车辆控制装置
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及构成为在判定为驾驶员处于异常状态的情况下使车辆停止的车辆控制装置。
背景技术
以往,提出了一种在判定为驾驶员处于异常状态的情况下强制使车辆停止的装置(以下,称为“现有装置”)(例如参照日本特开2019-023831)。在此,异常状态意味着驾驶员失去驾驶车辆的能力的状态,例如包括困倦驾驶状态以及身心机能停止状态等。
现有装置一方面在车辆停止以后执行将车辆保持为停止状态的停止保持控制。再者,现有装置在执行停止保持控制期间,当驾驶员对用于驾驶车辆的操作件(例如加速踏板)进行了操作的情况下,判定为驾驶员的状态从异常状态恢复到正常状态,将停止保持控制解除。
发明内容
在停止保持控制的执行期间,会有救助者对驾驶员进行救助的情况。这时,例如会有驾驶员的脚碰到加速踏板的情况。在该情况下,现有装置将停止保持控制解除。因此,在现有装置中,存在尽管驾驶员正在被救助但车辆却开始移动(起步)的可能性。
本发明是为了解决上述问题而做出的。即,本发明的目的之一是提供能够降低在救助驾驶员期间车辆开始移动的可能性的车辆控制装置。
本发明的车辆控制装置具备:
传感器(11),其取得关于驾驶操作件的操作量的信息,所述驾驶操作件由车辆的驾驶员为了驾驶所述车辆而进行操作,所述驾驶操作件至少包括为了使所述车辆加速而进行操作的加速操作件(11a);以及
控制装置(10),其构成为,
基于关于所述驾驶操作件的所述操作量的所述信息,在所述车辆的行驶期间反复判定所述驾驶员是否处于失去了驾驶所述车辆的能力的异常状态;
在连续判定为所述驾驶员处于所述异常状态的情况下,执行对所述车辆施加制动力而使所述车辆停止的停止控制(步骤505、步骤604);
在通过所述停止控制使所述车辆停止以后(步骤603:否),执行通过持续对所述车辆施加所述制动力而使所述车辆保持停止状态的停止保持控制(步骤701:是、步骤702),
所述控制装置构成为,在所述停止保持控制的执行期间,当第1条件成立时(步骤705:是),禁止解除所述停止保持控制,所述第1条件在所述加速操作件的所述操作量大于预定阈值时成立。
根据上述构成,在第1条件成立的情况下,禁止解除停止保持控制。因此,即使在救助者救助驾驶员时驾驶员的脚碰到加速操作件的情况下,也能够防止车辆开始移动。
在本发明的一个技术方案中,所述控制装置构成为,在所述停止保持控制的执行期间,当除所述第1条件成立(步骤705:是)之外第2条件也成立时(步骤901:是),禁止解除所述停止保持控制,所述第2条件在所述驾驶员当前正在被救助的或然性高时成立。
根据上述构成,当驾驶员正在被救助的或然性高时,禁止解除停止保持控制。
在本发明的一个技术方案中,所述控制装置构成为,即使在所述停止保持控制的执行期间所述第1条件成立的情况下(步骤705:是),当所述第2条件不成立并且进行了用于解除所述停止保持控制的预定的解除操作时(步骤901:否、且步骤706:是),也将所述停止保持控制解除(步骤707)。
在第2条件不成立的情况下,存在驾驶员的状态从异常状态恢复到正常状态且驾驶员为了立刻重新开始车辆的行驶而触碰加速操作件的可能性。根据上述构成,即使驾驶员碰到加速操作件,在第2条件不成立时,也能够通过驾驶员进行解除操作来解除停止保持控制。因此,能够反映驾驶员要重新开始驾驶的想法。
在本发明的一个技术方案中,所述控制装置构成为,当与所述驾驶员的座位对应的门为打开状态这一条件、和所述驾驶员的座位的安全带为解除状态这一条件中的至少一方成立时,判定为所述第2条件成立。
根据上述构成,能够根据与驾驶员的座位对应的门和/或驾驶员的座位的安全带的状态,判定驾驶员正在被救助的或然性的高低。
在一个以上的实施方式中,上述的控制装置也可以通过被编程用于执行本说明书中记述的一个以上的功能的微处理器来实施。在一个以上的实施方式中,控制装置也可以整体地或者部分地通过由专用于一个以上的应用程序的集成电路、即ASIC等构成的硬件来实施。在上述说明中,为了有助于本发明的理解,对于与后述的实施方式对应的发明构成,以写在括号内的方式添加了其在实施方式中使用的名称和/或标号。然而,本发明的各构成要素并非限定于由所述名称和/或标号规定的实施方式。
附图说明
以下,参照附图对本发明的示例性实施方式的特征、优点以及技术和产业意义进行说明,在附图中相同的标号表示相同的要素,并且其中:
图1是第1实施方式涉及的车辆控制装置(第1装置)的概略构成图。
图2是用于说明图1所示的车辆控制装置的工作(操作)的图。
图3是表示第1装置的驾驶辅助ECU的CPU(以下,简称为“CPU”)执行的“异常状态判定例程”的流程图。
图4是表示CPU执行的“第1模式控制例程”的流程图。
图5是表示CPU执行的“第2模式控制例程”的流程图。
图6是表示CPU执行的“第3模式控制例程”的流程图。
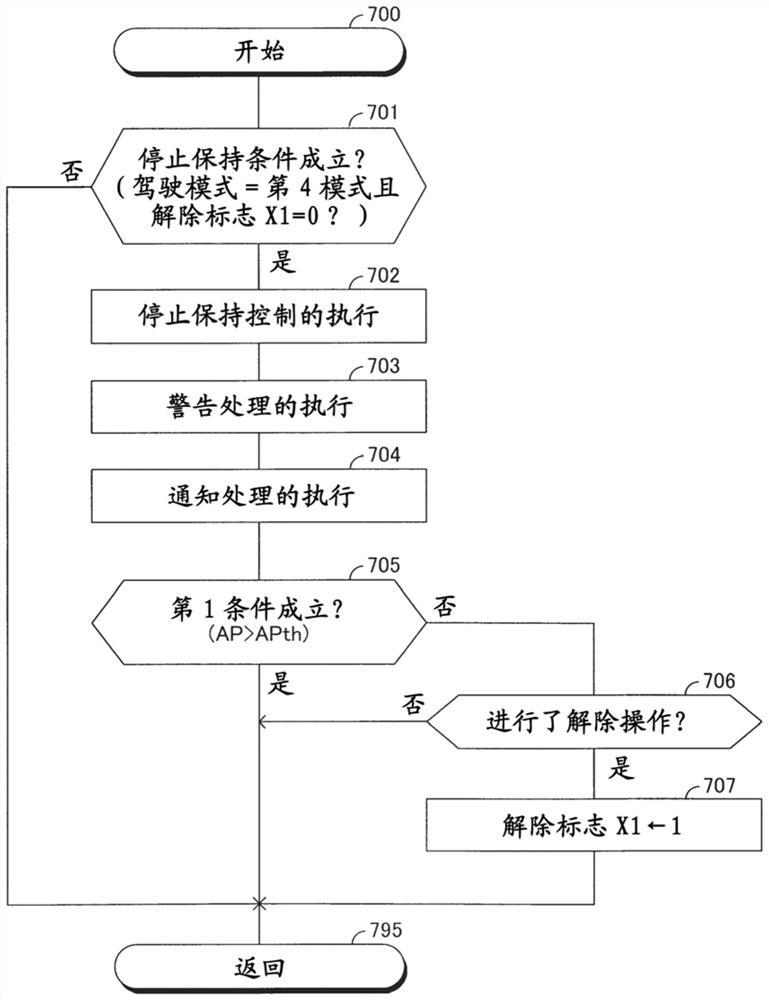
图7是表示CPU执行的“第4模式控制例程”的流程图。
