一种基于深度学习的缺陷检测3D打印装置及方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及3D打印领域,特别是涉及一种基于深度学习的缺陷检测3D打印装置及方法。
背景技术
如今的3D打印技术愈加成熟,3D打印涉及的领域日渐扩大,市场需求越来越大。但在3D打印过程中还是会出现打印出来的模型内部细节存在缺陷,模糊等现象。导致只能重新打印,甚至在应用模型时才发现缺陷。严重浪费时间及打印成本。因此能够及时检测3D打印模型缺陷的技术意义重大。
目前,在缺陷模型检测方面比较常用的有两种解决方法,其一是用X射线源模块直接扫描检测成品缺陷情况,把采集到的数据传给计算机进行处理,计算机把3D打印前的理想模型图与打印后所获得的成品图两图信息进行对比,从而判断是否出现缺陷;其二是通过机器臂让相机与喷头固定根据打印轨迹的法矢量,跟踪喷头移动采集打印实时图像。
用X射线进行缺陷扫描,技术繁杂,过于浪费能源,成本相对较高。且在打印后才能扫描缺陷,同样不能解决及时发现缺陷的问题,耗费大量时间与材料。而对于通过机械臂将相机与喷头固定的方法,由于相机最低端会比打印喷头低,在同时打印多个模型时很容易造成相机被模型遮挡,以至于不能全程检测到模型的打印。而且,市场上常用的打印机都是盒状,而这种需要机械臂的技术并不适用于市场上的大部分3D打印机。再者,此类相机需要长时间不断旋转来跟随打印喷头运动,具有一定的危险性。
发明内容
针对现有技术中存在的技术问题,为及时解决3D打印过程中模型出现缺陷并及时报警,本发明的目的之一是:提出一种基于深度学习的缺陷检测3D打印装置,为3D打印行业提供一种新的缺陷检测装置;
本发明的目的之二是:提出一种基于深度学习的缺陷检测方法,为3D打印行业提供一种新的缺陷检测技术。
为了达到上述目的,本发明采用如下技术方案:
一种基于深度学习的缺陷检测3D打印装置,包括机架和打印机喷头,机架上设有对准3D打印机喷头的第一图像采集装置和第二图像采集装置,第一图像采集装置与第二图像采集装置呈相对设置,第一图像采集装置与第二图像采集装置与3D打印机喷头始终位于同一水平面上,第一图像采集装置和第二图像采集装置与带有卷积神经网络的存储器信号连接,存储器与控制器和报警器信号连接。
进一步,机架设有用于放置模型的模型座,模型座设有升降装置,3D打印机喷头设有平面移动装置,模型座及其升降装置设置于平面移动装置的下方,第一图像采集装置和第二图像采集装置均与平面移动装置位于同一水平面上。
进一步,第一图像采集装置设有第一轨道,第一图像采集装置能够沿第一轨道运动,第二图像采集装置设有第二轨道,第二图像采集装置能够沿第二轨道运动,第一轨道和第二轨道围绕3D打印模型外围设置。
进一步,第一图像采集装置和第二图像采集装置均分别设有转动装置,第一图像采集装置和第二图像采集装置转动的角度在0~90°之间。
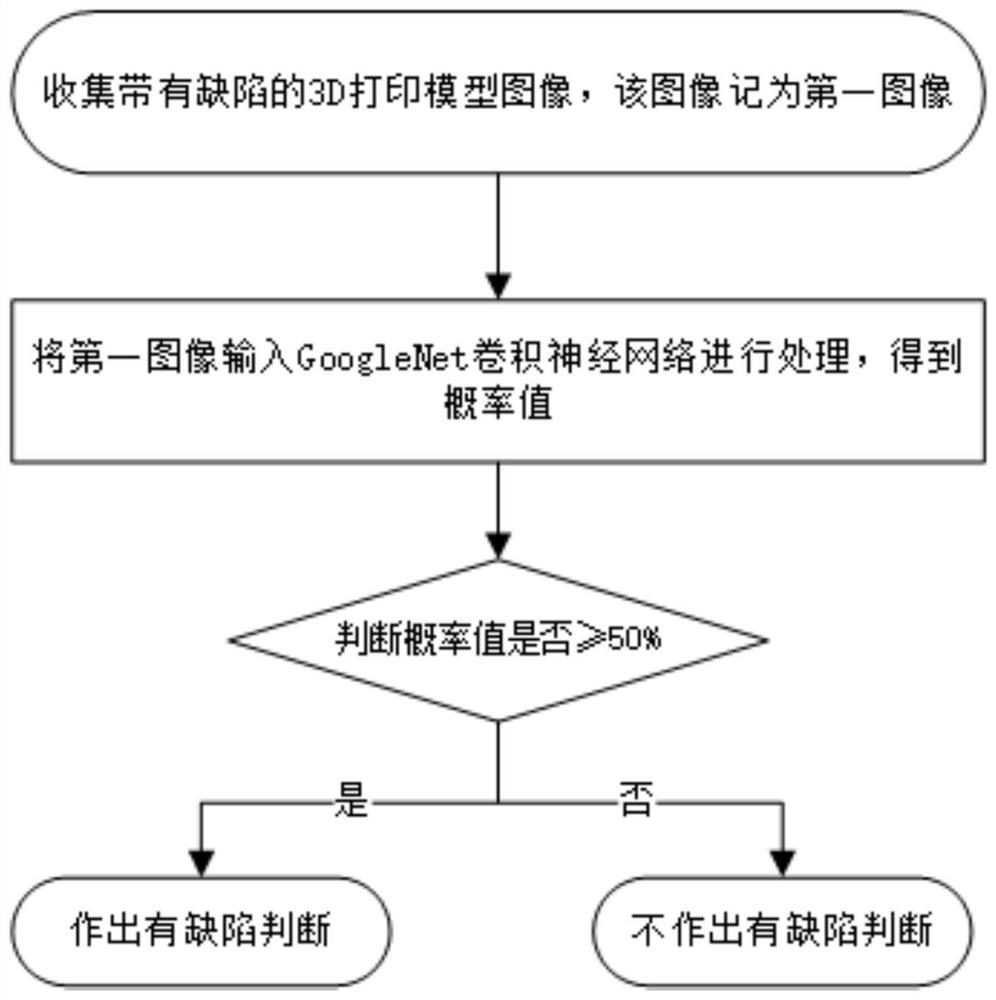
一种基于深度学习的缺陷检测方法,包括如下步骤,
