医用图像诊断系统及方法、输入装置以及显示装置
文献发布时间:2023-06-19 13:48:08
技术领域
本说明书以及附图所公开的实施方式涉及医用图像诊断系统、医用图像诊断方法、输入装置以及显示装置。
本申请基于2020年6月19日在日本提交的特愿2020-105945号并主张优先权,将其内容援用于此。
背景技术
对于医疗行业,医生不足、技师不足成为严重的问题。另一方面,由于人工智能出现、通过5G、6G这种新无线通信系统而提高了数据的传输速度、传输量,因此自动诊断、远程诊断等的需求提高。今后,如果X射线CT(Computed Tomography)装置的价格以及辐射量降低,则有望更容易被用于诊查等。在诊察用途中,由于不需要造影剂、特殊的扫描技术,因此与检查相关的技巧较容易。但是,即使是这样的用途,在偏远地区、发展中国家等,由于医生、技师不足而存在无法频繁地进行检查这样的课题。该课题并不限定于X射线CT装置,在MRI(Magnetic Resonance Imaging)装置、超声波图像诊断装置、核医学诊断装置这样的其他医用图像摄像装置(也称作医用图像诊断装置)中也共通。
专利文献1:日本特表2016-530483号公报
专利文献2:日本特表2005-527245号公报
专利文献3:日本特表2012-528403号公报
发明内容
本说明书以及附图所公开的实施方式要解决的课题在于,能够安全且无损便利性地对被检体进行检查。但是,通过本说明书以及附图所公开的实施方式要解决的课题并不限定于上述课题。也能够将与后述的实施方式所示的各构成带来的各效果对应的课题定位为其他课题。
实施方式的医用图像诊断系统具有处理电路,该处理电路对用于检查被检体的工作流程所包含的多个步骤各自的转换进行控制。上述处理电路为,取得上述多个步骤中的第1步骤中的表示上述被检体的准备状况的第1信息,并取得表示允许从上述第1步骤向第2步骤转换的第2信息,基于上述第1信息以及上述第2信息对从上述第1步骤向上述第2步骤的转换进行控制。
附图说明
图1是表示实施方式的医用图像诊断系统的构成例的图。
图2是表示实施方式的终端装置的构成例的图。
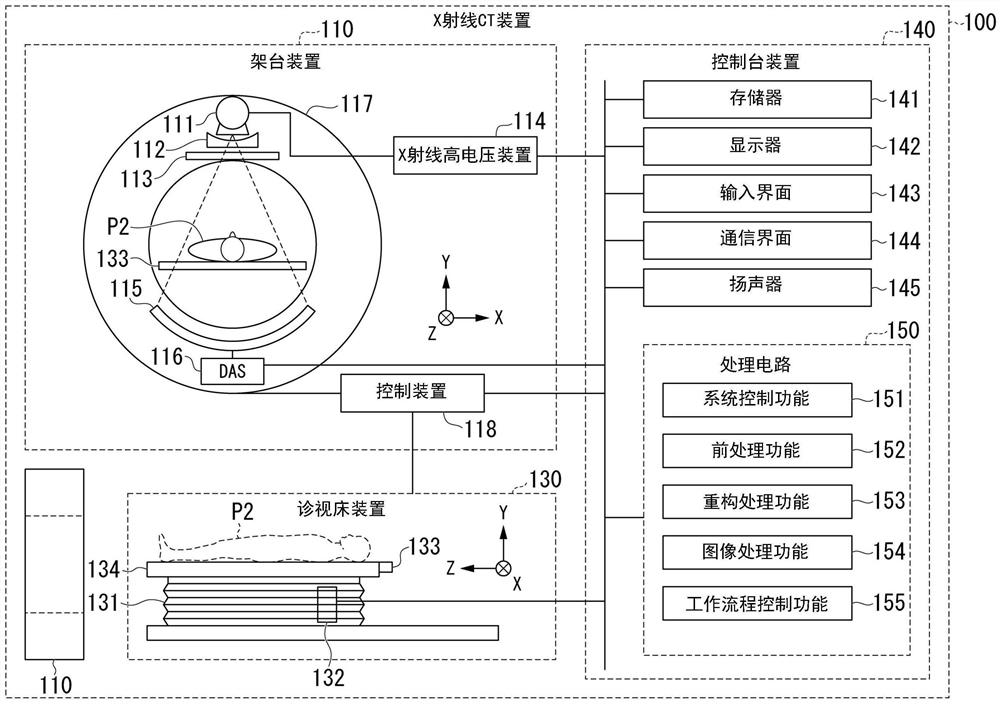
图3是表示实施方式的X射线CT装置的构成例的图。
图4是表示实施方式的架台装置的立体图。
图5是表示实施方式的X射线CT装置的一系列处理流程的一例的流程图。
图6是表示实施方式的X射线CT装置的一系列处理流程的一例的流程图。
图7是示意性地表示对应于患者的姿势使显示器移动的情况的图。
图8是示意性地表示对应于患者的姿势使显示器移动的情况的图。
图9是表示实施方式的X射线CT装置的紧急停止时的一系列处理流程的流程图。
图10是表示实施方式的投影仪的一例的图。
图11是用于说明焦点位置的调整方法的图。
图12是表示实施方式的终端装置的其他构成例的图。
具体实施方式
以下,参照附图对实施方式的医用图像诊断系统、医用图像诊断方法、输入装置以及显示装置进行说明。
[医用图像诊断系统的构成]
图1是表示实施方式的医用图像诊断系统1的构成例的图。医用图像诊断系统1例如具备终端装置10、医用图像摄像装置100以及摄像机200。终端装置10、医用图像摄像装置100以及摄像机200经由通信网络NW能够通信地连接。
通信网络NW是指利用了电通信技术的信息通信网整体。通信网络NW除了医院基础LAN(Local Area Network)等无线/有线LAN、因特网以外,还包括电话通信线路网、光纤通信网络、电缆通信网络以及卫星通信网络等。
终端装置10是医疗工作者P1利用的个人计算机、平板电脑终端、手机等终端装置。医疗工作者P1例如是医生、技师、护士这样的医疗从业者。例如,医疗工作者P1利用终端装置10对医用图像摄像装置100进行远程操作或者对作为被检体(被验者)的患者P2发出指示。
医用图像摄像装置100是通过对患者P2进行扫描而生成医用图像,并基于该医用图像对患者P2进行诊断的装置。医用图像摄像装置100例如可以是X射线CT装置,除此之外,也可以是MRI装置、超声波图像诊断装置、核医学诊断装置等。以下,作为一例,对医用图像摄像装置100为X射线CT装置的情况进行说明。
摄像机200例如安装于设置有X射线CT装置100的CT室的顶棚、墙壁等。摄像机200例如对进入CT室的患者P2进行摄像,将该CT室内的图像经由通信网络NW发送至终端装置10,或者发送至X射线CT装置100。摄像机200的图像可以是静止图像,也可以是动态图像。摄像机200可以将所摄像的图像直接发送至终端装置10,也可以由X射线CT装置100中转而间接地发送至终端装置10。摄像机200是“传感器”的一例。
[终端装置的构成]
图2是表示实施方式的终端装置10的构成例的图。终端装置10例如具备通信界面11、输入界面12、显示器13、存储器14以及处理电路20。
通信界面11经由通信网络NW与X射线CT装置100、摄像机200等外部装置进行通信。通信界面11例如包括NIC(Network Interface Card:网络接口卡)等。
输入界面12接受来自操作者(例如医疗工作者P1)的各种输入操作,并将所接受到的输入操作转换成电信号而输出至处理电路20。例如,输入界面12包括鼠标、键盘、轨迹球、开关、按钮、操纵杆、触摸面板等。输入界面12例如也可以是麦克风等接受声音输入的用户界面。在输入界面12为触摸面板的情况下,输入界面12也可以兼备显示器13的显示功能。
在本说明书中,输入界面12不限于仅具备鼠标、键盘等物理的操作构件。例如,从与装置分体设置的外部的输入设备接收与输入操作对应的电信号、并将该电信号输出至控制电路的电信号的处理电路,也包含在输入界面12的例子中。
显示器13显示各种信息。例如,显示器13显示由处理电路20生成的图像、用于接受来自医疗工作者P1的各种输入操作的GUI(Graphical User Interface)等。例如,显示器13是LCD(Liquid Crystal Display)、CRT(Cathode Ray Tube)显示器、有机EL(ElectroLuminescence)显示器等。
存储器14例如由RAM(Random Access Memory)、闪存器等半导体存储元件、硬盘、光盘来实现。这些非暂时性的存储介质通过NAS(Network Attached Storage)、外部存储服务器装置这样的经由通信网络NW连接的其他存储装置来实现。存储器14也可以包括ROM(Read Only Memory)、寄存器等非暂时性的存储介质。
处理电路20例如具备取得功能21、显示控制功能22以及发送控制功能23。处理电路20例如通过硬件处理器(计算机)执行存储于存储器14(存储电路)的程序来实现这些功能。
