一种基于直反射三光路激光外差干涉渐开线样板测量的光学非线性误差补偿方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及一种光学非线性误差补偿方法,特别涉及一种基于直反射三光路激光外差干涉渐开线样板测量的光学非线性误差补偿方法,属于精密测量领域。
背景技术
齿轮作为一种应用最为广泛的基础部件,是制造业高端装备的关键基础部件,是我国现代工程技术应用不可或缺的一部分,在国民经济及国防建设中起着重要作用。2016年我国齿轮行业总产值达到2300多亿元,位居世界第一位。
随着关键装备对齿轮使用要求的不断提高以及齿轮加工工艺水平的快速提升,齿轮的精度有了大幅提高。评定及控制齿轮质量的关键是齿轮测量仪器的精度。为了实现齿轮的精度控制,高精度齿轮测量仪器的测量准确性保证非常重要。齿轮测量仪器的每项指标在测量齿轮之前都要进行校准,每个单项指标调好后进行综合检验,即用齿轮样板来校准齿轮测量仪器的综合误差,不仅提高了齿轮测量仪器的使用精度,同时保证量值统一。
激光干涉测量技术具有测量精度高(纳米量级)、溯源性强、重复性好等特点。激光外差干涉技术的特点是利用载波技术将被测物理量的信息转换成调频或调相信号,光电探测器接收到的干涉信号是交流信号,信噪比高,抗干扰能力强,易于实现高分辨率和动态实时的测量。因此将激光外差干涉技术应用于渐开线样板测量当中,针对双基圆盘式渐开线样板的高精度标定方法进行深入研究。
而采用激光外差干涉测量会导致光学系统中出现周期性非线性误差,影响测量结果准确性。德国联邦物理技术研究院提出一种通过调整光路补偿非线性误差的方法,该方法将测量信号的测量臂和参考臂返回的信号进行求和来减小误差。2000年,美国NIST提出的空间分离式激光干涉测量,该方法从光源出分离双拼激光束,避免不同频率的激光发生频率混叠。2002年,由韩国科学和标准研究局提出了一种椭圆拟合法进行非线性误差补偿,该方法通过算法处理将非线性误差补偿到亚纳米量级。2020年,由我国哈尔滨工业大学谭久彬院士团队提出了虚反射产生的非线性误差的补偿方法,可以将非线性误差减小到数十皮米量级。
本发明基于直反射三光路激光外差干涉渐开线样板测量系统进行深入研究,设计了一种基于该系统的光学非线性误差补偿方法,根据连续小波变换原理和最小二乘非线性拟合方法对非线性误差一次谐波和二次谐波进行补偿,对测量结果的精度提高有着重要作用。
发明内容
北京工业大学申请“基于激光外差干涉的双基圆盘式渐开线样板测量系统(申请号/专利号:201810704461.5)”的发明专利,设计了基于直反射三光路激光外差干涉的双基圆盘式渐开线样板测量光学系统,将激光外差干涉技术应用在双基圆盘式渐开线样板的测量中,从而实现高分辨率和动态实时的测量。2020年4月20日,同样已由北京工业大学提出申请,发布了题为“一种基于直反射三光路激光外差干涉的渐开线样板测量方法(申请号/专利号:202010193248.X)”的专利,对利用该测量系统的测量方法以及误差模型进行了说明,该专利目前已经进入实审阶段。2020年9月25日,北京工业大学提出申请,发布了题为“一种基于直反射三光路激光外差干涉渐开线样板测量的光学系统方法(申请号/专利号:202010741134.4)”的专利,提出一种针对光学系统的分析方法,对光路的研究具有指导意义。
