一种基于CCD相机的PCB线路板精准定位机构及定位方法
文献发布时间:2023-06-19 13:48:08
【技术领域】
本发明属于PCB板制造设备技术领域,特别是涉及一种基于CCD相机的PCB线路板精准定位机构。
【背景技术】
目前,PCB板的制作工艺非常复杂,其中有一个工艺环节为钻孔,在钻孔前,为了保护PCB板表面不受破坏和损伤,且防止钻孔过程中将PCB板钻开裂或变形,因此,现有工艺一般会将PCB板放置在一个底板上,然后再在PCB板表面覆盖一个盖板形成一个组合板材,保护PCB板表面,为了保障钻孔位置的精准度,需要把底板、PCB板以及盖板采用定位PIN针将其组合成一个整体保障其位置。然后进入钻孔设备进行钻孔加工,加工完成后,由于后续的加工是针对PCB板进行的,因此,只需要中间的PCB板,因此还需要将底板、PCB板以及盖板进行拆解,将定位PIN针从组合板材中取出,该过程称为下PIN操作,以便于进行后续的流水线加工。
目前PCB工厂没有给线路板定位孔做预定位的机构,大部分预定位是以线路板板边做定位,误差在1mm左右,在需要精准时误差太大,不满足高精度生产要求。
因此,有必要提供一种新的基于CCD相机的PCB线路板精准定位机构及定位方法来解决上述问题。
【发明内容】
本发明的主要目的之一在于提供一种基于CCD相机的PCB线路板精准定位机构,能够精准的对各种不同规格大小的PCB线路板进行精准的定位,满足高精度生产要求。
本发明通过如下技术方案实现上述目的:一种基于CCD相机的PCB线路板精准定位机构,其包括相对设置的两个定位单元,所述定位单元包括XY轴移载驱动机构、设置在所述XY轴移载驱动机构活动末端的CCD相机和顶针机构。
进一步的,所述定位单元包括第一电机、受所述第一电机驱动进行X轴运动的第一支撑板、固定在所述第一支撑板上的第二电机、受所述第二电机驱动进行Y轴运动的第二支撑板、固定在所述第二支撑板上的顶升气缸、受所述顶升气缸驱动进行上下运动的定位顶针、固定在所述第二支撑板上且位于所述定位顶针正上方的CCD相机。
进一步的,所述第一支撑板通过滑块活动设置在一对滑轨上;所述两个定位单元共用同一对所述滑轨。
进一步的,所述定位单元还包括一端与所述第一电机旋转端连接的丝杆,所述第一支撑板的底部设置有与所述丝杆配合传动的螺母套。
进一步的,所述丝杆的另一端旋转设置在一个轴承座上。
进一步的,所述第二支撑板上位于所述CCD相机的下方位置设置有光源板。
进一步的,所述定位顶针穿过所述光源板。
进一步的,所述两个定位单元中,其中一个定位单元在X轴向上的运动行程比另一个定位单元在X轴向上的运动行程长。
本发明的另一目的在于提供一种PCB线路板精准定位方法,其包括在PCB板的两侧分别利用CCD相机对PCB板拍照,获取PCB板上两侧的定位孔位置,然后利用两个XY轴移载驱动机构分别独立驱动一个定位顶针移动至对应的定位孔位置下方,此时,PCB板两侧的定位孔中均插入有定位顶针;再利用两个所述XY轴移载驱动机构共同作用,通过所述定位顶针带着PCB板移动至设定位置,实现精准定位。
与现有技术相比,本发明一种基于CCD相机的PCB线路板精准定位机构及定位方法的有益效果在于:利用CCD相机寻找PCB板上的定位孔,设置两个定位单元,且两个定位单元都有独立的伺服电机驱动控制,定位精度高,误差可控制在0.05mm范围内,为后续PCB板的加工叠板上PIN等工序奠定了重要的位置精度基础,满足了高精度生产需求。
【附图说明】
