一种侦察巡检机器人用火源距离和地图方位的探测方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及侦察巡检机器人技术领域,具体是一种侦察巡检机器人用火源距离和地图方位的探测方法。
背景技术
火灾严重影响人民的生命安全和财产安全,火源感知、火情预测和火灾扑救仍然是当今消防领域的难题。为了提前发现火源,及时处理火情,侦察巡检机器人的研究逐步受到人们的广泛关注。现有侦察巡检机器人通常采用小车结构,车身上通过云台设置各种探测模块,在小车移动过程中,云台上的探测模块转动对周侧环境进行巡检,当探测到火情时,发出警报并通过定位模块将位置信息发送至中控室进行处理。然而,在大面积侦察巡检作业中,这种巡检定位火源的方式存在以下弊端:不能准确探测火源的位置,从而不能及时火情控制。
公布号为CN 110860057 A的专利文献公开了一种消防侦察机器人及侦察方法。该消防侦察机器人的激光雷达安装于履带底盘的前端;安装立柱固定于履带底盘的后端;双目视觉摄像头固定于安装立柱上,且摄像头拍摄方向为履带底盘的前方;热红外成像及可见光云台固定于安装立柱的顶端;射流水炮固定于履带底盘上,且射流水炮的供水口位于履带底盘的后方;定位模块和工控机固定于履带底盘的内部,定位模块的输出端、双目视觉摄像头的输出端、激光雷达的输出端、热红外成像及可见光云台的输出端均与工控机的输入端连接;工控机用于控制履带移动和射流水炮的发射状态。所述侦察方法包括:获取红外热成像图像和摄像头图像;所述红外热成像图像为热红外成像及可见光云台检测的图像,所述摄像头图像为双目视觉摄像头拍摄的图像;根据所述红外热成像图像和摄像头图像判断当前视场范围内是否出现火源;当当前视场范围内出现火源时,获取火源的相对位置;根据所述火源的相对位置,采用改进的A*算法,规划全局路径;根据激光雷达的测距信息,采用DWA算法,规划局部避障路径;控制所述消防侦察机器人按照规划好的全局路径和局部避障路径移动至所述火源处,进行灭火。但是,该发明采用激光雷达进行测距,受障碍物影响较大,从而不能准确探测火源距离和方位。
公告号为CN 105160799 B的专利文献公开了一种基于红外热成像裸数据的火情与热源探测方法,包括如下步骤,初始化热像仪内部数据以及服务器内部数据,并使得热像仪与服务器之间建立连接关系;通过服务器循环获取当前时刻热像仪生成的热图像,并将该热图像的每个像元点的环温数据保存于一文件夹中;调取文件夹中的环温数据并进行相应的解码,以获取每个像元点的环温值,并将所有像元点的环温值数组化;当热像仪生成的是室内近距离场景的热图像,则对数组化的环温值进行静态阈值判定以确定着火点。本发明还涉及一种基于红外热成像裸数据的火情与热源探测装置。该发明能够使得裸数据效用最大化,并能将其应用到各个行业中,即能够提高工业和民用领域对火险预警与监测准确性。但是,该发明同样无法准确确定火源的距离和方位,无法解决上述技术问题。
发明内容
有鉴于此,本发明针对现有技术的不足,提供的一种能够准确确定火源位置的侦察巡检机器人用火源距离和地图方位的探测方法。
为解决上述技术问题,本发明所采取的技术方案是:一种侦察巡检机器人用火源距离和地图方位的探测方法,包括以下步骤:
步骤1:巡检机器人在开始执行巡检任务时,依靠自身安装的导航系统记录出发时的自身位置航行信息,确定自身的姿态位置;
步骤2:巡检机器人按照给定的巡检路线自主开始巡检,并在巡检的过程中开启三合一火焰探测器,对是否出现火源进行判定;
步骤3:当装载在巡检机器人车身上的三合一火焰探测器第一次检测到火焰信号后,自动发出报警信息,并记录火源中心点在地图中的位置和此时导航系统中巡检机器人的坐标信息,以及第一次发现火源时三合一火焰探测器和巡检机器人之间的方向角;
步骤4:巡检机器人继续向前行驶,当三合一火焰探测器第二次检测到火焰信号后,自动发出报警信息,并记录火源中心点在地图中的位置,此时导航系统中巡检机器人的坐标信息,第二次发现火源时三合一火焰探测器和巡检机器人之间的方向角,以及第一次发现火源和第二次发现火源时巡检机器人行驶的里程数;
步骤5:火源中心位置和第一次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置以及第二次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置,三个坐标信息点构成了一个三角形,利用第一次发现火源时三合一火焰探测器和巡检机器人之间的方向角和第二次发现火源时三合一火焰探测器和巡检机器人之间的方向角得到三角形的两个底角角度,并且利用两次发现火源时巡检机器人的导航系统的里程计得到行驶距离,即三角形底边的长度;