硬件处理器例如是指CPU(Central Processing Unit)、GPU(GraphicsProcessing Unit)、面向确定用途的集成电路(Application Specific IntegratedCircuit;ASIC)、可编程逻辑器件(例如,简单可编程逻辑器件(Simple ProgrammableLogic Device:SPLD)或者复杂可编程逻辑器件(Complex Programmable Logic Device:CPLD)、现场可编程门阵列(Field Programmable Gate Array:FPGA))等电路(circuitry)。也可以代替在存储电路中保存程序,而构成为将程序直接编入到硬件处理器的电路内。在该情况下,硬件处理器通过读出编入到电路内的程序并执行来实现功能。上述程序可以预先保存于存储器14,也可以保存于DVD、CD-ROM等非暂时性的存储介质,并通过将非暂时性的存储介质安装于终端装置10的驱动装置(未图示)来从非暂时性的存储介质安装于存储器14。硬件处理器并不限定于构成为单一的电路,也可以将多个独立的电路组合而构成为一个硬件处理器,并实现各功能。也可以将多个构成要素合并到一个硬件处理器而实现各功能。
取得功能21经由通信界面11而从摄像机200取得CT室的图像,或者经由通信界面11而从X射线CT装置100取得控制信息、生命信息。控制信息是用于对X射线CT装置100进行控制以便对患者P2进行扫描的各种信息。生命信息例如是心率、脉搏率、血压、呼吸频率、体温这样的与生命体征相关的数值信息。取得功能21也可以经由通信界面11从X射线CT装置100取得通过X射线CT装置100进行X射线摄影(扫描)而得到的医用图像(以下,称作CT图像)。CT图像可以是一张断层图像,也可以是多张断层图像。CT图像可以是多个时间相位的图像,也可以是捕获图像。
显示控制功能22使显示器13显示由取得功能21取得的CT室的图像、控制信息、生命信息、CT图像等。
发送控制功能23将输入至输入界面12的信息经由通信界面11发送至X射线CT装置100。
[X射线CT装置的构成]
图3是表示实施方式的X射线CT装置100的构成例的图。X射线CT装置100例如具备架台装置110、诊视床装置130以及控制台装置140。在图3中,为了便于说明而记载了从Z轴方向观察架台装置110的图和从X轴方向观察架台装置110的图的双方,但在实际中,架台装置110为一个。在实施方式中,将非倾斜状态下的旋转框架117的旋转轴或者诊视床装置130的顶板133的长边方向定义为Z轴方向,将与Z轴方向正交且相对于地面水平的轴定义为X轴方向,将与Z轴方向正交且相对于地面垂直的方向定义为Y轴方向。
架台装置110例如具有X射线管111、楔块112、准直器113、X射线高电压装置114、X射线检测器115、数据收集系统(以下,称为DAS:Data Acquisition System)116、旋转框架117、以及控制装置118。
X射线管111为,通过从X射线高电压装置114施加高电压,由此从阴极(灯丝)朝向阳极(靶)照射热电子,由此产生X射线。X射线管111包括真空管。例如,X射线管111是通过向旋转的阳极照射热电子而产生X射线的旋转阳极型的X射线管。
楔块112是用于调节从X射线管111向患者P2照射的X射线量的滤波器。楔块112使在其自身中透射的X射线衰减,以使从X射线管111向患者P2照射的X射线量的分布成为预先确定的分布。楔块112也被称作楔型滤波器(wedge filter)、蝴蝶结型滤波器(bow-tiefilter)。楔块112例如是将铝加工成规定的靶角度、规定的厚度而得到的。
准直器113是用于使透射了楔块112的X射线的照射范围收缩的机构。准直器113例如通过多块铅板的组合来形成狭缝,由此使X射线的照射范围收缩。准直器113有时也称作X射线光圈。
X射线高电压装置114例如具有高电压产生装置以及X射线控制装置。高电压产生装置具有包括变压器(transformer)以及整流器等的电路,产生对X射线管111施加的高电压。X射线控制装置根据应当使X射线管111产生的X射线量对高电压产生装置的输出电压进行控制。高电压产生装置可以通过上述变压器来进行升压,也可以通过逆变器来进行升压。X射线高电压装置114可以设置于旋转框架117,也可以设置于架台装置110的固定框架(未图示)一侧。
X射线检测器115对由X射线管111产生、且穿过患者P2而入射的X射线的强度进行检测。X射线检测器115将与所检测到的X射线的强度相应的电信号(也可以是光信号等)输出至DAS116。X射线检测器115例如具有多个X射线检测元件列。多个X射线检测元件列分别沿着以X射线管111的焦点为中心的圆弧在通道方向上排列有多个X射线检测元件。多个X射线检测元件列沿着切片方向(列方向、row方向)排列。
X射线检测器115例如是具有格栅、闪烁体阵列和光传感器阵列的间接型的检测器。闪烁体阵列具有多个闪烁体。各个闪烁体具有闪烁体晶体。闪烁体晶体发出与所入射的X射线的强度相应的光量的光。格栅具有X射线屏蔽板,该X射线屏蔽板配置在闪烁体阵列的X射线所入射的面,具有吸收散射X射线的功能。格栅有时也被称作准直器(一维准直器或者二维准直器)。光传感器阵列例如具有光电倍增管(photo Multiplier:PMT)等光传感器。光传感器阵列输出与由闪烁体发出的光的光量相应的电信号。X射线检测器115也可以是具有将所入射的X射线转换成电信号的半导体元件的直接转换型的检测器。
DAS116例如具有放大器、积分器以及A/D转换器。放大器对由X射线检测器115的各X射线检测元件输出的电信号进行放大处理。积分器遍及视图期间(后述)对进行了放大处理后的电信号进行积分。A/D转换器将表示积分结果的电信号转换成数字信号。DAS116将基于数字信号的检测数据输出至控制台装置140。检测数据是根据生成源的X射线检测元件的通道编号、列编号以及表示所收集到的视图的视图编号来识别的X射线强度的数字值。视图编号是根据旋转框架117的旋转而变化的编号,例如是根据旋转框架117的旋转而增大的编号。因而,视图编号是表示X射线管111的旋转角度的信息。视图期间是收敛在从与某个视图编号对应的旋转角度到达到与下一个视图编号对应的旋转角度为止的区间的期间。DAS116对于检测视图的切换,可以根据从控制装置118输入的定时信号来检测,可以通过内部的计时器来检测,也可以根据从未图示的传感器取得的信号来检测。当在进行全扫描时通过X射线管111连续照射X射线的情况下,DAS116收集整个圆周量(360度)的检测数据组。当在进行半扫描时通过X射线管111连续照射X射线的情况下,DAS116收集半个圆周量(180度)的检测数据。