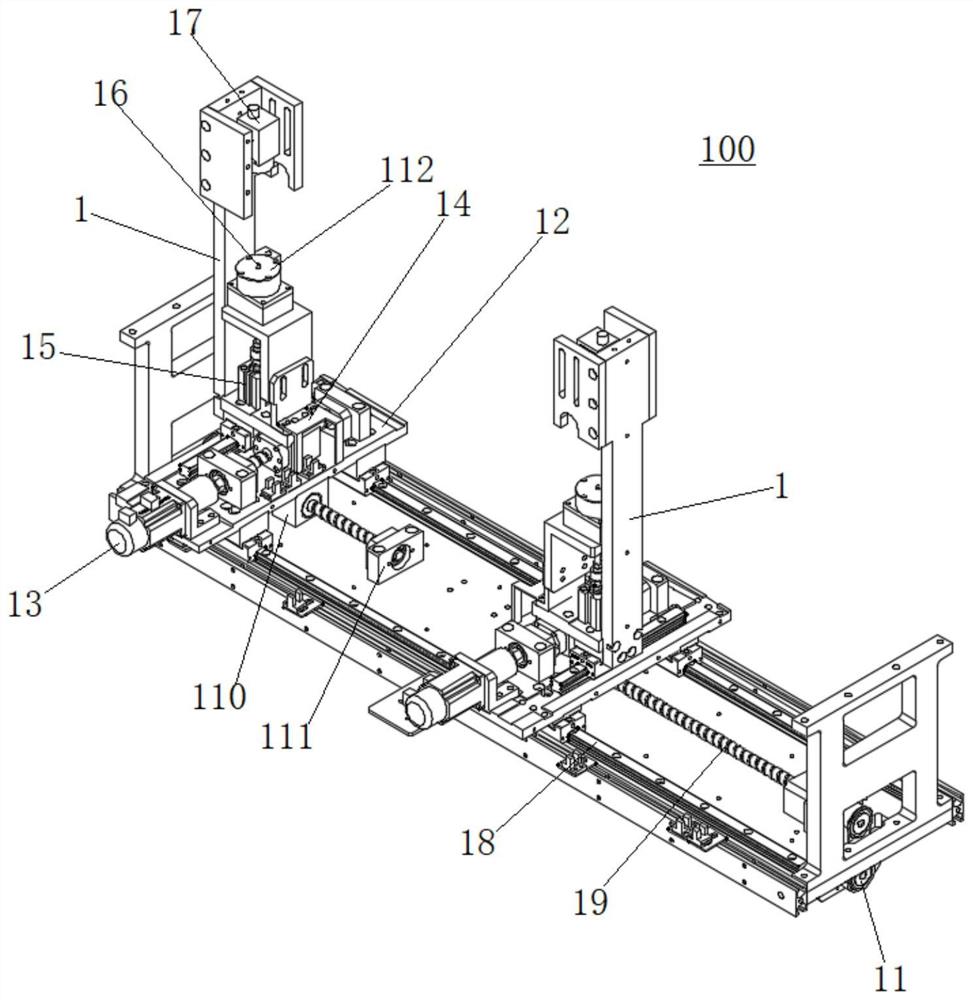
图1为本发明实施例的立体结构示意图;
图2为本发明实施例的主视结构示意图;
图中数字表示:
100基于CCD相机的PCB线路板精准定位机构;
1定位单元,11第一电机,12第一支撑板,13第二电机,14第二支撑板,15顶升气缸,16定位顶针,17CCD相机,18滑轨,19丝杆,110螺母套,111轴承座,112光源板。
【具体实施方式】
实施例一:
请参照图1-图2,本实施例一种基于CCD相机的PCB线路板精准定位机构100,其包括相对设置的两个定位单元1,两个定位单元1分别用于寻找PCB板上两侧对应的定位孔,并将定位针插入对应的定位孔中,然后将PCB板整体移动至设定位置,实现精准定位。定位单元1中设置有一个CCD相机和一个顶针机构,CCD相机和顶针机构设置在一个XY轴移载驱动机构上,利用XY轴移载驱动机构驱动CCD相机移动寻找PCB板上的定位孔,然后利用顶针机构驱动顶针插入定位孔中,再利用XY轴移载驱动机构将PCB板移动至设定位置,完成精准定位。
所述定位单元1包括第一电机11、受第一电机11驱动进行X轴运动的第一支撑板12、固定在第一支撑板12上的第二电机13、受第二电机13驱动进行Y轴运动的第二支撑板14、固定在第二支撑板14上的顶升气缸15、受顶升气缸15驱动进行上下运动的定位顶针16、固定在第二支撑板14上且位于定位顶针16正上方的CCD相机17。
第一支撑板12通过滑块活动设置在一对滑轨18上。两个定位单元1共用同一对滑轨18。
定位单元1还包括一端与第一电机11旋转端连接的丝杆19,第一支撑板12的底部设置有与丝杆19配合传动的螺母套110。丝杆19的另一端旋转设置在一个轴承座111上。
第二支撑板14上位于CCD相机17的下方位置还设置有光源板112,定位顶针16穿过光源板112。
两个定位单元1中,其中一个定位单元1在X轴向上的运动行程比另一个定位单元1在X轴向上的运动行程长。运动行程长的定位单元1可用于适用不同规格大小的PCB板的精准定位,实现自动调节与适应,提高通用性。
本实施例还提供了一种PCB线路板精准定位方法,其包括在PCB板的两侧分别利用CCD相机对PCB板拍照,获取PCB板上两侧的定位孔位置,然后利用两个XY轴移载驱动机构分别独立驱动一个定位顶针移动至对应的定位孔位置下方,此时,PCB板两侧的定位孔中均插入有定位顶针;再利用两个所述XY轴移载驱动机构共同作用,通过所述定位顶针带着PCB板移动至设定位置,实现精准定位。
本实施例一种基于CCD相机的PCB线路板精准定位机构100的工作原理为:PCB线路板进入定位机构中后,两个定位单元1中的光源板112发光,CCD相机17拍照找到PCB线路板上的定位孔,然后利用第一电机11与第二电机13移动,将定位顶针16移动至定位孔正下方,顶升气缸15动作,驱动定位顶针16上升插入PCB线路板上的定位孔中,然后两个定位单元1中的第一电机11同时动作,将PCB线路板移动至设定的位置,实现PCB板的精准预定位。
本实施例一种基于CCD相机的PCB线路板精准定位机构100,利用CCD相机寻找PCB板上的定位孔,设置两个定位单元,且两个定位单元都有独立的伺服电机驱动控制,定位精度高,误差可控制在0.05mm范围内,为后续PCB板的加工叠板上PIN等工序奠定了重要的位置精度基础,满足了高精度生产需求。
以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。