高稳定性全自动陶瓷激光钻孔机
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及激光钻孔机技术领域,具体为高稳定性全自动陶瓷激光钻孔机。
背景技术
激光钻孔机是最早达到实用化的激光加工技术,也是激光加工的主要应用领域之一,设备中激光束在空间和时间上的高度集中,可以将光斑直径缩小到微米级从而获得很高的功率密度,几乎可以对任何材料进行激光打孔,激光钻孔与其他方法如机械钻孔、电火花加工等常规打孔手段相比,具有以下显著的优点:激光打孔速度快,效率高,经济效益好。
当前的激光钻孔机在对陶瓷板钻固定深度的孔洞时,往往需要操作人员手动将陶瓷板固定到激光钻孔头的正下方,然后才能准确地对陶瓷板指定的位置处进行钻孔,无法自动准确地将陶瓷板的位置进行校正并固定;且当前的激光钻孔机往往只能对同一类型的陶瓷板进行位置校正并固定,无法对不用宽度的方形陶瓷板或不同直径的圆形陶瓷板进行校正并固定,从而极大地降低了整个陶瓷激光钻孔机的适用范围;同时当前的陶瓷激光钻孔机在对一组陶瓷板激光钻孔后,往往还需要将其表面加工残留的粉尘处理干净才能将其取出并更换新一组陶瓷板,这极大地降低了整个陶瓷激光钻孔机的加工效率。
发明内容
本发明的目的在于提供高稳定性全自动陶瓷激光钻孔机,以解决上述背景技术中提出的相关问题。
为实现上述目的,本发明提供如下技术方案:高稳定性全自动陶瓷激光钻孔机,包括主体仓,所述主体仓顶部的一端对称设置有电磁滑轨,且两组电磁滑轨滑块的顶部共同设置有激光钻孔组件,所述主体仓顶部远离激光钻孔组件的一端设置有除尘组件,所述主体仓两侧的中间位置处共同设置有夹持输送组件,所述主体仓内部的中间位置处均匀安装有导向辊,所述主体仓顶部的中间位置处安装有双头电机,且双头电机两端的输出轴对称安装有螺纹杆,所述螺纹杆的外侧螺纹设置有连接板,所述连接板的底部与夹持输送组件框架外侧的顶部固定连接,所述主体仓顶部靠近激光钻孔组件一端的一侧安装有控制面板,所述控制面板通过导线分别与电磁滑轨、激光钻孔组件和双头电机电连接。
优选的,所述夹持输送组件包括驱动装置、U型固定架、大链轮、U型连接架、U型夹具、小链轮、链条、双层安装框和安装槽,所述主体仓的两侧对称设置有双层安装框,且双层安装框靠近主体仓的一侧延伸至主体仓的内部,所述双层安装框的两侧对称均匀设置有小链轮,所述双层安装框内部两侧的两端对称安装有U型连接架,所述主体仓两端的两侧对称开设有安装槽,且安装槽的内部设置有大链轮,所述大链轮和小链轮的外侧共同设置有链条,所述链条的链板上安装有U型固定架,且U型固定架的外侧安装有U型夹具,所述主体仓顶部远离控制面板一端的两侧共同设置有与两组大链轮传动连接的驱动装置,所述控制面板通过导线与驱动装置电连接。
优选的,所述除尘组件包括除尘仓、抽气泵、条形通孔、安装杆、进气管、伸缩管和过滤网,所述主体仓顶部远离控制面板的一端安装有除尘仓,且除尘仓的内部均匀设置有过滤网,所述除尘仓顶部的一侧安装有抽气泵,所述抽气泵的输入端与除尘仓内部一侧的底部连通,所述除尘仓的顶部安装有伸缩管,且伸缩管远离除尘仓的一端安装有进气管,所述进气管的底端延伸至主体仓的内部,所述主体仓顶部靠近除尘仓的一端开设有与进气管相适配的条形通孔,所述进气管外侧的顶部安装有安装杆,且安装杆远离进气管的一端与激光钻孔组件壳体的顶部固定连接,所述控制面板通过导线与抽气泵电连接。