直反射三光路激光外差干涉样板的测量方法中使用双频激光光源,理想情况下,光源通过偏振出射两束正交的线偏光p光、s光。在三条测量光路中,由于偏振光的正交,只有一个频率进入每条路径(测量臂和参考臂)。通过将每条路径反射回来的信号重新组合获得干涉信号,将测量光路信号与参考光路信号进行比较,得到位移信息。在实际应用中,由于激光束的偏振椭圆极化、激光束的非正交、偏振分光镜放置误差、偏振分光镜分光性能非理想等原因,出现不理想的频率混频,导致了周期性的光学非线性误差。研究光学非线性误差的补偿方法对测量精度的提升至关重要。
本发明分别根据连续小波变换原理和最小二乘非线性拟合方法对非线性误差一次谐波和二次谐波进行补偿,提供了一种基于直反射三光路激光外差干涉渐开线样板测量的光学非线性误差补偿方法。
本发明的研究对双频干涉产生的周期性光学非线性误差进行了有效的补偿,能够显著提升基于直反射三光路激光外差干涉渐开线样板测量的精度。
一种基于直反射三光路激光外差干涉的渐开线样板测量光学系统分析方法,包括下述步骤:
步骤一:小波函数选用。
连续小波变换根据小波尺度和时间周期显示了频率内容和信号之间的关系,比傅里叶变换提供更多的信息。根据检测方法的不同,有许多类型的小波函数可用。常用的小波有Haar,Daubechies,Meyer,Mexican Hat和Morlet。本方法选用Morlet小波,因为该小波变换后,在时域和频域均有较好的分辨率。
复Morlet小波由复指数乘以高斯窗口:
其中,ψ*(t)表示关于时间t的母小波函数,f
步骤二:周期性非线性误差模型简化。
将周期性非线性误差建模为纯正弦波的叠加。直反射三光路激光外差干涉测量系统中含有一阶和二阶非线性误差,可以表示为:
E
其中,t为时间,A
步骤三:进行离散连续小波变换。
用直反射三光路激光外差干涉测量系统对基圆盘式样板进行测量,得到的数据是离散数据,用X[1...N],存储原始非线性误差模型离散化的数据,N为数据点总个数。对非线性误差函数进行离散连续小波变换:
其中,x(n)为第n个离散数据点,对应着产生位移的时间信息,ψ*为母小波,M为信号中总数据点数,Δt为采样时间。
步骤四:建立小波系数矩阵中小波系数的模量和相位模型。
改变复Morlet小波的位移参数和尺度参数生成小波族,得到的小波系数矩阵为沿尺度方向和时间方向的二维复数矩阵。
小波系数矩阵中小波系数的模量可计算为:
abs(n,s)=|Ws(n,s)| (4)
相位可计算为:
其中,Im和Re分别表示小波系数的虚部和实部。
步骤五:小波脊线提取和分析。
连续小波变换的模值集中在一系列被称为脊线的曲线附近,脊线上分布的特征参数与原始信号本身具有很强的相似性,可以用来描述原始信号的重要特征。小波脊线是每个时刻t下,小波系数的模值取极大值的点的集合。
当脊线位置上小波系数模量最大时,此处对应的尺度S
步骤六:建立基于连续小波变换的非线性误差重构模型。
非线性误差重构模型表示为:
E
其中,r
步骤七:求光学非线性误差一次谐波和二次谐波的振幅A