图8是表示第1装置的变形例涉及的“第4模式控制例程”的流程图。
图9是表示第2实施方式涉及的车辆控制装置(第2装置)的CPU执行的“第4模式控制例程”的流程图。
具体实施方式
<第1实施方式>
如图1所示,第1实施方式涉及的车辆控制装置(以下,有时也称为“第1装置”)应用于车辆VA。车辆控制装置具备驾驶辅助ECU10、发动机ECU20、制动(brake)ECU30、电动泊车制动ECU(以下,称为“EPB-ECU”)40、转向(steering)ECU50、仪表(meter)ECU60、警报ECU70以及车身ECU80。
这些ECU是具备微型计算机作为主要构成部件的电子控制装置(ElectricControl Unit),经由CAN(Controller Area Network,控制器域网)100以相互能够发送并能够接收信息的方式连接。ECU10至80也可以若干个或者全部被合并为一个ECU。
在本说明书中,微型计算机包括CPU、ROM、RAM、非易失性存储器以及接口(I/F)等。CPU通过执行存储于ROM的指令(程序、例程)而实现各种功能。例如,驾驶辅助ECU10具备包括CPU10a、ROM10b、RAM10c、非易失性存储器10d以及接口(I/F)10e等的微型计算机。
驾驶辅助ECU10与后述的传感器以及开关连接,接收它们的检测信号或者输出信号。
加速踏板操作量传感器11检测加速踏板(加速操作件)11a的操作量AP,输出表示加速踏板操作量AP的信号。当驾驶员没有在操作加速踏板11a的情况下,加速踏板操作量AP为“0”。驾驶员将加速踏板11a踩下的量越大,则加速踏板操作量AP变得越大。
制动踏板操作量传感器12检测制动踏板(制动操作件)12a的操作量BP,输出表示制动踏板操作量BP的信号。当驾驶员没有在操作制动踏板12a的情况下,制动踏板操作量BP为“0”。驾驶员将制动踏板12a踩下的量越大,则制动踏板操作量BP变得越大。
转向转矩传感器13检测由驾驶员对方向盘SW的操作(转向操作)而作用于转向轴US的转向扭矩Tra,输出表示转向扭矩Tra的信号。当驾驶员没有在操作方向盘SW的情况下,转向扭矩Tra为“0”。再者,在使方向盘SW旋转到第1方向(左方向)的情况下转向扭矩Tra的值为正值,在使方向盘SW旋转到第2方向(右方向)的情况下转向扭矩Tra的值为负值。转向角传感器14检测车辆VA的转向角θ,输出表示该转向角θ的信号。车速传感器15检测车辆VA的行驶速度(以下,称为“车速”)SPD,输出表示该车速SPD的信号。
以下,由于加速踏板11a、制动踏板12a以及方向盘SW是由驾驶员为了驾驶车辆VA而进行操作的操作件,因此有时也将它们统称为“驾驶操作件”。
周围传感器16是检测车辆VA的周边状况的传感器。周围传感器16取得与车辆VA周围的道路(例如车辆VA正在行驶的行驶车道)有关的信息以及与道路上存在的立体物有关的信息。立体物例如包括行人、四轮车和两轮车等移动物体以及护栏和围栏等固定物体。以下,有时也将这些立体物称为“目标物”。周围传感器16具备雷达传感器16a以及摄像头(camera)传感器16b。
雷达传感器16a例如向车辆VA的周边区域发射毫米波段的电波(以下,称为“毫米波”),并接收由放射范围内存在的目标物反射的毫米波(即反射波)。雷达传感器16a判定有无目标物,并且计算表示车辆VA与目标物的相对关系的信息。表示车辆与目标物的相对关系的信息包含车辆VA与目标物的距离、目标物相对于车辆VA的方位(或者位置)以及目标物相对于车辆VA的相对速度等。将从雷达传感器16a获得的信息(包含表示车辆VA与目标物的相对关系的信息)称为“目标物信息”。
摄像头传感器16b拍摄车辆VA前方的风景而取得图像数据。摄像头传感器16b基于该图像数据,识别规定车辆VA正在行驶的行驶车道的多个车道标线(例如左白线以及右白线)。再者,摄像头传感器16b计算表示行驶车道的形状的参数(例如曲率)以及表示车辆VA与行驶车道的位置关系的参数等。表示车辆VA与行驶车道的位置关系的参数例如包括车辆VA的车宽方向的中心位置与左白线或者右白线上的任意位置之间的距离。将由摄像头传感器16b取得的信息称为“车道信息”。此外,摄像头传感器16b也可以构成为,基于图像数据,判定有无目标物,并计算目标物信息。
周围传感器16将包含“目标物信息以及车道信息”的与车辆的周边状况有关的信息作为“车辆周边信息”输出到驾驶辅助ECU10。
操作开关18设置于方向盘SW,包括由驾驶员在使驾驶辅助控制开始/结束时所操作的各种开关。驾驶辅助控制包括跟车间距(跟随车间距离)控制以及车道维持控制。
跟车间距控制是公知的(例如参照日本特开2014-148293、日本特开2006-315491以及日本专利第4172434等),有时被称为“自适应巡航控制(Adaptive Cruise Control)”。以下,将跟车间距控制简称为“ACC”。