优选的,所述驱动装置包括驱动电机、第一皮带轮、第二皮带轮、传动皮带、第一齿轮和第二齿轮,一组所述大链轮转轴的顶部安装有第二齿轮,同一端另一组所述大链轮转轴的顶部安装有第一皮带轮,所述主体仓顶部靠近第二齿轮的位置处安装有与第二齿轮相互啮合额的第一齿轮,且第一齿轮转轴外侧的底部安装有第二皮带轮,而第二皮带轮和第一皮带轮的外侧共同设置有传动皮带,所述主体仓顶部远离控制面板一端的一侧安装有驱动电机,而驱动电机的输出轴与相邻一组大链轮转轴的顶端固定连接。
优选的,一组所述双层安装框顶部靠近控制面板的一端安装有L型指针,所述主体仓顶部靠近L型指针一端的一侧设置有长度刻度线。
优选的,两组所述双层安装框靠近控制面板的一端对称安装有U型安装架,且两组U型安装架远离双层安装框的一端安装有相互配合的导向板,两组所述导向板的内侧对称设置有插槽。
优选的,所述主体仓底部的四角位置处对称安装有支撑腿,所述主体仓底部远离控制面板的一端安装有传送带装置。
优选的,所述主体仓顶部两侧的中间位置处对称安装有轴承,且轴承的内侧与相邻一组螺纹杆外侧的中间位置处固定连接,两组所述螺纹杆外侧螺纹的螺旋方向相反。
优选的,所述抽气泵的输出端安装有排气管,且排气管的出口方向朝向激光钻孔组件的外侧。
优选的,所述安装杆远离进气管的一端与激光钻孔组件壳体顶部的中间位置处固定连接,所述激光钻孔组件的激光钻孔头也位于激光钻孔组件壳体下方的中间位置处。
与现有技术相比,本发明提供了高稳定性全自动陶瓷激光钻孔机,具备以下有益效果:
1、本发明在加工方形或圆形的陶瓷板时,操作人员只需要将陶瓷板顺着导向板内侧插槽的导向插进去即可,陶瓷板进入到主体仓内部后,控制驱动装置带动两组双层安装框上的大链轮转动,两组双层安装框外侧的链条相向转动,过程中主体仓内两侧相对的两组U型夹具便会自动将陶瓷板夹在两者之间,并随着链条在双层安装框的外侧循环转动,此时的陶瓷板位于主体仓内部的正中间位置处,在将陶瓷板逐渐夹置并送进主体仓的内部后,便由激光钻孔组件对经过的陶瓷板表面进行激光钻孔加工,且主体仓的内底部设置有多组导向辊,这些导向辊的表面与陶瓷板的底部滚动接触,可以进一步保证陶瓷板进入到主体仓内部后的高稳定性,也就能充分保证激光钻孔组件对陶瓷板表面钻孔的精确性。
2、本发明在对陶瓷板加工前,操作人员根据陶瓷板的宽度或直径调整两组双层安装框之间的间距,通过控制面板控制双头电机带动两组螺纹杆同步转动,由于螺纹作用,迫使与两组连接板相连的双层安装框逐渐相互靠近或远离,根据双层安装框上L型指针在主体仓顶部长度刻度线上的位置,确定两组双层安装框之间的间距,也就调整了主体仓内两侧相对位置两组U型夹具之间的间距,使得整个装置可以对不同宽度或直径的陶瓷板进行夹持固定,提高了陶瓷激光钻孔机的适用范围,且也能将陶瓷板始终位于主体仓内部的中间位置处,有助于激光钻孔组件激光钻孔的准确性。
3、本发明在对一组陶瓷板钻孔完成后,这组陶瓷板随着链条的转动而逐渐向进气管的下方移动,利用抽气泵产生的吸力将陶瓷板表面存在的粉尘依次经过进气管和伸缩管进入到除尘仓的内顶部,粉尘被多组过滤网过滤阻挡,过滤后的空气直接排出到外界环境中,在陶瓷激光钻孔机对第二组陶瓷板表面进行钻孔时,控制电磁滑轨带动激光钻孔组件在主体仓的顶部左右移动,配合夹持输送组件可以对陶瓷板表面的不同位置进行钻孔加工,而在激光钻孔组件移动的过程中,与激光钻孔组件壳体固定连接的安装杆也带着进气管在主体仓的内部左右移动,对第一组陶瓷板相应的位置处进行吸尘处理,并且整个过程中不需要操作人员其他操作步骤,既提高了该装置的加工效率,也实现了该装置的加工全自动化。