步骤6:根据步骤5中三角形的两个底角角度和底边长度,计算出三角形的两个斜边长度,即火源中心位置和第一次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置之间的距离,以及火源中心位置和第二次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置之间的距离。
进一步的,步骤2中,所述三合一火焰探测器感知周围环境的烟雾、温度、光感。
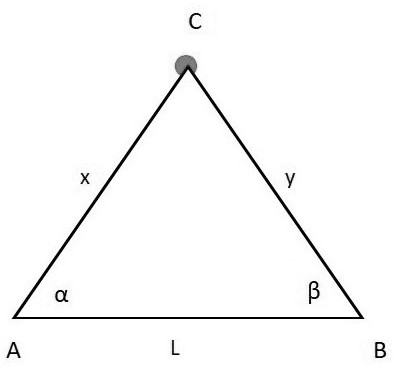
进一步的,步骤6中,根据第一次发现火源时巡检机器人的相对位置信息A和第二次发现火源时巡检机器人的相对位置信息B和导航系统中里程计得到的两次发现火源时巡检机器人行驶距离L,以及第一次发现火源时巡检机器人的相对位置信息A与火源中心C的位置得到方位角∠BAC,第二次发现火源时巡检机器人的相对位置信息B与火源中心C的位置得到方位角∠ABC,求出两次机器人与火源的相对距离AB和AC:
AC=Lsinβ/sin(α+β)
BC=Lsinα/sin(α+β)
式中,α为方位角∠BAC的角度,β为方位角∠ABC的角度。
进一步的,第二次发现火源时巡检机器人的相对位置信息B与火源中心C的位置得到方位角∠ABC,此时根据导航系统中的导航信息,结合巡检机器人的位置姿态判断出火源的方位角度,然后通过数字传输天线将距离信息和方位信息传输给中央控制室进行调度处理。
进一步的,根据所述三合一火焰探测器探测到的信息,得到第二次火焰探测器探测到火源位置时,巡检机器人与火源的距离和火源相对巡检机器人的方位信息,并将方位信息在空间地图中进行标定,通过巡检摄像头把图像信息和数字信息传输给中央控制室,由中央控制器启动灭火程序。
本领域的技术人员使用巡检机器人进行火源探测时,为了提高探测准确性通常想到是对探测元件的改进,具体来说,通过提高探测元件,如红外传感器、红外镜头的感应精度,优化探测区间等来实现火源的准确探测,如公布号为CN 108389352 A专利文献公开的一种火源探测方法及装置,属于光电传感器技术领域。所述火源探测方法首先由处理组件控制温度传感元件将广角红外镜头采集的较大区域内的区域温度信号,然后所述处理组件基于所述区域温度信号控制长焦红外镜头采集待定火源温度信号,所述处理组件再基于所述待定火源温度信号生成表征是否发现火源的火源判断信号。所述火源探测方法通过控制所述广角红外镜头发现疑似火源,再通过长焦红外镜头对所述疑似火源进行具体探测,提升了火源探测的精确度,同时通过相应图像处理方法降低了火源探测设备的硬件成本。又如公布号为CN 110860057 A专利文献公开的一种消防侦察机器人及侦察方法。该消防侦察机器人的激光雷达安装于履带底盘的前端;安装立柱固定于履带底盘的后端;双目视觉摄像头固定于安装立柱上,且摄像头拍摄方向为履带底盘的前方;热红外成像及可见光云台固定于安装立柱的顶端;射流水炮固定于履带底盘上,且射流水炮的供水口位于履带底盘的后方;定位模块和工控机固定于履带底盘的内部,定位模块的输出端、双目视觉摄像头的输出端、激光雷达的输出端、热红外成像及可见光云台的输出端均与工控机的输入端连接;工控机用于控制履带移动和射流水炮的发射状态。这两项专利文献均通过火源探测元件的布置和使用方式的优化来提高火源探测的精度。由此可知,本申请通过在大面积侦察巡检作业中采用二次探测法获取火源与巡检机器人的距离信息以及方位信息,实现火源精确定位的技术方案,对本领域技术人员来说是不容易想到的。
与现有技术相比,本发明的有益效果如下:
本发明侦察巡检机器人用火源距离和地图方位的探测方法,用于侦察巡检机器人的导航系统和火焰探测系统,通过计算机器人的行驶里程,读取发现火源时机器人的当前位置和姿态,经过两次的测量从而判断出,机器人和火源之间的距离,并根据出发时的位置姿态和发现火源时自身的位置姿态判断出火源在地图中的方位信息,并在构建的地图上进行标定,本发明为侦察巡检机器人在巡检侦察的过程中可以更好的自身优势,在大面积侦察巡检作业中,为消防救援力量提供了一种更为直观量化的参数信息以便及时高效的控制消灭火源。