车道维持控制是公知的(例如参照日本特开2008-195402、日本特开2009-190464、日本特开2010-6279以及日本专利第4349210等),有时被称为“车道保持辅助(LaneKeeping Assist)”或者“车道跟踪辅助(Lane Tracing Assist)”。以下,将车道维持控制简称为“LKA”。
操作开关18具备ACC开关18a以及LKA开关18b。ACC开关18a是由驾驶员在使ACC开始/结束时所操作的开关。LKA开关18b是由驾驶员在使LKA开始/结束时所操作的开关。
再者,发动机ECU20连接于发动机致动器(engine actuator)(发动机Act)21。发动机致动器21包括变更内燃机22的节流阀的开度的节流阀致动器。发动机ECU20通过驱动发动机致动器21,能够变更内燃机22产生的转矩。内燃机22产生的转矩经由未图示的变速器传递到驱动轮。因此,发动机ECU20通过控制发动机致动器21,能够控制车辆VA的驱动力并变更加速状态(加速度)。
此外,在车辆VA为混合动力车的情况下,发动机ECU20能够控制由作为车辆驱动源的“内燃机以及电动机”中的任一方或者两方所产生的驱动力。再者,在车辆VA为电动汽车的情况下,发动机ECU20能够控制由作为车辆驱动源的电动机所产生的驱动力。
制动ECU30连接于制动致动器(brake actuator)(制动Act)31。制动致动器31是控制摩擦制动机构32的致动器,包括公知的液压回路。摩擦制动机构32具备固定于车轮的制动盘32a和固定于车身的制动钳32b。制动致动器31根据来自制动ECU30的指示,调整向内置于制动钳32b的轮缸供给的液压,利用该液压将制动垫按压于制动盘32a而产生摩擦制动力。因此,制动ECU30通过控制制动致动器31,能够控制车辆VA的制动力并变更加速状态(减速度、即负的加速度)。
EPB-ECU40连接于泊车制动致动器(以下,称为“PKB-致动器”)(PKB-Act)41。PKB-致动器41将制动垫按压于制动盘32a、或者在具备鼓式制动器的情况下将制动蹄按压于与车轮一起旋转的鼓而产生摩擦制动力。因此,EPB-ECU40能够使用PKB-致动器41对车轮施加泊车制动力,将车辆维持在停止状态。以下,将通过使PKB-致动器41工作所实现的车辆VA的制动简称为“EPB”。
转向ECU50是公知的电动助力转向系统的控制装置,连接于马达驱动器(motordriver)51。马达驱动器51连接于转向用马达52。马达52组装于车辆VA的转向机构(包括方向盘SW、转向轴US以及转向用齿轮机构等)。马达52通过从马达驱动器51供给的电力产生转矩,利用该转矩而能够施加转向辅助转矩,或使左右的转向轮转向。
仪表ECU60连接于未图示的数显式仪表,并且连接于危险信号灯(hazard lamp)61以及刹车灯(stop lamp)62。仪表ECU60能够根据来自驾驶辅助ECU10的指示,控制危险信号灯61的闪烁以及刹车灯62的点亮。
警报ECU70连接于蜂鸣器71以及显示器72。警报ECU70能够根据来自驾驶辅助ECU10的指示,使蜂鸣器71鸣响而引起驾驶员的注意,或使显示器72显示引起注意用的标记(警告灯)。
车身ECU80连接于门锁装置81、喇叭82、门传感器83以及安全带传感器84。车身ECU80能够根据来自驾驶辅助ECU10的指示,控制门锁装置81,将车辆VA的门锁上,或将锁解除。再者,车身ECU80能够根据来自驾驶辅助ECU10的指示,使喇叭82鸣响。门传感器83输出表示车辆VA的各个门的状态(打开状态和关闭状态中的某一方)的信号。安全带传感器84输出表示车辆VA的各个座位的安全带的状态(佩戴状态和解除状态中的某一方)的信号。
以下,对由驾驶辅助ECU10执行的“ACC以及LKA”进行简单说明。
(ACC)
ACC包括恒速行驶控制和前车跟随控制这两种控制。恒速行驶控制是不需要操作加速踏板11a以及制动踏板12a而以使车辆VA的行驶速度与目标速度(设定速度)Vset一致的方式使车辆VA行驶的控制。前车跟随控制是不需要操作加速踏板11a以及制动踏板12a而一边将前车(跟随对象车辆)与车辆VA的车间距离维持在目标车间距离Dset、一边使车辆VA跟随着跟随对象车辆的控制。跟随对象车辆是在车辆VA的前方区域且在车辆VA的跟前行驶的车辆。
驾驶辅助ECU10在ACC开关18a被设定为导通(ON)状态时,基于车辆周边信息所包含的目标物信息判定是否存在跟随对象车辆。驾驶辅助ECU10在判定为不存在跟随对象车辆的情况下执行恒速行驶控制。驾驶辅助ECU10使用发动机ECU20控制发动机致动器21来控制驱动力,并且根据需要使用制动ECU30控制制动致动器31来控制制动力,以使得车速SPD与目标速度Vset一致。
与此相对,驾驶辅助ECU10在判定为存在跟随对象车辆的情况下执行前车跟随控制。驾驶辅助ECU10通过对目标车间时间tw乘以车速SPD,计算目标车间距离Dset。目标车间时间tw使用未图示的车间时间开关来设定。驾驶辅助ECU10使用发动机ECU20控制发动机致动器21来控制驱动力,并且根据需要使用制动ECU30控制制动致动器31来控制制动力,以使得车辆VA与跟随对象车辆之间的车间距离与目标车间距离Dset一致。