步骤一、首先,使用降采样的训练3D打印模型图像对GoogleNet卷积神经网络进行训练;
步骤二、获取3D打印模型的图像,并将该图像记为第一图像,将得到的第一图像进行降采样,通过降采样降低第一图像的数据量,将降采样处理后的图像记为第二图像;
步骤三、从第二图像获取单元,用于将第二图像输入GoogleNet卷积神经网络的inception模块中进行处理,并将模块中的卷积层的输出输入到激活函数单元中进行处理,在经过inception模块串处理后得到多维特征图,并将该多维特征图记为第三图像;
步骤四、将第三图像输入至回归函数,得到初算概率值,将初算概率值输入至回归函数,得到最终概率值;
步骤五、最终概率值如果大于50%,则做出有缺陷判断,最终概率值如果小于50%,则不做出有缺陷判断。
进一步,对图像采用最近邻插值降采样得到分辨率较低的图像。
进一步,GoogleNet由多个inception模块串联组成,每个inception包含四个分支,第一个分支是1×1的卷积;第二个是1×1的卷积连着一个3×3的卷积;第三个分支是1×1的卷积连着一个5×5的卷积;最后一个分支是先进行3×3的最大池化处理,然后再使用1×1的卷积;最后通过聚合操作在输出通道上将四个分支的结果进行合并;最大池化处理,把图像划分成多个相同大小的矩形,对其进行最大值提取,作为此矩形的代表取代原来的图像像素矩形。
进一步,将降采样后的3D打印模型图像输入卷积神经网络的卷积层进行卷积处理,随机生成一个四维的卷积核对图像进行卷积运算,得到多个特征图,每个特征图提取一种特征,卷积层的表达式;
S(i,j)=(I*K)(i,j)=∑
式中I表示卷积图像,m,n代表卷积图像的大小,K表示卷积核,i,j代表卷积核的大小。
进一步,本卷积神经网络采用线性整流作为神经元的激活函数,在数据经过所有的隐层运算后输入激活函数,如函数(2),即将来自上一层神经网络的输入向量进行处理,随后把处理完的数据(3)输入下一层神经元;
f(x)=max(0,x), (2)
max(0,w
进一步,算法模型的训练是通过利用损失函数还衡量模型是否已经收敛,判断预防模型的预测值与正实值是否一致,如果未收敛,通过计算损失函数的梯度,沿着梯度下降的方法不断调整网络参数的值,重新计算算法的输出,周而复始,不断迭代直到模型收敛,损失函数达到一个极小值为止,
如softmax函数(4)所示;
其中,N表示类别数,a表示全连接层的输出向量,α
当softmax输出向量的S的第j个值,传送到损失函数中处理,
其中,s
总的说来,本发明具有如下优点:
一种基于深度学习的缺陷检测3D打印装置,包括机架和打印机喷头,机架上设有对准3D打印机喷头的第一图像采集装置和第二图像采集装置,第一图像采集装置与第二图像采集装置呈相对设置,第一图像采集装置与第二图像采集装置与3D打印机喷头始终位于同一水平面上,第一图像采集装置和第二图像采集装置与带有卷积神经网络的存储器信号连接,存储器与控制器和报警器信号连接。本3D打印装置为一种基于深度学习的缺陷检测方法提供了硬件基础。