旋转框架117是使X射线管111、楔块112及准直器113与X射线检测器115在保持对置的状态下旋转的圆环状的旋转部件。旋转框架117由固定框架支承为以被导入其内部的患者P2为中心旋转自如。旋转框架117还支承DAS116。DAS116输出的检测数据从设置于旋转框架117的具有发光二极管(LED)的发送机,通过光通信而发送至设置于架台装置110的非旋转部分(例如固定框架)的具有光电二极管的接收机,并通过接收机转送至控制台装置140。作为检测数据从旋转框架117向非旋转部分的发送方法,并不限定于使用了上述光通信的方法,可以采用非接触式的任意的发送方法。旋转框架117只要能够支承X射线管111等而使其旋转,则并不限定于圆环状的部件,也可以是臂那样的部件。
控制装置118例如具备:具有CPU等处理器的处理电路;以及包括马达、致动器等的驱动机构。控制装置118接受来自安装于控制台装置140或者架台装置110的输入界面143的输入信号,而对架台装置110以及诊视床装置130的动作进行控制。
控制装置118例如使旋转框架117旋转、使架台装置110倾斜、或者使诊视床装置130的顶板133移动。在使架台装置110倾斜的情况下,控制装置118基于向输入界面143输入的倾斜角度(tilt angle),使旋转框架117以与Z轴方向平行的轴为中心旋转。控制装置118根据未图示的传感器的输出等来掌握旋转框架117的旋转角度。控制装置118将旋转框架117的旋转角度随时供给到处理电路150。控制装置118可以设置于架台装置110,也可以设置于控制台装置140。
控制装置118使架台装置110沿着移动轨道自动行进,进行正式扫描摄影,或者进行作为在执行正式扫描摄影之前进行的定位摄影的定位扫描摄影。
诊视床装置130是载放扫描对象的患者P2而将其导入架台装置110的旋转框架117内部的装置。诊视床装置130例如具有基台131、诊视床驱动装置132、顶板133以及支承框架134。基台131包括将支承框架134支承为能够沿着铅垂方向(Y轴方向)移动的壳体。诊视床驱动装置132包括马达、致动器。诊视床驱动装置132使载放有患者P2的顶板133沿着支承框架134在顶板133的长边方向(Z轴方向)上移动。顶板133是载放患者P2的板状部件。
控制台装置140例如具有存储器141、显示器142、输入界面143、通信界面144、扬声器145以及处理电路150。在本实施方式中,使控制台装置140与架台装置110分体来进行说明,但也可以在架台装置110中包括控制台装置140的各构成要素的一部分或者全部。
存储器141例如通过RAM、闪存器等半导体存储元件、硬盘、光盘等来实现。存储器141例如存储检测数据、投影数据、重构图像、CT图像等。这些数据也可以不存储于存储器141(或者在存储于存储器141的基础上),而存储于X射线CT装置100能够通信的外部存储器。外部存储器例如是通过管理外部存储器的云服务器接收读写的请求而由云服务器控制的存储器。存储器141存储扫描工作流程。扫描工作流程是决定了用于控制X射线CT装置100的一系列步骤(处理顺序)的模式信息。扫描工作流程也可以替换为程序、程序组件、算法或者序列等。
显示器142显示各种信息。例如,显示器142显示由处理电路150生成的CT图像、接受操作者(例如患者P2)进行的各种操作的GUI图像等。显示器142例如是液晶显示器、CRT、有机EL显示器等。显示器142可以设置于架台装置110。显示器142可以是桌面型,也可以是能够与控制台装置140的主体部进行无线通信的显示装置(例如平板电脑终端)。
输入界面143接受操作者(例如患者P2)进行的各种输入操作,并将表示所接受到的输入操作的内容的电信号输出至处理电路150。例如,输入界面143接受对检测数据或者投影数据(后述)进行收集时的收集条件、重构CT图像时的重构条件、以及根据CT图像生成后处理图像时的图像处理条件等的输入操作。例如,输入界面143通过鼠标、键盘、触摸面板、轨迹球、开关、按钮、操纵杆、脚踏板、摄像机、红外线传感器、麦克风等来实现。输入界面143也可以设置于架台装置110。输入界面143也可以通过能够与控制台装置140的主体部进行无线通信的显示装置(例如平板电脑终端)来实现。在本说明书中,输入界面143并不限定于具备鼠标、键盘等物理的操作构件。例如,从与装置分体设置的外部的输入设备接收与输入操作对应的电信号并将该电信号向控制电路输出的电信号的处理电路,也包含在输入界面143的例子中。
通信界面144例如包括NIC、无线通信模块等。通信界面144经由通信网络NW与终端装置10、摄像机200等外部装置进行通信。
扬声器145配置在操作者(例如患者P2)能够听到声音的位置。扬声器145基于由处理电路150输出的信息来输出声音。
处理电路150对X射线CT装置100整体的动作进行控制。处理电路150例如执行系统控制功能151、前处理功能152、重构处理功能153、图像处理功能154、工作流程控制功能155等。处理电路150例如通过硬件处理器执行存储于存储器141的扫描工作流程等的各种程序来实现这些功能。
硬件处理器例如是指CPU、GPU、面向特定用途集成电路、可编程逻辑器件(例如,简单可编程逻辑器件、复杂可编程逻辑器件、现场可编程门阵列)等电路(circuitry)。也可以代替在存储器141中存储程序,转而构成为将程序直接编入到硬件处理器的电路内。在该情况下,硬件处理器通过将编入到电路内的程序读出并执行来实现功能。硬件处理器并不限定于构成为单一的电路,也可以组合多个独立的电路而构成为1个处理器,并实现上述功能。也可以将多个构成要素合并到一个硬件处理器来实现各功能。
控制台装置140或者处理电路150所具有的各构成要素,也可以分散化而通过多个硬件来实现。处理电路150也可以不是控制台装置140所具有的构成,而通过能够与控制台装置140通信的处理装置来实现。处理装置例如是与一个X射线CT装置连接的工作站,或者是与多个X射线CT装置连接并总括执行与处理电路150同等的处理的装置(例如云服务器)。
系统控制功能151基于输入界面143所接受到的输入操作,对处理电路150的各种功能进行控制。
前处理功能152对由DAS116输出的检测数据进行对数转换处理、偏移校正处理、通道间的灵敏度校正处理、射束硬化校正等前处理,生成投影数据,并将所生成的投影数据存储于存储器141。
重构处理功能153对由前处理功能152生成的投影数据进行基于滤波校正反投影法、逐步近似重构法等重构处理,生成CT图像,并将所生成的CT图像存储于存储器141。
图像处理功能154基于输入界面143所接受到的输入操作,通过公知的方法将CT图像转换成三维图像、任意断面的断面图像数据。向三维图像的转换也可以由前处理功能152进行。
工作流程控制功能155按照保存于存储器141的扫描工作流程,对X射线高电压装置114、DAS116、控制装置118以及诊视床驱动装置132进行控制,由此对架台装置110的检测数据的收集处理进行控制。工作流程控制功能155按照保存于存储器141的扫描工作流程,分别控制进行用于收集扫描图像的摄影、收集用于诊断的CT图像的摄影时的各功能的动作。