(LKA)
LKA是变更车辆VA的转向轮的转向角以使得车辆VA沿着利用车道标线所设定的目标行驶线路行驶的控制(转向控制)。驾驶辅助ECU10当在ACC开关18a为导通状态的状况下LKA开关18b被设定为导通状态时执行LKA。
具体而言,驾驶辅助ECU10基于车辆周边信息所包含的车道信息,取得关于车辆VA正在行驶的行驶车道的“左白线以及右白线”的信息。驾驶辅助ECU10推定将左白线与右白线之间的行驶车道的宽度方向上的中央位置连结的线作为“车道的中央线LM”。驾驶辅助ECU10将中央线LM设定为目标行驶线路TL。
驾驶辅助ECU10计算为了执行LKA所需的LKA控制参数。LKA控制参数包括目标行驶线路TL的曲率CL(=中央线LM的曲率半径R的倒数)、距离dL以及偏航角θL等。距离dL是目标行驶线路TL与车辆VA的车宽方向的中心位置之间的(实质上为道路宽度方向上的)距离。偏航角θL是相对于目标行驶线路TL的车辆VA的前后方向轴的角度。
驾驶辅助ECU10使用LKA控制参数(CL、dL、θL),按照公知的方法,计算用于使车辆VA的位置与目标行驶线路TL一致的自动转向扭矩Trb。自动转向扭矩Trb是没有由驾驶员对方向盘SW进行的操作而通过马达52的驱动对转向机构施加的转矩。驾驶辅助ECU10经由马达驱动器51控制马达52,以使得对转向机构施加的实际的转矩与自动转向扭矩Trb一致。即,驾驶辅助ECU10执行转向控制。
(工作的概要)
驾驶辅助ECU10在执行着ACC以及LKA的情况下,反复判定驾驶员是否处于“失去了驾驶车辆的能力的异常状态(以下,简称为“异常状态”)”。如上所述,异常状态例如包括困倦驾驶状态以及身心机能停止状态等。驾驶辅助ECU10在连续判定为驾驶员处于异常状态的情况下,执行与多个驾驶模式相应的车辆控制。以下,使用图2对这些多个驾驶模式的控制进行说明。
·通常模式
在图2所示的例子中,在时间点t1以前,ACC以及LKA双方都正常执行。在时间点t1,驾驶辅助ECU10检测出是驾驶员没有在操作驾驶操作件的状态。以下,将这种状态称为“特定状态(或者无操作状态)”。特定状态指的是,由根据驾驶员的驾驶操作而变化的“加速踏板操作量AP、制动踏板操作量BP以及转向扭矩Tra”中的一个以上的组合构成的参数均不变化的状态。在本例中,驾驶辅助ECU10将“加速踏板操作量AP、制动踏板操作量BP以及转向扭矩Tra”均不变化并且转向扭矩Tra为“0”的状态视作特定状态。
驾驶辅助ECU10在最初检测到特定状态的时间点(t1)以后继续执行ACC以及LKA。在时间点t1,虽然检测到特定状态,但还没有检测到异常状态。将这样没有检测到异常状态而ACC以及LKA双方都被执行的驾驶模式称为“通常模式”。此外,在ACC以及LKA开始的时间点所执行的初始化例程中,驾驶辅助ECU10将驾驶模式设定为通常模式。
·第1模式
时间点t2是从时间点t1经过了第1时间阈值Tth1的时间点。在从最初检测到特定状态的时间点t1起特定状态持续了第1时间阈值Tth1的情况下,驾驶辅助ECU10判定为驾驶员处于异常状态。在判定为驾驶员处于异常状态的时间点t2,驾驶辅助ECU10将驾驶模式从通常模式变更为第1模式。
在第1模式下,驾驶辅助ECU10开始进行对于驾驶员的警告处理。具体而言,驾驶辅助ECU10使从蜂鸣器71产生警告声,并且使显示器72显示警告灯。此外,驾驶辅助ECU10在时间点t2以后也继续执行ACC以及LKA。
在驾驶员注意到上述的警告处理而重新开始驾驶操作的情况下,驾驶操作件的参数(AP、BP以及Tra)中的一个以上发生变化。在该情况下,驾驶辅助ECU10判定为驾驶员的状态从异常状态恢复到正常状态。因此,驾驶辅助ECU10将驾驶模式从第1模式变更为通常模式。由此,驾驶辅助ECU10使警告处理结束。
·第2模式
时间点t3是从时间点t2经过了第2时间阈值Tth2的时间点。在从最初检测到异常状态的时间点t2起特定状态持续了第2时间阈值Tth2的情况下(即在时间点t3),驾驶辅助ECU10将驾驶模式从第1模式变更为第2模式。
在第2模式下,驾驶辅助ECU10执行以第1减速度(负的加速度)α1使车辆VA减速的第1减速控制来代替通常的ACC。此外,驾驶辅助ECU10继续执行LKA。
驾驶辅助ECU10在时间点t3以后也继续进行警告处理。此外,驾驶辅助ECU10也可以在时间点t3以后变更蜂鸣器71的警告声的音量和/或发声间隔。再者,驾驶辅助ECU10也可以将未图示的音频设备从开启状态设定为关闭状态。由此,驾驶员容易注意到蜂鸣器71的警告声。
再者,驾驶辅助ECU10在时间点t3以后执行对于车辆VA周围的其他车辆以及行人等的通知处理。具体而言,驾驶辅助ECU10向仪表ECU60输出危险信号灯61的闪烁指令,使危险信号灯61闪烁。
在驾驶员注意到上述的警告处理而重新开始驾驶操作的情况下,驾驶辅助ECU10将驾驶模式从第2模式变更为通常模式。由此,驾驶辅助ECU10使第1减速控制、警告处理以及通知处理结束。而且,如上所述,驾驶辅助ECU10根据有无跟随对象车辆,使恒速行驶控制和前车跟随控制中的某一方重新开始。