附图说明
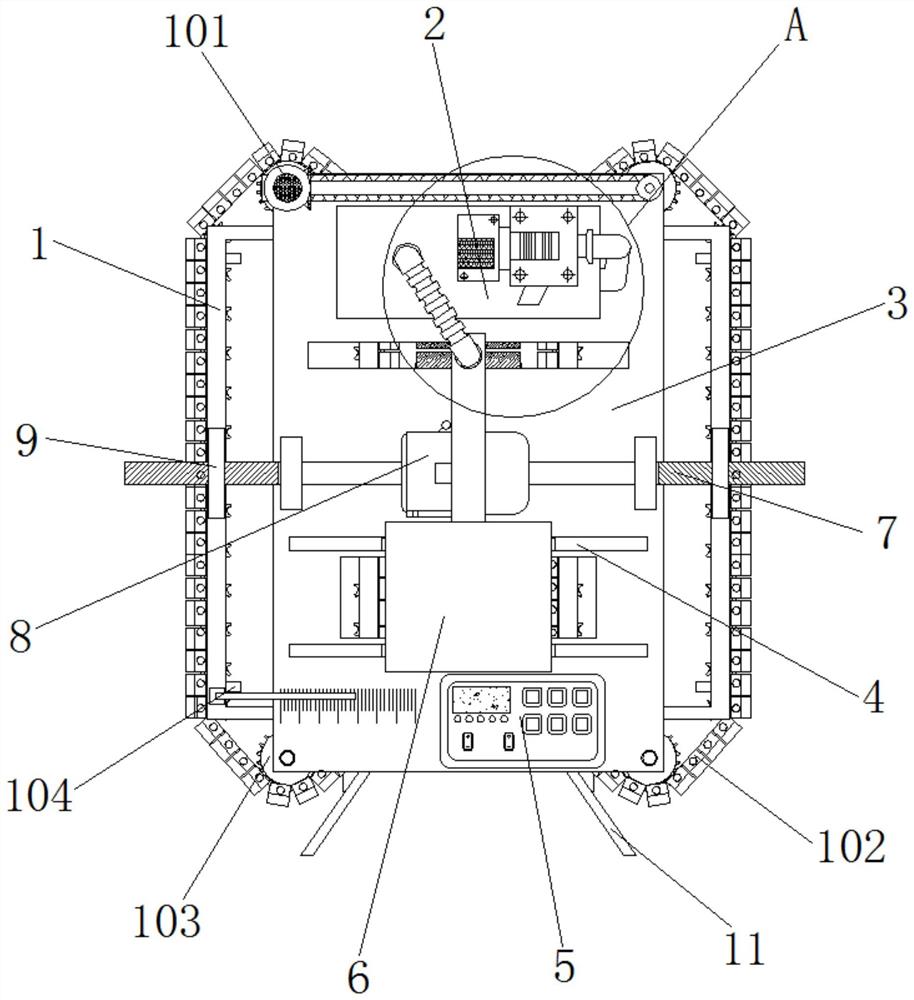
图1为本发明的俯视图;
图2为本发明的俯视剖视图;
图3为本发明主体仓的俯视剖视图;
图4为本发明双层安装框的俯视剖视图;
图5为本发明主体仓的立体示意图;
图6为本发明双层安装框的立体示意图;
图7为本发明U型固定架与链条链板的连接示意图;
图8为本发明除尘仓的后视剖视图;
图9为本发明图1的A处放大图。
图中:1、夹持输送组件;101、驱动装置;102、U型固定架;103、大链轮;104、U型连接架;105、U型夹具;106、小链轮;107、链条;108、双层安装框;109、安装槽;2、除尘组件;201、除尘仓;202、抽气泵;203、条形通孔;204、安装杆;205、进气管;206、伸缩管;207、过滤网;3、主体仓;4、电磁滑轨;5、控制面板;6、激光钻孔组件;7、螺纹杆;8、双头电机;9、连接板;10、导向辊;11、导向板;12、U型安装架。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-9,本发明提供一种技术方案:高稳定性全自动陶瓷激光钻孔机,包括主体仓3,主体仓3顶部的一端对称设置有电磁滑轨4,且两组电磁滑轨4滑块的顶部共同设置有激光钻孔组件6,主体仓3顶部远离激光钻孔组件6的一端设置有除尘组件2,主体仓3两侧的中间位置处共同设置有夹持输送组件1,主体仓3内部的中间位置处均匀安装有导向辊10,主体仓3顶部的中间位置处安装有双头电机8,且双头电机8两端的输出轴对称安装有螺纹杆7,螺纹杆7的外侧螺纹设置有连接板9,连接板9的底部与夹持输送组件1框架外侧的顶部固定连接,主体仓3顶部靠近激光钻孔组件6一端的一侧安装有控制面板5,控制面板5通过导线分别与电磁滑轨4、激光钻孔组件6和双头电机8电连接。
进一步地,夹持输送组件1包括驱动装置101、U型固定架102、大链轮103、U型连接架104、U型夹具105、小链轮106、链条107、双层安装框108和安装槽109,主体仓3的两侧对称设置有双层安装框108,且双层安装框108靠近主体仓3的一侧延伸至主体仓3的内部,双层安装框108的两侧对称均匀设置有小链轮106,双层安装框108内部两侧的两端对称安装有U型连接架104,主体仓3两端的两侧对称开设有安装槽109,且安装槽109的内部设置有大链轮103,大链轮103和小链轮106的外侧共同设置有链条107,链条107的链板上安装有U型固定架102,且U型固定架102的外侧安装有U型夹具105,主体仓3顶部远离控制面板5一端的两侧共同设置有与两组大链轮103传动连接的驱动装置101,控制面板5通过导线与驱动装置101电连接,有助于自动对陶瓷板固定在3内部的中间位置处,并将其向主体仓3的内部输送,从而便于后续激光钻孔组件6的加工,也保证了激光钻孔组件6对陶瓷板加工的精确性。