取尺度参数s为一阶非线性误差和二阶非线性误差对应的尺度S
实际中,非线性二次谐波的振幅求解过程中,最优的代入方程的点不像一次谐波容易确认,因此导致二阶振幅会有较大的偏差,因此需要对非线性误差二次谐波进行进一步的算法补偿。
步骤八:设定非线性误差二次谐波曲线拟合函数一般形式。
根据非线性误差函数的推导,已知非线性误差函数的形式,设定非线性曲线拟合函数一般形式:
F(x,xdata)=var(1)·sin(var(2)·x+var(3))+var(4) (8)
其中,xdata对应非线性误差曲线的横坐标,即位移参数。x为拟合系数。var(1)、var(2)、var(3)、var(4)均是决定非线性曲线拟合曲线特征的参数,受拟合系数x计算结果的影响。
步骤九:基于最小二乘迭代拟合非线性曲线。
在最小二乘意义上解决非线性曲线拟合问题,迭代找出能解出问题的系数x,使得以下成立:
给定输入数据xdata,观察输出ydata,其中,xdata和ydata是矩阵或向量,F(x,xdata)是一个与ydata大小相同的矩阵值函数或向量值函数。
F(x,xdata)接收输入x和xdata,并返回函数值F的向量(或矩阵)。
得到非线性曲线拟合数据阵列:
其中,n等于非线性误差函数的数据点个数。
步骤十:非线性误差补偿。
用原始非线性误差模型离散化的数据X[1...N]先后减去基于连续小波变换得到重构的非线性误差一次谐波阵列和基于最小二乘非线性曲线拟合得到的非线性误差二次谐波阵列,得到补偿后离散数据:
E
附图说明
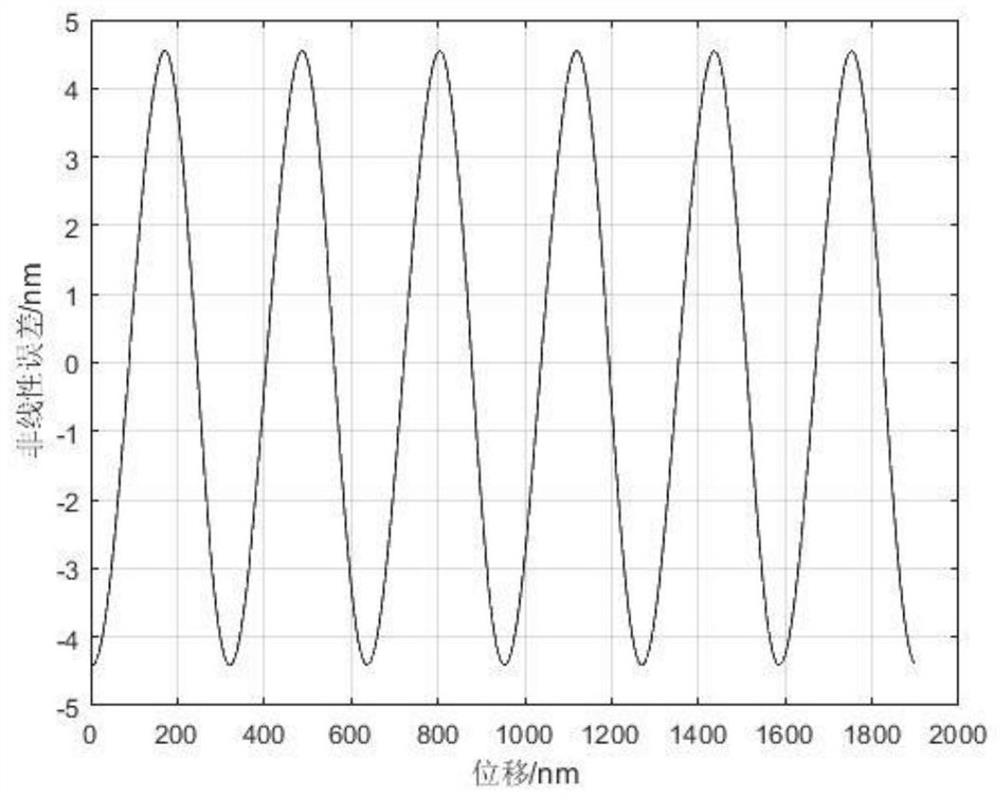
图1为原始非线性误差曲线。
图2为时间-尺度-小波系数模值曲面图。
图3为小波脊线提取示意图。
图4为补偿效果仿真图。
具体实施方式
下面对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
使用MATLAB软件,对本发明进行仿真。
步骤一:小波函数选用。
连续小波变换根据小波尺度和时间周期显示了频率内容和信号之间的关系,比傅里叶变换提供更多的信息。根据检测方法的不同,有许多类型的小波函数可用。常用的小波有Haar,Daubechies,Meyer,Mexican Hat和Morlet。本方法选用Morlet小波,因为该小波变换后,在时域和频域均有较好的分辨率。
复Morlet小波由复指数乘以高斯窗口:
其中,ψ*(t)表示关于时间t的母小波函数,f
MATLAB仿真中选小波参数选用“cmor0.5-1”,其中,0.5为母小波带宽参数,1为母小波中心频率参数。
步骤二:周期性非线性误差模型简化。
将周期性非线性误差建模为纯正弦波的叠加。直反射三光路激光外差干涉测量系统中含有一阶和二阶非线性误差,可以表示为:
E
其中,t为时间,A
步骤三:进行离散连续小波变换。
用MATLAB仿真原始非线性误差曲线,如图1所示,该曲线包含非线性误差一次谐波和非线性误差二次谐波,非线性误差达到4.5445nm。
用直反射三光路激光外差干涉测量系统对基圆盘式样板进行测量,得到的数据是离散数据,用X[1...N],存储原始非线性误差模型离散化的数据,N为数据点总个数。对非线性误差函数进行离散连续小波变换:
其中,x(n)为第n个离散数据点,对应着产生位移的时间信息,ψ*为母小波,M为信号中总数据点数,Δt为采样时间。
步骤四:建立小波系数矩阵中小波系数的模量和相位模型。
改变复Morlet小波的位移参数和尺度参数生成小波族,得到的小波系数矩阵为沿尺度方向和时间方向的二维复数矩阵。
小波系数矩阵中小波系数的模量可计算为:
abs(n,s)=|Ws(n,s)| (4)
相位可计算为:
其中,Im和Re分别表示小波系数的虚部和实部。
由此,不同的时间参数、尺度参数和小波系数的模值可以构建一个三维曲面,如图2所示,曲面中的高点代表小波系数模值越大。小波系数模量越大,代表此处的时间参数和尺度参数构成的子小波与非线性误差曲线的相关性最好。
步骤五:小波脊线提取和分析。
连续小波变换的模值集中在一系列被称为脊线的曲线附近,脊线上分布的特征参数与原始信号本身具有很强的相似性,可以用来描述原始信号的重要特征。小波脊线是每个时刻t下,小波系数的模值取极大值的点的集合。用MATLAB软件提取小波脊线如图3所示。
当脊线位置上小波系数模量最大时,此处对应的尺度S
步骤六:建立基于连续小波变换的非线性误差重构模型。
非线性误差重构模型表示为:
E
其中,r
步骤七:求光学非线性误差一次谐波和二次谐波的振幅A
振幅A
实际中,非线性二次谐波的振幅求解过程中,最优的代入方程的点不像一次谐波容易确认,因此导致二阶振幅会有较大的偏差,因此需要对非线性误差二次谐波进行进一步的算法补偿。
步骤八:设定非线性误差二次谐波曲线拟合函数一般形式。
根据非线性误差函数的推导,已知非线性误差函数的形式,设定非线性曲线拟合函数一般形式:
F(x,xdata)=var(1)·sin(var(2)·x+var(3))+var(4) (8)
其中,xdata对应非线性误差曲线的横坐标,即位移参数。x为拟合系数。var(1)、var(2)、var(3)、var(4)均是决定非线性曲线拟合曲线特征的参数,受拟合系数x计算结果的影响。
初始设置:
步骤九:基于最小二乘迭代拟合非线性曲线。
在最小二乘意义上解决非线性曲线拟合问题,迭代找出能解出问题的系数x,使得以下成立:
给定输入数据xdata,观察输出ydata,其中,xdata和ydata是矩阵或向量,F(x,xdata)是一个与ydata大小相同的矩阵值函数或向量值函数。
设定x初值x
得到非线性曲线拟合数据阵列:
其中,n等于非线性误差函数的数据点个数。
步骤十:非线性误差补偿。
用原始非线性误差模型离散化的数据X[1...N]先后减去基于连续小波变换得到重构的非线性误差一次谐波阵列和基于最小二乘非线性曲线拟合得到的非线性误差二次谐波阵列,得到补偿后离散数据:
E
如图4所示,为基于MATLAB软件对补偿结果的仿真,非线性误差被补偿到了0.0610nm。本发明方法对基于直反射三光路激光外差干涉渐开线样板测量的光学非线性误差补偿起到了很好的效果。
- 一种基于直反射三光路激光外差干涉渐开线样板测量的光学非线性误差补偿方法
- 一种基于直反射三光路激光外差干涉渐开线样板测量的光学系统方法