工作流程控制功能155按照保存于存储器141的扫描工作流程,对显示器142、输入界面143、通信界面144以及扬声器145进行控制,由此,引导患者P2乘上诊视床装置130的顶板133,或者引导患者P2采取适合于扫描部位的姿势、动作(例如举起双手且屏住呼吸等),或者引导患者P2从诊视床装置130的顶板133下来,或者在扫描之前、扫描当中或扫描之后这样的定时与患者P2进行意向确认。即,工作流程控制功能155按照扫描工作流程,一边与患者P2进行对话一边进行用于CT扫描的各种处理(交互地进行处理),以便即使医疗工作者P1不在旁边,患者P2也能够使用X射线CT装置100对自己进行扫描。
图4是实施方式的架台装置110的立体图。如图示的例子那样,在架台装置110的壳体上形成有大致圆筒形状的开口160。在开口160中插入载放有患者P2的状态的诊视床装置130的顶板133。在架台装置110的壳体内部内置有上述X射线管111、楔块112、准直器113、X射线高电压装置114、X射线检测器115、DAS116、旋转框架117、控制装置118等。
在架台装置110的壳体上例如经由缆线安装有输入界面143。输入界面143与架台装置110的控制装置118、控制台装置140的处理电路150通过有线连接,对数据进行收发。将架台装置110与输入界面143相连的缆线,可以适当地决定为患者能够躺在诊视床装置130的顶板133上进行操作的程度的长度。输入界面143也可以代替缆线那样的有线,而通过无线与架台装置110的控制装置118、控制台装置140的处理电路150连接。在该情况下,输入界面143也可以是能够佩戴于患者P2的手腕等的可穿戴设备。
在输入界面143中设置有:第1按钮143a(图中的“OK按钮”),用于供患者P2同意进入扫描工作流程的下一个步骤;以及第2按钮143b(图中的“STOP按钮”),用于供患者P2不同意进入扫描工作流程的下一个步骤,而停止当前步骤的处理。第1按钮143a以及第2按钮143b可以是物理(或者有形(tangible))的按钮,也可以是虚拟(或者非有形(non-tangible))的按钮。例如,在输入界面143为触摸面板的情况下,第1按钮143a以及第2按钮143b也可以是虚拟的按钮。
在输入界面143为可穿戴设备的情况下,不一定设置第1按钮143a以及第2按钮143b。例如,在作为可穿戴设备的输入界面143佩戴于患者P2的手腕的情况下,输入界面143也可以根据张开手掌或者将手握成拳那样的患者P2的手的动作,来识别患者P2是同意进入下一个步骤还是不同意而请求停止当前步骤的处理。即,输入界面143也可以根据患者P2的手势来识别输入操作。
在诊视床装置130的顶板133上例如经由机械臂142a来安装有显示器142。例如,工作流程控制功能155通过驱动未图示的致动器来使机械臂142a动作,使显示器142的画面移动到患者P2的视线前方。由此,使患者P2视觉辨认各种图像。
例如,工作流程控制功能155也可以代替对安装有显示器142的机械臂142a进行控制,而对能够在架台装置110的开口160的壁面160a、CT室的顶棚等上映出图像的投影仪190进行控制。
[X射线CT装置的整体流程]
以下,对如以上那样构成的X射线CT装置100的处理的一例进行说明。图5以及图6是表示实施方式的X射线CT装置100的一系列处理流程的一例的流程图。
首先,工作流程控制功能155判定患者P2是否进入了CT室(步骤S100)。
例如,工作流程控制功能155也可以经由通信界面144从摄像机200取得CT室内的图像(静止图像或者动态图像),并基于所取得的图像来判定患者P2是否进入了CT室。例如,有时在CT室设置有自动或者半自动地开闭的电动式的门,且在该电动式的门上设置有检测开闭的传感器。在该情况下,工作流程控制功能155也可以经由通信界面144从传感器取得与门的开闭相关的电信号,并基于所取得的信号来判定患者P2是否进入了CT室。
工作流程控制功能155为,当判定为患者P2进入了CT室时,引导患者P2关闭该CT室的门(步骤S102)。
例如,工作流程控制功能155使显示器142显示促使关闭CT室的门的文字、图像,或者使扬声器145输出促使关闭CT室的门的声音。由此,能够抑制放射线从CT室泄漏,能够使CT室的泄漏射线量减少。
接着,工作流程控制功能155判定患者P2是否报告了将门关闭了的情况(步骤S104)。
例如,如果已经关闭了门,则引导患者P2操作输入界面143的第1按钮143a,作为其结果,假设患者P2操作了输入界面143的第1按钮143a。在该情况下,输入界面143将表示第1按钮143a被操作了的信号输出至处理电路150。表示第1按钮143a被操作了的信号是“第1信息”的一例。
工作流程控制功能155为,在无法从输入界面143取得表示第1按钮143a被操作了的信号的情况下,判定为患者P2未报告将门关闭了的情况。在该情况下,工作流程控制功能155返回到S102的处理,继续引导患者P2关闭CT室的门。
另一方面,工作流程控制功能155为,在从输入界面143取得了表示第1按钮143a被操作了的信号的情况下,判定为患者P2报告了将门关闭了的情况。然后,工作流程控制功能155判定是否由远程的医疗工作者P1确认了患者P2将门关闭了的情况(步骤S106)。
如上所述,摄像机200的图像被发送至终端装置10,在该终端装置10的显示器13上显示CT室的图像。例如,在医疗工作者P1观察显示于显示器13的CT室的图像而能够确认患者P2将门关闭了的情况下,对终端装置10的输入界面12输入门被关闭这样的确认结果。换言之,医疗工作者P1在能够确认患者P2将门关闭的情况下,对终端装置10的输入界面12输入允许向扫描工作流程的下一个步骤转换的信息。接收到该信息,终端装置10的发送控制功能23经由通信界面11将表示门被关闭这样的确认结果(允许向下一个步骤转换)的信息发送至X射线CT装置100。工作流程控制功能155为,在通信界面144从终端装置10接收到表示上述确认结果的信息的情况下,判定是否由远程的医疗工作者P1确认了患者P2将门关闭的情况。
工作流程控制功能155为,作为S106的处理,也可以利用人工智能(AI)来判定患者P2是否关闭了门。例如,工作流程控制功能155对为了判定门的开闭而预先学习了的机械学习的模型(以下,称为开闭判定模型)MDL1输入摄像机200的图像(即CT室内的图像),由此判定患者P2是否关闭了门。开闭判定模型MDL1是“学习完成模型”的一例。