·第3模式
时间点t4是从时间点t3经过了第3时间阈值Tth3的时间点。如此,在从时间点t3起特定状态持续了第3时间阈值Tth3的情况下(即在时间点t4),驾驶辅助ECU10将驾驶模式从第2模式变更为第3模式。
在第3模式下,驾驶辅助ECU10执行以第2减速度(负的加速度)α2使车辆VA减速的第2减速控制来代替第1减速控制。此外,驾驶辅助ECU10继续执行LKA。第2减速度α2的大小(绝对值)比第1减速度α1的大小大。由此,驾驶辅助ECU10使车辆VA减速而强制使车辆VA停止。此外,驾驶辅助ECU10在到车辆VA停止之前继续执行LKA。
在时间点t4以后,驾驶辅助ECU10也继续进行警告处理以及通知处理。此外,在通知处理中,驾驶辅助ECU10执行以下追加的处理。驾驶辅助ECU10向仪表ECU60输出刹车灯62的点亮指令,使刹车灯62点亮。除此之外,驾驶辅助ECU10还对车身ECU80输出喇叭82的鸣响指令,使喇叭82鸣响。
在驾驶员注意到上述的警告处理而重新开始驾驶操作的情况下,驾驶辅助ECU10将驾驶模式从第3模式变更为通常模式。由此,驾驶辅助ECU10使第2减速控制、警告处理以及通知处理结束。而且,驾驶辅助ECU10根据有无跟随对象车辆,使恒速行驶控制和前车跟随控制中的某一方重新开始。
以下,有时将如上所述“对车辆VA施加制动力而使车辆VA停止的控制(第2模式的第1减速控制以及第3模式的第2减速控制)”统称为“停止控制”。
·第4模式
时间点t5是车辆VA由于第2减速控制而停止的时间点。在时间点t5,驾驶辅助ECU10将驾驶模式从第3模式变更为第4模式。驾驶辅助ECU10使LKA结束。再者,驾驶辅助ECU10使第2减速控制结束。除此之外,驾驶辅助ECU10向车身ECU80输出门锁解除指令,使门锁装置81解除门锁。
在第4模式下,驾驶辅助ECU10执行停止保持控制。停止保持控制是通过利用EPB对车辆VA持续施加制动力而使车辆VA保持在停止状态的控制。
驾驶辅助ECU10在时间点t5以后也继续进行警告处理以及通知处理。在通知处理中,驾驶辅助ECU10使刹车灯62的点亮结束,仅使危险信号灯61的闪烁以及喇叭82的鸣响继续。
·停止保持控制的解除
如上所述,在车辆VA停止后,会有救助者对车辆VA的驾驶员进行救助的情况。在救助者救助驾驶员时,例如会有驾驶员的脚碰到加速踏板11a的情况。在现有装置中,存在尽管驾驶员正在被救助但停止保持控制被解除而车辆VA开始移动的可能性。
于是,驾驶辅助ECU10在执行停止保持控制期间反复判定预定的第1条件是否成立。第1条件在加速踏板操作量AP大于预定的操作量阈值APth时成立。在本例中,操作量阈值APth为“0”。此外,操作量阈值APth也可以设定为小到车辆VA不会突然开始移动的程度的值。
驾驶辅助ECU10在第1条件成立的情况下,禁止解除停止保持控制。因此,即使在救助者救助驾驶员时驾驶员的脚碰到加速踏板11a的情况下(第1条件成立),驾驶辅助ECU10也不解除停止保持控制而继续执行该控制。由此,能够防止在救助驾驶员期间停止保持控制被解除而使车辆突然开始移动。
驾驶辅助ECU10仅在第1条件不成立并且被进行了预定的解除操作的情况下解除停止保持控制。在本例中,解除操作是按下LKA开关18b的操作。此外,解除操作不限定于此。也可以在驾驶员的座位附近设置解除操作用的未图示的按钮。解除操作也可以是按下该按钮的操作。
(工作)
驾驶辅助ECU10的CPU(以下,简称为“CPU”)每经过预定时间dT,执行图3至图7所示的各个例程。
此外,CPU每经过预定时间dT,从传感器11至16以及各种开关18a和18b接收它们的检测信号或者输出信号并存储于RAM。
在预定的定时(timing),CPU从图3的例程的步骤300开始进行处理而进入步骤301,判定ACC以及LKA此刻是否在被执行。当ACC以及LKA此刻没有被执行的情况下,在步骤301中判定为“否”而直接进入步骤395,暂时结束本例程。
当ACC以及LKA此刻在被执行的情况下,CPU在步骤301中判定为“是”而进入步骤302,判定驾驶模式是否为通常模式。在驾驶模式不是通常模式的情况下,CPU在步骤302中判定为“否”而直接进入步骤395,暂时结束本例程。
现在,若假定是在ACC以及LKA刚刚开始之后,则驾驶模式为通常模式。在该情况下,CPU在步骤302中判定为“是”而进入步骤303,基于各种传感器(11、12以及13)的检测信号,判定是否检测到特定状态。如上所述,在“加速踏板操作量AP、制动踏板操作量BP以及转向扭矩Tra”均不变化并且转向扭矩Tra为“0”的情况下,CPU检测到特定状态。
CPU在检测到特定状态的情况下,在步骤303中判定为“是”而进入步骤304,使第1持续时间T1增加预定时间dT。第1持续时间T1表示特定状态所持续的时间。如上所述,时间dT是相当于图3的例程的执行周期的时间。此外,第1持续时间T1在上述的初始化例程中被设定为“0”。