进一步地,除尘组件2包括除尘仓201、抽气泵202、条形通孔203、安装杆204、进气管205、伸缩管206和过滤网207,主体仓3顶部远离控制面板5的一端安装有除尘仓201,且除尘仓201的内部均匀设置有过滤网207,除尘仓201顶部的一侧安装有抽气泵202,抽气泵202的输入端与除尘仓201内部一侧的底部连通,除尘仓201的顶部安装有伸缩管206,且伸缩管206远离除尘仓201的一端安装有进气管205,进气管205的底端延伸至主体仓3的内部,主体仓3顶部靠近除尘仓201的一端开设有与进气管205相适配的条形通孔203,进气管205外侧的顶部安装有安装杆204,且安装杆204远离进气管205的一端与激光钻孔组件6壳体的顶部固定连接,控制面板5通过导线与抽气泵202电连接,配合夹持输送组件1可以持续不断地对加工后陶瓷板的表面进行除尘处理。
进一步地,驱动装置101包括驱动电机、第一皮带轮、第二皮带轮、传动皮带、第一齿轮和第二齿轮,一组大链轮103转轴的顶部安装有第二齿轮,同一端另一组大链轮103转轴的顶部安装有第一皮带轮,主体仓3顶部靠近第二齿轮的位置处安装有与第二齿轮相互啮合额的第一齿轮,且第一齿轮转轴外侧的底部安装有第二皮带轮,而第二皮带轮和第一皮带轮的外侧共同设置有传动皮带,主体仓3顶部远离控制面板5一端的一侧安装有驱动电机,而驱动电机的输出轴与相邻一组大链轮103转轴的顶端固定连接,有助于带动两组双层安装框108上的链条107相向转动,从而可以配合U型固定架102和U型夹具105将陶瓷板夹持,并将其向主体仓3远离控制面板5的一端移动。
进一步地,一组双层安装框108顶部靠近控制面板5的一端安装有L型指针,主体仓3顶部靠近L型指针一端的一侧设置有长度刻度线,有助于提高调整两组双层安装框108之间间距的准确性。
进一步地,两组双层安装框108靠近控制面板5的一端对称安装有U型安装架12,且两组U型安装架12远离双层安装框108的一端安装有相互配合的导向板11,两组导向板11的内侧对称设置有插槽,有助于将陶瓷板导向相对的多组U型夹具105的内侧。
进一步地,主体仓3底部的四角位置处对称安装有支撑腿,主体仓3底部远离控制面板5的一端安装有传送带装置,有助于将加工并除尘完成的陶瓷板输送到指定的位置处。
进一步地,主体仓3顶部两侧的中间位置处对称安装有轴承,且轴承的内侧与相邻一组螺纹杆7外侧的中间位置处固定连接,两组螺纹杆7外侧螺纹的螺旋方向相反,在双头电机8带动两组螺纹杆转动时,可以让两组双层安装框108相互靠近或远离。
进一步地,抽气泵202的输出端安装有排气管,且排气管的出口方向朝向激光钻孔组件6的外侧,有助于将过滤后的空气吹向激光钻孔组件6的外侧,对其进行风吹降温。
进一步地,安装杆204远离进气管205的一端与激光钻孔组件6壳体顶部的中间位置处固定连接,激光钻孔组件6的激光钻孔头也位于激光钻孔组件6壳体下方的中间位置处,在激光钻孔组件6对第二组陶瓷板进行钻孔时,进气管205正好可以对第一组陶瓷板表面相同位置的粉尘进行吸取。
实施例1,如图1-7所示,当需要对不同宽度或直径的陶瓷板进行钻孔加工时,先根据所需要钻孔的陶瓷板宽度或直径调整两组双层安装框108之间的间距,操作人员通过控制面板5控制双头电机8带动两组螺纹杆7同步转动,而由于螺纹作用,迫使与两组连接板9相连的双层安装框108逐渐相互靠近或远离,根据双层安装框108上L型指针在主体仓3顶部长度刻度线上的位置,确定两组双层安装框108之间的间距,也就调整了主体仓3内两侧相对位置两组U型夹具105之间的间距,使得整个装置可以对不同宽度或直径的陶瓷板进行夹持固定,并且在双层安装框108移动的过程中,大链轮103会被迫转动,而链条107的松紧度则不会发生变化,之后操作人员将陶瓷板顺着导向板11内侧插槽的导向插进去即可,操作简单方便。