开闭判定模型MDL1例如是通过CNN(Convolutional neural network)等神经网络来安装的模型。开闭判定模型MDL1是基于示教数据进行了监督学习的模型,该示教数据是将表示CT室的门的开闭状态的正解的信息作为标签(也称作目标)而与CT室内的图像建立了对应的数据。该正解的信息例如也可以是将表示门打开的概率α1和表示门关闭的概率α2分别作为要素的二维矢量。在将CT室内的图像作为输入数据、将表示CT室的门的开闭状态的正解的信息作为输出数据时,示教数据也可以替换为将这些输入数据与输出数据组合而成的数据组。通过使用这种示教数据对开闭判定模型MDL1进行学习,由此该开闭判定模型MDL1为,当被输入CT室内的图像时,会输出表示该CT室的门是打开还是关闭的信息。
例如,工作流程控制功能155为,在输入了摄像机200的图像的开闭判定模型MDL1输出了表示门关闭的概率α2比表示门打开的概率α1高的矢量的情况下(α2>α1),判定为患者P2关闭了门,在输出了表示门打开的概率α1比表示门关闭的概率α2高的矢量的情况下(α1>α2),判定为患者P2未关闭门。
用于对开闭判定模型MDL1进行学习的示教数据,也可以是将表示CT室的门的开闭状态的正解的信息和X射线CT装置100的控制信息的双方被作为标签而与CT室内的图像建立了对应的数据组。如上所述,X射线CT装置100的控制信息是用于对X射线CT装置100进行控制以便扫描患者P2的各种信息。具体而言,在控制信息中包含架台装置110中的旋转框架117的位置、DAS116对检测数据的取得状况、诊视床装置130中的顶板133的位置、CT图像的重构状况等。也可以代替X射线CT装置100的控制信息或者在其基础上,将学习对象的患者的生命信息作为标签而与图像建立对应。
在该情况下,工作流程控制功能155对于开闭判定模型MDL1,除了输入摄像机200的图像之外,还输入当前的X射线CT装置100的控制信息、当前的患者P2的生命信息,由此判定患者P2是否关闭了门。当前的患者P2的生命信息例如也可以从心电图、脉搏血氧计、血压计、体温计这样的未图示的生命计测设备取得。心电图、脉搏血氧计、血压计、体温计这样的生命计测设备是“传感器”的其他例子。
工作流程控制功能155在基于医疗工作者P1的确认结果以及/或者开闭判定模型MDL1的输出结果而判定为患者P2未关闭门的情况下,返回到S102的处理,继续引导患者P2关闭CT室的门。表示医疗工作者P1的确认结果的信息或者表示开闭判定模型MDL1的输出结果的信息是“第2信息”的一例。
另一方面,工作流程控制功能155在基于医疗工作者P1的确认结果以及/或者开闭判定模型MDL1的输出结果而判定为患者P2关闭了门的情况下,作为扫描工作流程的下一个步骤,引导患者P2躺(横卧)在诊视床装置130的顶板133上(步骤S108)。例如,工作流程控制功能155也可以利用显示器142、扬声器145来引导患者P2躺在诊视床装置130的顶板133上。
如此,工作流程控制功能155为,在步骤S102中,在(i)患者P2自己报告关闭了CT室的门、以及(ii)医疗工作者P1远程确认CT室的门关闭或者利用人工智能判定为CT室的门关闭这两个条件满足的情况下,允许向扫描工作流程的下一个步骤S108转换,并执行该步骤S108的处理。
接着,工作流程控制功能155判定患者P2是否报告了躺在诊视床装置130上的情况(步骤S110)。
例如,在患者P2躺在诊视床装置130上之后,引导患者P2对输入界面143的第1按钮143a进行操作,作为其结果,假设输入界面143的第1按钮143a被患者P2操作。在该情况下,输入界面143将表示第1按钮143a被操作了的信号输出至处理电路150。
工作流程控制功能155为,在无法从输入界面143取得表示第1按钮143a被操作了的信号的情况下,判定为患者P2未报告躺在诊视床装置130上的情况。在该情况下,工作流程控制功能155返回到S108的处理,继续引导患者P2躺在诊视床装置130上。
另一方面,工作流程控制功能155为,在从输入界面143取得了表示第1按钮143a被操作了的信号的情况下,判定为患者P2报告了躺在诊视床装置130上的情况。在该情况下,工作流程控制功能155判定是否由远程的医疗工作者P1确认了患者P2躺在诊视床装置130上的情况(步骤S112)。
例如,在医疗工作者P1观察显示于显示器13的CT室的图像而能够确认患者P2躺在诊视床装置130上的情况下,对终端装置10的输入界面12输入患者P2躺在诊视床装置130上这样的确认结果。换言之,在医疗工作者P1能够确认患者P2躺在诊视床装置130上的情况下,对终端装置10的输入界面12输入允许向扫描工作流程的下一个步骤转换的信息。接收到该信息,终端装置10的发送控制功能23经由通信界面11将表示患者P2躺在诊视床装置130上这样的确认结果(允许向下一个步骤转换)的信息发送至X射线CT装置100。工作流程控制功能155为,在通信界面144从终端装置10接收到表示上述确认结果的信息的情况下,判定是否由远程的医疗工作者P1确认了患者P2躺在诊视床装置130上的情况。
工作流程控制功能155为,作为S112的处理,也可以利用人工智能来判定患者P2是否躺在诊视床装置130上。例如,工作流程控制功能155为,对于为了判定患者P2是否相对于诊视床装置130横卧而预先学习了的机械学习的模型(以下,称为横卧判定模型)MDL2输入摄像机200的图像(即CT室内的图像),由此判定患者P2是否躺在诊视床装置130上。横卧判定模型MDL2是“学习完成模型”的其他例子。83
横卧判定模型MDL2例如与开闭判定模型MDL1同样,可以是通过CNN等神经网络来安装的模型。横卧判定模型MDL2是基于示教数据进行了监督学习的模型,该示教数据是将表示学习对象的患者是躺在还是未躺在诊视床装置130上的正解的信息作为标签而与CT室内的图像建立了对应的数据。该正解的信息例如也可以是将表示学习对象的患者躺在诊视床装置130上的概率α3和表示学习对象的患者未躺在诊视床装置130上的概率α4分别作为要素的二维矢量。在将CT室内的图像作为输入数据,将表示学习对象的患者是躺在还是未躺在诊视床装置130上的正解的信息作为输出数据时,示教数据也可以替换成将这些输入数据与输出数据组合而成的数据组。通过使用这样的示教数据对横卧判定模型MDL2进行学习,由此该横卧判定模型MDL2为,当被输入CT室内的图像时,会输出表示患者是躺在还是未躺在设置于该CT室的诊视床装置130上的信息。
例如,工作流程控制功能155也可以为,在横卧判定模型MDL2输出了概率α4比概率α3高的矢量的情况下(α4>α3),判定为患者P2未躺在诊视床装置130上,在输出了概率α3比概率α4高的矢量的情况下(α3>α4),判定为患者P2躺在诊视床装置130上。
用于对横卧判定模型MDL2进行学习的示教数据,也可以是将表示学习对象的患者是躺在还是未躺在诊视床装置130上的正解的信息和X射线CT装置100的控制信息的双方作为标签与CT室内的图像建立了对应的数据组。也可以代替X射线CT装置100的控制信息或者在其基础上,将学习对象的患者的生命信息作为标签与图像建立对应。