接着,CPU进入步骤305,判定第1持续时间T1是否在第1时间阈值Tth1以上。若假定此刻是刚刚最初检测到特定状态之后的时间点,则第1持续时间T1小于第1时间阈值Tth1。CPU在步骤305中判定为“否”而进入步骤395,暂时结束本例程。
与此相对,在由于特定状态持续而第1持续时间T1变为第1时间阈值Tth1以上的情况下,CPU在步骤305中判定为“是”,依次进行以下所述的步骤306以及步骤307的处理。之后,CPU进入步骤395,暂时结束本例程。
步骤306:CPU判定为驾驶员的状态是异常状态,将驾驶模式设定为第1模式。
步骤307:CPU将第1持续时间T1重置为“0”。
此外,CPU在步骤303中判定为“否”的情况下,进入步骤308,将第1持续时间T1重置为“0”,之后,直接进入步骤395而暂时结束本例程。
进一步,在预定的定时,CPU从图4的例程的步骤400开始进行处理而进入步骤401,判定驾驶模式是否为第1模式。在驾驶模式不是第1模式的情况下,CPU在步骤401中判定为“否”而直接进入步骤495,暂时结束本例程。
与此相对,假定由于判定为驾驶员的状态是异常状态因此当前的驾驶模式为第1模式。在该情况下,CPU在步骤401中判定为“是”而进入步骤402。
在步骤402中,CPU判定是否检测到特定状态。CPU在检测到特定状态的情况下,在步骤402中判定为“是”而进入步骤403,使第2持续时间T2增加时间dT。第2持续时间T2表示从移至第1模式的控制的时间点(即执行步骤306的处理的时间点)起特定状态所持续的时间。换言之,第2持续时间T2表示从最初判定为驾驶员处于异常状态的时间点起异常状态所持续的时间。此外,第2持续时间T2在上述的初始化例程中被设定为“0”。
接着,CPU进入步骤404,判定第2持续时间T2是否小于第2时间阈值Tth2。在驾驶模式刚转换为第1模式后,第2持续时间T2小于第2时间阈值Tth2。因此,CPU在步骤404中判定为“是”而进入步骤405,如前所述执行警告处理。具体而言,CPU使从蜂鸣器71产生警告声,并且使显示器72显示警告灯。之后,CPU进入步骤495,暂时结束本例程。
假定驾驶员注意到警告处理而重新开始驾驶操作。在该状况下,CPU进入步骤402后,CPU在该步骤402中判定为“否”,依次进行以下所述的步骤406以及步骤407的处理。之后,CPU进入步骤495,暂时结束本例程。
步骤406:CPU将驾驶模式设定为通常模式。由此,CPU在步骤401中判定为“否”,因此警告处理结束。
步骤407:CPU将第2持续时间T2重置为“0”。
与此相对,假定由于特定状态持续而第2持续时间T2变为第2时间阈值Tth2以上。在该情况下,CPU在步骤404中判定为“否”,依次进行以下所述的步骤408以及步骤409的处理。之后,CPU进入步骤495,暂时结束本例程。
步骤408:CPU将驾驶模式设定为第2模式。
步骤409:CPU将第2持续时间T2重置为“0”。
进一步,在预定的定时,CPU从图5的例程的步骤500开始进行处理而进入步骤501,判定驾驶模式是否为第2模式。在驾驶模式不是第2模式的情况下,CPU在步骤501中判定为“否”而直接进入步骤595,暂时结束本例程。
与此相对,在驾驶模式为第2模式的情况下,CPU在步骤501中判定为“是”而进入步骤502,判定是否检测到特定状态。CPU在检测到特定状态的情况下,在步骤502中判定为“是”而进入步骤503,使第3持续时间T3增加预定时间dT。第3持续时间T3表示从移至第2模式的控制的时间点(即执行步骤408的处理的时间点)起特定状态所持续的时间。换言之,第3持续时间T3表示从移至第2模式的控制的时间点起异常状态所持续的时间。此外,第3持续时间T3在上述的初始化例程中被设定为“0”。
接着,CPU进入步骤504,判定第3持续时间T3是否小于第3时间阈值Tth3。在驾驶模式刚转换为第2模式后,第3持续时间T3小于第3时间阈值Tth3。因此,CPU在步骤504中判定为“是”,依次进行以下所述的步骤505至步骤507的处理。之后,CPU进入步骤595,暂时结束本例程。
步骤505:CPU执行以第1减速度α1使车辆VA减速的第1减速控制来代替通常的ACC。
步骤506:CPU如前所述执行警告处理。具体而言,CPU使从蜂鸣器71产生警告声,并且使显示器72显示警告灯。
步骤507:CPU如前所述执行通知处理。具体而言,CPU使危险信号灯61闪烁。
假定驾驶员注意到警告处理而重新开始驾驶操作。在该状况下,CPU进入步骤502后,CPU在该步骤502中判定为“否”,依次进行以下所述的步骤508以及步骤509的处理。之后,CPU进入步骤595,暂时结束本例程。
步骤508:CPU将驾驶模式设定为通常模式。由此,CPU在步骤501中判定为“否”,因此第1减速控制、警告处理以及通知处理结束。而且,CPU根据有无跟随对象车辆,使恒速行驶控制和前车跟随控制中的某一方重新开始。