本发明侦察巡检机器人用火源距离和地图方位的探测方法,三合一火焰探测器感知周围环境的烟雾、温度、光感来判定火源发生,火源中心位置C和第一次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置A以及第二次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置B,三个坐标信息点构成了一个三角形,通过两次探测火源时三合一火焰探测器和巡检机器人之间的方向角的记录得到三角形两底角,并且通过导航系统获得三角形底边长度,从而准确计算出巡检机器人与火源之间的距离,以及火源相对巡检机器人的方位,便于中控室及时发现并控制消灭火源。
附图说明
图1是本发明的原理图。
具体实施方式
为了更好地理解本发明,下面结合实施例进一步清楚阐述本发明的内容,但本发明的保护内容不仅仅局限于下面的实施例。在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本发明可以无需一个或多个这些细节而得以实施。
实施例一
一种侦察巡检机器人用火源距离和地图方位的探测方法,包括以下步骤:
步骤1:巡检机器人在开始执行巡检任务时,依靠自身安装的导航系统记录出发时的自身位置航行信息,确定自身的姿态位置;
步骤2:巡检机器人按照给定的巡检路线自主开始巡检,并在巡检的过程中开启三合一火焰探测器,所述三合一火焰探测器感知周围环境的烟雾、温度、光感,对是否出现火源进行判定;
步骤3:当装载在巡检机器人车身上的三合一火焰探测器第一次检测到火焰信号后,自动发出报警信息,并记录火源中心点在地图中的位置和此时导航系统中巡检机器人的坐标信息,以及第一次发现火源时三合一火焰探测器和巡检机器人之间的方向角;
步骤4:巡检机器人继续向前行驶,当三合一火焰探测器第二次检测到火焰信号后,自动发出报警信息,并记录火源中心点在地图中的位置,此时导航系统中巡检机器人的坐标信息,第二次发现火源时三合一火焰探测器和巡检机器人之间的方向角,以及第一次发现火源和第二次发现火源时巡检机器人行驶的里程数;
步骤5:火源中心位置和第一次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置以及第二次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置,三个坐标信息点构成了一个三角形,利用第一次发现火源时三合一火焰探测器和巡检机器人之间的方向角和第二次发现火源时三合一火焰探测器和巡检机器人之间的方向角得到三角形的两个底角角度,并且利用两次发现火源时巡检机器人的导航系统的里程计得到行驶距离,即三角形底边的长度;
步骤6:根据步骤5中三角形的两个底角角度和底边长度,计算出三角形的两个斜边长度,即火源中心位置和第一次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置之间的距离,以及火源中心位置和第二次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置之间的距离。
如图1所示,步骤6中,根据第一次发现火源时巡检机器人的相对位置信息A和第二次发现火源时巡检机器人的相对位置信息B和导航系统中里程计得到的两次发现火源时巡检机器人行驶距离L,以及第一次发现火源时巡检机器人的相对位置信息A与火源中心C的位置得到方位角∠BAC,第二次发现火源时巡检机器人的相对位置信息B与火源中心C的位置得到方位角∠ABC,求出两次机器人与火源的相对距离AB和AC:
AC=Lsinβ/sin(α+β)
BC=Lsinα/sin(α+β)
式中,α为方位角∠BAC的角度,β为方位角∠ABC的角度。
AC、BC的计算方法如下:
假设AC为x,BC为y,AB边的高为h,则
h= xsinα= ysinβ (式1)
xcosα+ ycosβ= L (式2)
结合式1、式2,可知
y =xsinα/ sinβ
xcosα+ xsinαcosβ/ sinβ= L
即x(cosαsinβ+sinαcosβ)/ sinβ= L
x= Lsinβ/sin(α+β)
y=Lsinα/sin(α+β)
本发明实施例侦察巡检机器人用火源距离和地图方位的探测方法,三合一火焰探测器感知周围环境的烟雾、温度、光感来判定火源发生,火源中心位置C和第一次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置A以及第二次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置B,三个坐标信息点构成了一个三角形,通过两次探测火源时三合一火焰探测器和巡检机器人之间的方向角的记录得到三角形两底角,并且通过导航系统获得三角形底边长度,从而准确计算出巡检机器人与火源之间的距离,以及火源相对巡检机器人的方位,便于中控室及时发现并控制消灭火源。