在该情况下,工作流程控制功能155为,对于横卧判定模型MDL2,除了输入摄像机200的图像之外,还输入当前的X射线CT装置100的控制信息、当前的患者P2的生命信息,由此判定患者P2是否躺在诊视床装置130上。
工作流程控制功能155为,在基于医疗工作者P1的确认结果以及/或者横卧判定模型MDL2的输出结果而判定为患者P2未躺在诊视床装置130上的情况下,返回到S108的处理,继续引导患者P2躺在诊视床装置130上。表示横卧判定模型MDL2的输出结果的信息是“第2信息”的其他例子。
另一方面,工作流程控制功能155为,在基于医疗工作者P1的确认结果以及/或者横卧判定模型MDL2的输出结果而判定为患者P2躺在诊视床装置130上的情况下,作为扫描工作流程的下一个步骤,使诊视床装置130的顶板133移动至旋转框架117内(开口160内)(步骤S114)。
如此,工作流程控制功能155为,在步骤S108中,在(i)患者P2自己报告躺在诊视床装置130上、以及(ii)医疗工作者P1远程确认患者P2躺在诊视床装置130上或者利用人工智能判定为患者P2躺在诊视床装置130上这两个条件满足的情况下,允许向扫描工作流程的下一个步骤S114转换,并执行该步骤S114的处理。
接着,工作流程控制功能155使用显示器142、扬声器145通知在架台装置110内患者P2应当采取的姿势、动作(暂时屏住呼吸等动作)、以及扫描部位(步骤S116)。
接着,工作流程控制功能155对应于患者P2的姿势而使显示器142移动(步骤S118)。例如,工作流程控制功能155根据患者P2的姿势使机械臂142a动作,由此使显示器142的画面移动到患者P2的视线前方。
接着,工作流程控制功能155使用显示器142、扬声器145来引导患者P2,以使患者P2自身采取在S116的处理中要求的姿势、动作,且如果做好扫描的准备则操作输入界面143(步骤S120)。
接着,工作流程控制功能155判定患者P2是否自己报告了扫描的准备完成(步骤S122)。例如,在患者P2操作了第1按钮143a的情况下,输入界面143将表示第1按钮143a被操作了的信号输出至处理电路150。
工作流程控制功能155为,在无法从输入界面143取得表示第1按钮143a被操作了的信号的情况下,判定为患者P2未报告扫描的准备完成的情况。在该情况下,工作流程控制功能155返回到S120的处理,继续引导患者P2如果扫描的准备完成则操作输入界面143。
另一方面,工作流程控制功能155为,在从输入界面143取得了表示第1按钮143a被操作了的信号的情况下,判定为患者P2报告了扫描的准备完成。在该情况下,工作流程控制功能155判定是否由远程的医疗工作者P1确认了患者P2的扫描准备完成(步骤S124)。
例如,假设医疗工作者P1观察显示于显示器13的CT室的图像、患者P2的生命信息,确认到患者P2正在采取在S116的处理中要求的姿势、动作。在该情况下,医疗工作者P1对终端装置10的输入界面12输入患者P2的扫描准备完成这样的确认结果。换言之,医疗工作者P1为,在确认到患者P2正在采取在S116的处理中要求的姿势、动作的情况下,对终端装置10的输入界面12输入允许向扫描工作流程的下一个步骤转换的信息。接收到该信息,终端装置10的发送控制功能23经由通信界面11,将表示患者P2的扫描准备完成这样的确认结果(允许向下一个步骤转换)的信息发送至X射线CT装置100。工作流程控制功能155为,在通信界面144从终端装置10接收到表示上述确认结果的信息的情况下,判定是否由远程的医疗工作者P1确认了患者P2的扫描准备完成。
工作流程控制功能155为,作为S124的处理,也可以利用人工智能来判定患者P2的扫描准备是否完成。例如,工作流程控制功能155为,对为了判定患者P2的姿势而预先学习了的机械学习的模型(以下,称为姿势判定模型)MDL3输入摄像机200的图像(即CT室内的图像),由此判定患者P2的姿势,并根据该判定出的患者P2的姿势与在S116的处理中要求的姿势是否相同,判定患者P2的扫描准备是否完成。姿势判定模型MDL3是“学习完成模型”的其他例子。
姿势判定模型MDL3例如与开闭判定模型MDL1、横卧判定模型MDL2同样,也可以是通过CNN等神经网络来安装的模型。姿势判定模型MDL3是基于示教数据进行了监督学习的模型,该示教数据是将表示学习对象的患者的姿势的正解的信息作为标签与该学习对象的患者躺在诊视床装置130上的CT室内的图像建立了对应的数据。该正解的信息例如也可以是将分别表示患者能够采取的多个姿势的概率作为要素而包含的多维矢量。具体而言,在患者能够采取的姿势为仰卧、俯卧、侧卧这三个种类的情况下,正解的信息称为将表示仰卧的概率、表示俯卧的概率和表示侧卧的概率作为要素的三维矢量。在将学习对象的患者躺在诊视床装置130上的CT室内的图像作为输入数据,将表示学习对象的患者的姿势的正解的信息作为输出数据时,示教数据也可以替换成将这些输入数据与输出数据组合而成的数据组。通过使用这样的示教数据对姿势判定模型MDL3进行学习,由此该姿势判定模型MDL3为,当被输入患者P2躺在诊视床装置130上的CT室内的图像时,会输出表示该患者P2的姿势的信息。
例如,工作流程控制功能155为,在姿势判定模型MDL3输出了表示仰卧的概率最高的矢量的情况下,判定为躺在诊视床装置130上的患者P2正在采取仰卧的姿势。然后,工作流程控制功能155为,当在S116的处理中要求的姿势为仰卧的姿势,并且根据患者P2的生命信息能够判定为患者P2正在进行在S116的处理中要求的动作的情况下,判定为患者P2的扫描准备完成,在并非如此的情况下,判定为患者P2的扫描准备未完成。
用于对姿势判定模型MDL3进行学习的示教数据,也可以是将表示学习对象的患者的姿势的正解的信息和X射线CT装置100的控制信息的双方作为标签与学习对象的患者躺在诊视床装置130上的CT室内的图像建立了对应的数据组。也可以代替X射线CT装置100的控制信息或者在此基础上,将生命信息作为标签与图像建立对应。
在该情况下,工作流程控制功能155为,对于姿势判定模型MDL3除了输入摄像机200的图像之外,还输入当前的X射线CT装置100的控制信息、当前的患者P2的生命信息,由此判定患者P2的姿势、动作。
工作流程控制功能155为,在基于医疗工作者P1的确认结果以及/或者姿势判定模型MDL3的输出结果而判定为患者P2的扫描准备未完成的情况下,返回到S116的处理,一边通知应当采取的姿势、动作、扫描部位等,一边引导患者P2如果扫描的准备完成则操作输入界面143。姿势判定模型MDL3的输出结果是“第2信息”的其他例子。
另一方面,工作流程控制功能155为,在基于医疗工作者P1的确认结果以及/或者姿势判定模型MDL3的输出结果而判定为患者P2的扫描准备完成的情况下,作为扫描工作流程的下一个步骤,允许执行扫描(步骤S126)。