步骤509:将第3持续时间T3重置为“0”。
与此相对,假定由于特定状态持续而第3持续时间T3变为第3时间阈值Tth3以上。在该情况下,CPU在步骤504中判定为“否”,依次进行以下所述的步骤510以及步骤511的处理。之后,CPU进入步骤595,暂时结束本例程。
步骤510:CPU将驾驶模式设定为第3模式。
步骤511:将第3持续时间T3重置为“0”。
进一步,在预定的定时,CPU从图6的例程的步骤600开始进行处理而进入步骤601,判定驾驶模式是否为第3模式。在驾驶模式不是第3模式的情况下,CPU在步骤601中判定为“否”而直接进入步骤695,暂时结束本例程。
与此相对,在驾驶模式为第3模式的情况下,CPU在步骤601中判定为“是”而进入步骤602,判定是否检测到特定状态。CPU在检测到特定状态的情况下,在步骤602中判定为“是”而进入步骤603,判定车速SPD是否大于“0”。在车辆VA尚未停止的情况下,CPU在该步骤603中判定为“是”,依次进行以下所述的步骤604至步骤606的处理。之后,CPU进入步骤695,暂时结束本例程。
步骤604:CPU执行以第2减速度α2使车辆VA减速的第2减速控制来代替第1减速控制。
步骤605:CPU如前所述执行警告处理。
步骤606:CPU如前所述执行通知处理。具体而言,CPU使危险信号灯61闪烁。再者,CPU使刹车灯62点亮,并且使喇叭82鸣响。
假定驾驶员注意到警告处理而重新开始驾驶操作。在该状况下,CPU进入步骤602后,CPU在该步骤602中判定为“否”而进入步骤607,将驾驶模式设定为通常模式。由此,CPU在步骤601中判定为“否”,因此第2减速控制、警告处理以及通知处理结束。而且,CPU根据有无跟随对象车辆,使恒速行驶控制和前车跟随控制中的某一方重新开始。
另一方面,假定车辆VA由于第2减速控制而停止。在该情况下,CPU在步骤603中判定为“否”,依次进行以下所述的步骤608以及步骤609的处理。之后,CPU进入步骤695,暂时结束本例程。
步骤608:CPU使LKA结束。
步骤609:CPU将驾驶模式设定为第4模式。此外,CPU在该时间点控制门锁装置81,将车辆VA的门锁解除。
进一步,在预定的定时,CPU从图7的例程的步骤700开始进行处理而进入步骤701,判定预定的停止保持条件是否成立。停止保持条件在驾驶模式为第4模式并且解除标志X1的值为“0”时成立。解除标志X1是表示是否将停止保持控制解除的标志,如后所述,在停止保持控制被解除/结束时被设定为“1”。此外,解除标志X1在上述的初始化例程中被设定为“0”。
在停止保持条件不成立的情况下,CPU在步骤701中判定为“否”而直接进入步骤795,暂时结束本例程。
与此相对,在驾驶模式刚转换为第4模式后的时间点,停止保持条件成立。在该情况下,CPU在步骤701中判定为“是”,依次进行以下所述的步骤702至步骤704的处理。之后,CPU进入步骤705。
步骤702:CPU如前所述执行停止保持控制。
步骤703:CPU如前所述执行警告处理。
步骤704:CPU如前所述执行通知处理。具体而言,CPU使危险信号灯61闪烁,并且使喇叭82鸣响。
CPU进入步骤705,判定第1条件是否成立(即加速踏板操作量AP是否大于操作量阈值APth)。在第1条件成立的情况下,CPU在步骤705中判定为“是”而直接进入步骤795,暂时结束本例程。在该情况下,解除标志X1的值维持为“0”,因此继续执行停止保持控制。
与此相对,在第1条件不成立的情况下,CPU在步骤705中判定为“否”而进入步骤706,判定是否进行了预定的解除操作。在没有进行解除操作的情况下,CPU在步骤706中判定为“否”而进入步骤795,暂时结束本例程。由于解除标志X1的值维持为“0”,因此继续执行停止保持控制。
另一方面,在进行了解除操作的情况下,CPU在步骤706中判定为“是”而进入步骤707,将解除标志X1的值设定为“1”。之后,CPU进入步骤795,暂时结束本例程。由此,在步骤701中CPU判定为“否”。因此,CPU使停止保持控制结束,并且使警告处理以及通知处理结束。
此外,在停止保持控制结束后驾驶员希望使ACC以及LKA重新开始的情况下,驾驶员操作ACC开关18a以及LKA开关18b。根据该操作,CPU将驾驶模式设定为通常模式而重新开始进行ACC以及LKA。
根据具备上述构成的第1装置,即使在救助者救助驾驶员时驾驶员的脚碰到加速踏板11a的情况下,也不解除停止保持控制而继续执行该控制。因此,能够降低在救助驾驶员期间车辆开始移动的可能性。
再者,即使当在驾驶员的脚碰到加速踏板11a的状态下误进行了解除操作的情况下(救助者或者驾驶员的手臂碰到LKA开关18b的情况下),第1装置也能够不解除停止保持控制而继续执行该控制。