实施例二
一种侦察巡检机器人用火源距离和地图方位的探测方法,包括以下步骤:
步骤1:巡检机器人在开始执行巡检任务时,依靠自身安装的导航系统记录出发时的自身位置航行信息,确定自身的姿态位置;
步骤2:巡检机器人按照给定的巡检路线自主开始巡检,并在巡检的过程中开启三合一火焰探测器,所述三合一火焰探测器感知周围环境的烟雾、温度、光感,对是否出现火源进行判定;
步骤3:当装载在巡检机器人车身上的三合一火焰探测器第一次检测到火焰信号后,自动发出报警信息,并记录火源中心点在地图中的位置和此时导航系统中巡检机器人的坐标信息,以及第一次发现火源时三合一火焰探测器和巡检机器人之间的方向角;
步骤4:巡检机器人继续向前行驶,当三合一火焰探测器第二次检测到火焰信号后,自动发出报警信息,并记录火源中心点在地图中的位置,此时导航系统中巡检机器人的坐标信息,第二次发现火源时三合一火焰探测器和巡检机器人之间的方向角,以及第一次发现火源和第二次发现火源时巡检机器人行驶的里程数;
步骤5:火源中心位置和第一次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置以及第二次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置,三个坐标信息点构成了一个三角形,利用第一次发现火源时三合一火焰探测器和巡检机器人之间的方向角和第二次发现火源时三合一火焰探测器和巡检机器人之间的方向角得到三角形的两个底角角度,并且利用两次发现火源时巡检机器人的导航系统的里程计得到行驶距离,即三角形底边的长度;
步骤6:根据步骤5中三角形的两个底角角度和底边长度,计算出三角形的两个斜边长度,即火源中心位置和第一次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置之间的距离,以及火源中心位置和第二次三合一火焰探测器探测到火源位置时巡检机器人的坐标位置之间的距离。
步骤6中,根据第一次发现火源时巡检机器人的相对位置信息A和第二次发现火源时巡检机器人的相对位置信息B和导航系统中里程计得到的两次发现火源时巡检机器人行驶距离L,以及第一次发现火源时巡检机器人的相对位置信息A与火源中心C的位置得到方位角∠BAC,第二次发现火源时巡检机器人的相对位置信息B与火源中心C的位置得到方位角∠ABC,求出两次机器人与火源的相对距离AB和AC:
AC=Lsinβ/sin(α+β)
BC=Lsinα/sin(α+β)
式中,α为方位角∠BAC的角度,β为方位角∠ABC的角度。
本发明实施例侦察巡检机器人用火源距离和地图方位的探测方法,与实施例一的不同之处在于:
第二次发现火源时巡检机器人的相对位置信息B与火源中心C的位置得到方位角∠ABC,此时根据导航系统中的导航信息,结合巡检机器人的位置姿态判断出火源的方位角度,即南偏西β度(以巡检机器人移动方向为北向),然后通过数字传输天线将距离信息和方位信息传输给中央控制室进行调度处理。
根据所述三合一火焰探测器探测到的信息,得到第二次火焰探测器探测到火源位置时,巡检机器人与火源的距离和火源相对巡检机器人的方位信息,并将方位信息在空间地图中进行标定,通过巡检摄像头把图像信息和数字信息传输给中央控制室,由中央控制器启动灭火程序。
本发明实施例侦察巡检机器人用火源距离和地图方位的探测方法,用于侦察巡检机器人的导航系统和火焰探测系统,通过计算机器人的行驶里程,读取发现火源时机器人的当前位置和姿态,经过两次的测量从而判断出,机器人和火源之间的距离,并根据出发时的位置姿态和发现火源时自身的位置姿态判断出火源在地图中的方位信息,并在构建的地图上进行标定,本发明为侦察巡检机器人在巡检侦察的过程中可以更好的自身优势,在大面积侦察巡检作业中,为消防救援力量提供了一种更为直观量化的参数信息以便及时高效的控制消灭火源。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其他修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
- 一种侦察巡检机器人用火源距离和地图方位的探测方法
- 一种先遣侦察及地图构建机器人