如此,工作流程控制功能155为,在步骤S120中,在(i)患者P2自己报告扫描的准备完成、以及(ii)医疗工作者P1远程确认患者P2的扫描准备完成或者利用人工智能判定为患者P2的扫描准备完成这两个条件满足的情况下,允许向扫描工作流程的下一个步骤S126转换,并执行该步骤S126的处理。
当工作流程控制功能155允许执行扫描时,控制装置118、前处理功能152、重构处理功能153以及图像处理功能154进行用于扫描的各种处理。具体而言,控制装置118一边使旋转框架117旋转或者使架台装置110倾斜,一边进行正式扫描摄影或者定位扫描摄影。前处理功能152为,当通过正式扫描摄影或者定位扫描摄影而DAS116取得检测数据时,对该检测数据进行前处理,并生成投影数据。重构处理功能153对由前处理功能152生成的投影数据进行重构处理,并生成CT图像。图像处理功能154将由重构处理功能153生成的CT图像转换成三维图像、断面图像数据。然后,处理电路150的某一个功能将CT图像的三维图像、断面图像数据经由通信界面144发送至终端装置10或者显示于显示器142。
接着,工作流程控制功能155基于扫描工作流程判定是否继续扫描(步骤S128)。例如,工作流程控制功能155为,当在S126的处理中进行了定位扫描摄影的情况下,接下来进行正式扫描摄影,因此判定为继续扫描。即使在S126的处理中进行了正式扫描摄影的情况下,有时也对同一部位多次进行摄影或者对多个部位进行摄影。因此,工作流程控制功能155为,在按照预先计划的扫描工作流程、作为正式扫描摄影而多次对患者P2进行摄影的情况下,也可以判定为继续扫描。
工作流程控制功能155在判定为继续扫描的情况下,返回到S116的处理,重新通知在接下来的扫描中患者P2应当采取的姿势、动作、扫描部位,并且对应于患者的姿势使显示器142移动。
另一方面,工作流程控制功能155在判定为不继续扫描的情况下,使诊视床装置130的顶板133移动到旋转框架117之外(开口160之外)(步骤S130)。由此,本流程图的处理结束。
图7以及图8是示意性地表示对应于患者P2的姿势使显示器142移动的情况的图。如图7所示,例如在患者P2以横向的姿势横躺在顶板133上时,在下一个扫描部位为“胸部”的情况下,工作流程控制功能155使显示器142显示下一个扫描部位为“胸部”,为了扫描该“胸部”而患者P2应当采取的姿势为“仰卧”的情况。此时,如图8所示,工作流程控制功能155对应于患者P2的姿势从“横向”向“仰卧”转变的情况而使机械臂142a动作,使显示器142的画面移动至采取“仰卧”的姿势的患者P2的视线前方(面部前方)。
假设,在患者P2根据显示于显示器142的指示而成为“仰卧”,并执行了扫描之后,进一步预定有“腹部”的扫描。在该情况下,工作流程控制功能155使显示器142显示在下一个扫描中患者P2应当采取的姿势为“俯卧”,以该姿势扫描的部位为“腹部”。如此,患者P2能够一边理解自身接下来应当采取的姿势、接下来扫描的部位,一边在顶板133上不断地改变姿势。
[X射线CT装置的紧急停止流程]
以下,对用于使实施方式的X射线CT装置100紧急停止的一系列流程图进行说明。图9是表示实施方式的X射线CT装置100紧急停止时的一系列处理流程的流程图。
首先,工作流程控制功能155判定患者P2是否为了使X射线CT装置100紧急停止而操作了输入界面143的第2按钮143b(步骤S200)。第2按钮143b的操作是“规定的指示”的一例。
为了抑制按错等误操作,例如,工作流程控制功能155为,可以在第2按钮143b被操作规定次数以上的情况下,判定为患者P2以紧急停止目的而操作了第2按钮143b,也可以在第2按钮143b被持续规定时间以上地连续操作的情况下,判定为患者P2以紧急停止目的而操作了第2按钮143b。工作流程控制功能155为,也可以在第1按钮143a与第2按钮143b被同时操作了的情况下,判定为患者P2以紧急停止目的而操作了第2按钮143b。
工作流程控制功能155为,在患者P2未以紧急停止目的而操作输入界面143的第2按钮143b的情况下,进一步判定是否由远程的医疗工作者P1判断为需要使X射线CT装置100紧急停止(步骤S202)。
例如,假设,医疗工作者P1观察显示于显示器13的CT室的图像,判断为患者P2出现呕吐、痉挛这样的副作用的症状,需要紧急停止。在该情况下,医疗工作者P1对终端装置10的输入界面12输入需要紧急停止这样的判断结果。接收到该判断结果,终端装置10的发送控制功能23经由通信界面11将表示需要紧急停止这样的判断结果的信息发送至X射线CT装置100。工作流程控制功能155为,在通信界面144从终端装置10接收到表示上述判断结果的信息的情况下,判定为由远程的医疗工作者P1判断为需要使X射线CT装置100紧急停止。副作用的症状是“规定的状态”的一例。
工作流程控制功能155为,作为S202的处理,也可以利用人工智能来判定是否需要使X射线CT装置100紧急停止。例如,工作流程控制功能155为,对于为了判定X射线CT装置100的紧急停止的必要性而预先学习了的机械学习的模型(以下,称为紧急停止判定模型)MDL4输入摄像机200的图像(即CT室内的图像),由此判定是否需要X射线CT装置100的紧急停止。
紧急停止判定模型MDL4例如与开闭判定模型MDL1、横卧判定模型MDL2、姿势判定模型MDL3同样,也可以是通过CNN等神经网络来安装的模型。紧急停止判定模型MDL4是基于示教数据进行了监督学习的模型,该示教数据是将表示学习对象的患者的症状(尤其是与CT检查的副作用相关的症状)的正解的信息作为标签与该对学习对象的患者躺在诊视床装置130上的CT室内的图像建立了对应的数据。该正解的信息例如也可以是将分别表示患者能够取得的多个症状(也可以包含正常这样的状态)的概率作为要素而包含的多维矢量。在将学习对象的患者躺在诊视床装置130上的CT室内的图像作为输入数据,将表示学习对象的患者的症状的正解的信息作为输出数据时,示教数据也可以替换成将这些输入数据与输出数据组合而成的数据组。通过使用这样的示教数据对紧急停止判定模型MDL4进行学习,由此该紧急停止判定模型MDL4为,当被输入患者P2躺在诊视床装置130上的CT室内的图像时,会输出表示该患者P2的症状的信息。
用于对紧急停止判定模型MDL4进行学习的示教数据,也可以是将表示学习对象的患者的症状的正解的信息和学习对象的患者的生命信息的双方作为标签与学习对象的患者躺在诊视床装置130上的CT室内的图像建立了对应的数据组。
在该情况下,工作流程控制功能155为,对于紧急停止判定模型MDL4除了输入摄像机200的图像之外还输入当前的患者P2的生命信息,由此判定患者P2的症状。
工作流程控制功能155为,在基于医疗工作者P1的判断结果以及/或者紧急停止判定模型MDL4的输出结果而判定为需要使X射线CT装置100紧急停止的情况下,使扫描工作流程的当前步骤的控制(处理)停止(步骤S204)。例如,工作流程控制功能155为,当在步骤S126的扫描执行处理中判定为需要使X射线CT装置100紧急停止的情况下,中止扫描的执行。