实施例2,如图1、5、8和9所示,在需要对陶瓷板表面存在的粉尘进行去除时,在激光钻孔组件6对第二组陶瓷板钻孔加工时,第一组钻孔好的陶瓷板则移动到进气管205的下方,而在激光钻孔组件6横向来回移动的过程中,与激光钻孔组件6壳体固定连接的安装杆204也带着进气管205在主体仓3的内部左右移动,对第一组陶瓷板相应的位置处进行吸尘处理,粉尘依次经过进气管205和伸缩管206进入到除尘仓201的内顶部,之后粉尘被多组过滤网207过滤阻挡,过滤后的空气直接排出并吹向激光钻孔组件6的外侧,对激光钻孔组件6的表面进行风吹降温,由于整个装置可以持续不断地对陶瓷片进行钻孔加工,也就使得除尘组件2可以持续不断地对钻孔后的陶瓷板进行除尘处理,极大地保证了整个陶瓷激光钻孔机的加工效率。
工作原理:使用前将装置接通电源,首先操作人员根据所需要钻孔的陶瓷板宽度或直径调整两组双层安装框108之间的间距,通过控制面板5控制双头电机8带动两组螺纹杆7同步转动,由于螺纹作用,迫使与两组连接板9相连的双层安装框108逐渐相互靠近或远离,根据双层安装框108上L型指针在主体仓3顶部长度刻度线上的位置,确定两组双层安装框108之间的间距,也就调整了主体仓3内两侧相对位置两组U型夹具105之间的间距,使得整个装置可以对不同宽度或直径的陶瓷板进行夹持固定,并且,在双层安装框108移动的过程中,大链轮103会被迫转动,而链条107的松紧度则不会发生变化,之后操作人员将陶瓷板顺着导向板11内侧插槽的导向插进去即可,陶瓷板进入到主体仓3内部后,控制驱动装置101带动两组双层安装框108上的大链轮103转动,两组双层安装框108外侧的链条107相向转动,过程中主体仓3内两侧相对的两组U型夹具105便会自动将陶瓷板夹在两者之间,并随着链条107在双层安装框108的外侧循环转动,此时的陶瓷板位于主体仓3内部的正中间位置处,在将陶瓷板逐渐夹置并送进主体仓3的内部后,便由激光钻孔组件6对经过的陶瓷板表面进行激光钻孔加工,在陶瓷激光钻孔机对陶瓷板表面进行钻孔时,控制电磁滑轨4带动激光钻孔组件6在主体仓3的顶部横向来回移动,配合夹持输送组件1带动陶瓷板在主体仓3的内部纵向移动,可以让激光钻孔组件6对陶瓷板表面不同的位置处进行钻孔,在激光钻孔组件6对第二组陶瓷板钻孔加工时,第一组钻孔好的陶瓷板则移动到进气管205的下方,而在激光钻孔组件6横向来回移动的过程中,与激光钻孔组件6壳体固定连接的安装杆204也带着进气管205在主体仓3的内部左右移动,对第一组陶瓷板相应的位置处进行吸尘处理,粉尘依次经过进气管205和伸缩管206进入到除尘仓201的内顶部,之后粉尘被多组过滤网207过滤阻挡,过滤后的空气直接排出并吹向激光钻孔组件6的外侧,对激光钻孔组件6的表面进行风吹降温,除尘完成的陶瓷板从主体仓3远离控制面板5的一端离开并落到主体仓3下方的传送带装置上。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
该文中出现的电器元件均与外界的主控器及220V市电电连接,并且主控器可为计算机等起到控制的常规已知设备。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 高稳定性全自动陶瓷激光钻孔机
- 激光钻孔机的校正方法以及采用其的激光钻孔机