尺的步进以及充磁头各极反转充磁,最后能得到N-S多极交替排列的磁栅尺成品。
当待充磁磁栅尺进行连续充磁加工时,旋转编码器反馈磁栅尺走过的距离,每走过一个标准极宽的距离,控制系统发出一个充磁指令,控制充磁头的通电电流方向,保证任意相邻两次充磁加工时充磁头的通电电流方向是相反的,可保证每次充磁时充磁头极性反转,同时需要保证通电电流的大小是一样的,使充磁得到的标准磁极一致度更高。
随着待充磁磁栅尺的多次步进,旋转编码器记录磁栅尺走过的总距离,当磁栅尺的步进次数与标准极宽的乘积值与磁栅尺走过的总距离值的差值大于标准极宽×0.02时,控制系统控制驱动电机,使磁栅尺下次步进的距离为(1±0.02)×标准极宽,该做法是因为虽然磁栅尺每次步进的距离为一个标准极宽值,但事实上仍然存在一定的误差,这个误差值理论上是极小的,但当多次累积后该误差值就不能忽视了,会影响到磁栅尺的精度,因此,当误差值累积到一定程度后,需要对磁栅尺步进距离进行微调,从而消除连续充磁后累积的误差,提高磁栅尺的精度。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种磁栅尺的覆盖式充磁方法
- 一种编码不规则磁栅尺的编码充磁方法