如此,工作流程控制功能155为,在(i)患者P2对输入界面143的第2按钮143b进行操作而请求紧急停止、或者(ii)医疗工作者P1远程判断为需要紧急停止或者利用人工智能判定为需要紧急停止中的至少任一方的条件满足的情况下,使扫描工作流程的当前步骤的控制停止。
接着,工作流程控制功能155判定诊视床装置130的顶板133是否存在于旋转框架117内(开口160内)(步骤S206),如果顶板133在旋转框架117内,则使顶板133朝旋转框架117之外(开口160之外)移动(步骤S208)。由此,本流程图的处理结束。
根据以上说明的实施方式,医用图像诊断系统1的X射线CT装置100(医用图像摄像装置的一例)具备处理电路150,该处理电路150对用于扫描作为被检体的患者P2的扫描工作流程所包含的多个步骤各自的转换进行控制。处理电路150为,当在扫描工作流程所包含的多个步骤中的某一个对象步骤中,患者P2为了报告自身的准备状况而操作了输入界面143的第1按钮143a的情况下,从输入界面143取得表示该第1按钮143a被操作了的信号(第1信息的一例)。并且,处理电路150为,当在对象步骤中,医疗工作者P1利用终端装置10远程确认了患者P2的准备状况的情况下,从终端装置10取得该医疗工作者P1的确认结果(第2信息的一例),或者在通过人工智能判定出患者P2的准备状况的情况下,取得该人工智能的判定结果(第2信息的其他例子)。然后,处理电路150判定(i)患者P2自己报告检查准备完成、以及(ii)远程的医疗工作者P1确认患者P2准备完成(或者通过人工智能判定为患者P2准备完成)的双方的条件是否满足,在(i)以及(ii)这两个条件满足的情况下,对向扫描工作流程的下一个步骤转换进行控制。由此,即使医生、技师这样的医疗工作者P1不在X射线CT装置100附近,也能够安全且无损便利性地检查患者P2。
(实施方式的变形例)
以下,对实施方式的变形例进行说明。在上述实施方式中,说明了工作流程控制功能155通过使机械臂142a动作来使显示器142的画面移动到患者P2的视线前方的情况,但并不限定于此。例如,工作流程控制功能155也可以代替控制机械臂142a而控制投影仪190。
图10是表示实施方式的投影仪190的一例的图。例如,投影仪190也可以安装于顶板133等。例如,工作流程控制功能155根据顶板133相对于架台装置110的相对位置,将投影仪190的图像的焦点位置(投影位置)调整到架台装置110的开口160的壁面160a或者CT室的顶棚中的任一个。
图11是用于说明焦点位置的调整方法的图。例如,将旋转框架117(开口160)的外侧与内侧的边界设为Zth,将CT室的顶棚的位置设为Y1,将架台装置110的开口160的壁面160a的位置设为Y2。在该情况下,工作流程控制功能155为,在顶板133的位置为边界Zth以下的情况下,即,在顶板133存在于旋转框架117(开口160)外侧的情况下,将投影仪190的焦点位置调整到Y1。另一方面,工作流程控制功能155为,在顶板133的位置超过边界Zth的情况下,即,在顶板133存在于旋转框架117(开口160)内侧的情况下,将投影仪190的焦点位置调整到Y2。由此,对于横躺在顶板133上的患者P2来说,能够适当地通知在扫描时应当采取的姿势、扫描部位。
在上述实施方式中,说明了X射线CT装置100的处理电路150具备工作流程控制功能155的情况,但并不限定于此。例如,也可以是医疗工作者P1能够利用的终端装置10的处理电路20具备工作流程控制功能155。
图12是表示实施方式的终端装置10的其他构成例的图。如图所示,终端装置10的处理电路20除了具备上述取得功能21、显示控制功能22以及发送控制功能23之外,还具备X射线CT装置100的处理电路20所具有的工作流程控制功能155。
例如,也可以为,终端装置10侧的工作流程控制功能155在S102、S108、S120这样的步骤中,判定(i)患者P2自己报告检查的准备完成、以及(ii)远程的医疗工作者P1确认患者P2的准备完成(或者通过人工智能判定为患者P2的准备完成)的双方的条件是否满足,在(i)以及(ii)这两个条件满足的情况下,控制或者允许向扫描工作流程的下一个步骤转换。
也可以代替终端装置10的处理电路20,而架台装置110的控制装置118具有工作流程控制功能155。即,也可以为,架台装置110的控制装置118判定(i)患者P2自己报告检查的准备完成、以及(ii)远程的医疗工作者P1确认患者P2的准备完成(或者通过人工智能判定为患者P2的准备完成)的双方的条件是否满足,在(i)以及(ii)这两个条件满足的情况下,控制或者允许向扫描工作流程的下一个步骤转换。
在上述实施方式中,代替医疗工作者P1确认患者P2D准备完成的情况,而将通过CNN等安装的机械学习模型判定患者P2的准备完成的情况设为用于向下一个步骤转换的条件(ii),但并不限定于此。
例如,也可以代替患者P2自己报告检查的准备完成的情况,而将通过CNN等安装的机械学习模型(上述开闭判定模型MDL1、横卧判定模型MDL2或者姿势判定模型MDL3)判定患者P2的准备完成的情况设为用于向下一个步骤转换的条件(i)。即,工作流程控制功能155也可以判定(i)通过人工智能判定为患者P2的准备完成、以及(ii)远程的医疗工作者P1确认患者P2的准备完成的双方的条件是否满足,在(i)以及(ii)这两个条件满足的情况下,控制或者允许向扫描工作流程的下一个步骤转换。如此,即使不与患者P2对话,也可以控制扫描工作流程的步骤的转换。这种变形例中的表示人工智能的判定结果的信息是“第1信息”的其他例子。
对本发明的几个实施方式进行了说明,这些实施方式是作为例子而提示的,并不意图对发明的范围进行限定。这些实施方式能够以其他的各种方式加以实施,在不脱离发明的主旨的范围内能够进行各种省略、置换、变更。这些实施方式及其变形包括于发明的范围及主旨中,并且包括于专利请求范围所记载的发明和与其等同的范围中。
符号的说明
1:医用图像诊断系统;10:终端装置;11:通信界面;12:输入界面;13:显示器;14:存储器;20:处理电路;21:取得功能;22:显示控制功能;23:发送控制功能;100:X射线CT装置;110:架台装置;130:诊视床装置;140:控制台装置;141:存储器;142:显示器;142a:机械臂;143:输入界面;143a:第1按钮;143b:第2按钮;144:通信界面;145:扬声器;150:处理电路;151:系统控制功能;152:前处理功能;153:重构处理功能;154:图像处理功能;155:工作流程控制功能;190:投影仪。
- 医用图像诊断系统及方法、输入装置以及显示装置
- 医用图像诊断系统以及医用图像诊断装置控制方法