此外,CPU也可以执行图8的例程以代替图7的例程。图8的例程是在图7的步骤704与步骤705之间插入步骤706的例程。在该构成中,当CPU进入图8的例程的步骤706时,在进行了解除操作的情况下,CPU在该步骤706中判定为“是”而进入步骤705,判定第1条件是否成立。在第1条件成立的情况下,CPU在步骤705中判定为“是”而直接进入步骤795,暂时结束本例程。在该情况下,由于解除标志X1的值维持为“0”,因此继续执行停止保持控制。如此,CPU也可以在被进行了解除操作的时间点判定第1条件是否成立,在第1条件成立的情况下使解除操作无效。
<第2实施方式>
接着,对第2实施方式涉及的车辆控制装置(以下,有时也称为“第2装置”)进行说明。第2装置与第1装置的不同之处在于,除了第1条件之外,还要判定第2条件是否成立,第2条件在驾驶员当前正在被救助的或然性高时成立。以下,以该不同之处为中心进行说明。
(工作)
第2装置的驾驶辅助ECU10的CPU执行图9所示的例程以代替图7所示的例程。图9所示的例程是在图7的例程中追加了步骤901的例程。因此,省略对于图9所示的步骤中的附加了与图7相同的标号的步骤的说明。
CPU从图9的例程的步骤900开始进行处理。CPU在步骤705中判定为“是”而进入步骤901时,CPU判定预定的第2条件是否成立,第2条件在驾驶员当前正在被救助的或然性高时成立。第2条件在与驾驶员的座位对应的门为打开状态时成立。CPU能够基于门传感器83的输出信号判定驾驶员的门是否为打开状态。
在第2条件成立的情况下,CPU在步骤901中判定为“是”而直接进入步骤995,暂时结束本例程。在该情况下,停止保持控制不解除而继续执行。
另一方面,在第2条件不成立的情况下,CPU在步骤901中判定为“否”而进入步骤706,判定是否进行了解除操作。在进行了解除操作的情况下,CPU在步骤706中判定为“是”,如前所述执行步骤707的处理。因此,停止保持控制、警告处理以及通知处理结束。
与此相对,在没有进行解除操作的情况下,CPU在步骤706中判定为“否”而进入步骤995,暂时结束本例程。在该情况下,停止保持控制不解除而继续执行。
根据具备上述构成的第2装置,仅在救助者正在救助驾驶员的或然性高的情况下,不解除停止保持控制而继续执行该控制。
假定在车辆VA停止后驾驶员的状态从异常状态恢复到正常状态。此时,驾驶员有可能为了立即重新开始车辆VA的行驶而触碰加速踏板11a。在这种状况下,即使驾驶员进行了解除操作,第1装置也不解除停止保持控制而继续执行该控制。因此,驾驶员要重新开始驾驶的意思有可能不会立即被反映。与此相对,在第2装置中,即使驾驶员碰到加速踏板11a,在第2条件不成立时,也能够通过驾驶员进行解除操作而解除停止保持控制。
此外,与图8的例程同样地,在图9的例程中,也可以在步骤704与步骤705之间插入步骤706。在该情况下,CPU在被进行了解除操作的时间点判定第1条件以及第2条件是否成立,在第1条件以及第2条件成立的情况下使解除操作无效。
此外,本发明并非限定于上述实施方式,而可以在本发明的范围内采用各种变形例。
第2条件不限定于上述例子。CPU也可以在以下的条件A1和条件A2中的一方或者两方成立时判定为第2条件成立。
条件A1:与驾驶员的座位对应的门为打开状态。
条件A2:驾驶员的安全带为解除状态。CPU能够基于安全带传感器84的输出信号,判定驾驶员的安全带是否为解除状态。
例如,驾驶辅助ECU10也可以利用日本特开2013-152700等所公开的所谓的“驾驶员监视技术”,判定驾驶员是否处于异常状态。更具体而言是,也可以在车室内的部件(例如方向盘以及支柱等)上设置拍摄驾驶员的摄像头。驾驶辅助ECU10使用摄像头的拍摄图像来监视驾驶员的视线的方向或者脸的方向。驾驶辅助ECU10在驾驶员的视线的方向或者脸的方向持续为前方向以外的方向的情况下,判定为驾驶员处于异常状态。因此,驾驶员的视线的方向或者脸的方向持续为前方向以外的方向的时间也可以用作前述的“第1持续时间T1”、“第2持续时间T2”以及“第3持续时间T3”。
加速操作件不限定于加速踏板11a,例如也可以为加速杆(lever)。制动操作件不限定于制动踏板12a,例如也可以为制动杆。
在第1模式至第4模式的控制中,驾驶辅助ECU10也可以禁止基于加速踏板操作量AP的变化的车辆的加速。换言之,驾驶辅助ECU10也可以在第1模式至第4模式的控制的执行期间,即使在加速踏板11a被操作的情况下,也使基于该操作的加速请求无效(即,将对于内燃机22的请求转矩设定为零)。
驾驶辅助ECU10也可以使ACC的前车跟随控制继续直至开始进行第4模式的控制(停止保持控制)的时间点。在该构成中,驾驶辅助ECU10仅在跟随对象车辆突然减速的情况下执行前车跟随控制。例如,当在驾驶辅助ECU10正在执行第3模式的控制的状况下跟随对象车辆突然减速的情况下,驾驶辅助ECU10根据此情况,以比第2减速度α2大的减速度使车辆VA减速。
在图2的例子中,也可以在从时间点t1到时间点t2的期间内进行警告处理。例如,在从时间点t1起特定状态持续了预定时间(
- 车辆用图像获取装置、控制装置、包括了车辆用图像获取装置或控制装置的车辆和车辆用图像获取方法
- 车辆用图像获取装置、控制装置、包括了车辆用图像获取装置或控制装置的车辆和车辆用图像获取方法