1、本方法不需要用到X射线来扫描,减少能源损耗,符合绿色环保意识。
2、本方法能及时发现模板缺陷,及时停止打印,节约时间与大量的资源。3、一种基于深度学习的缺陷检测3D打印装置使用两个对角位置的相机,旋转角度不需要180°,也不需要长时间跟踪移动,节省电源消耗。4、一种基于深度学习的缺陷检测3D打印装置不需要另外用到复杂的机械结构,能适用于市场上各种3D打印机。
附图说明
图1为本发明一种基于深度学习的缺陷检测3D打印装置的结构示意图。
图2为本发明一种基于深度学习的缺陷检测3D打印装置的另外一个角度的结构示意图。
图3为本发明一种基于深度学习的缺陷检测3D打印装置的另外一个角度的结构示意图。
图4为本发明一种基于深度学习的缺陷检测方法的流程图。
图5为本发明一种基于深度学习的缺陷检测方法的最大池化处理流程图。
其中图1至图3中包括有:
1——机架、2——打印机喷头、3——第一图像采集装置、4——第二图像采集装置、5——报警器、6——模型座、7——升降装置、8——平面移动装置。
具体实施方式
下面来对本发明做进一步详细的说明。
实施例1、
如图1至图3所示,一种基于深度学习的缺陷检测3D打印装置,包括机架和打印机喷头,机架上设有对准3D打印机喷头的第一图像采集装置和第二图像采集装置,第一图像采集装置与第二图像采集装置呈相对设置,第一图像采集装置与第二图像采集装置与3D打印机喷头始终位于同一水平面上,第一图像采集装置和第二图像采集装置与带有卷积神经网络的存储器信号连接,存储器与控制器和报警器信号连接。第一图像采集装置和第二图像采集装置均为CCD相机。
机架设有用于放置模型的模型座,模型座设有升降装置,3D打印机喷头设有平面移动装置,模型座及其升降装置设置于平面移动装置的下方,第一图像采集装置和第二图像采集装置均与平面移动装置位于同一水平面上。
第一图像采集装置和第二图像采集装置均分别设有转动装置,第一图像采集装置和第二图像采集装置转动的角度在0~90°之间。
如图4所示,一种基于深度学习的缺陷检测方法,包括如下步骤,
步骤一、首先,使用降采样的训练3D打印模型图像对GoogleNet卷积神经网络进行训练;
步骤二、获取3D打印模型的图像,并将该图像记为第一图像,将得到的第一图像进行降采样,通过降采样降低第一图像的数据量,将降采样处理后的图像记为第二图像;
步骤三、从第二图像获取单元,用于将第二图像输入GoogleNet卷积神经网络的inception模块中进行处理,并将模块中的卷积层的输出输入到激活函数单元中进行处理,在经过inception模块串处理后得到多维特征图,并将该多维特征图记为第三图像;
步骤四、将第三图像输入至回归函数,得到初算概率值,将初算概率值输入至回归函数,得到最终概率值;
步骤五、最终概率值如果大于50%,则做出有缺陷判断,最终概率值如果小于50%,则不做出有缺陷判断。
对图像采用最近邻插值降采样得到分辨率较低的图像。降采样使图像的尺寸变小,算法简单速度快,且不会产生一些主观臆造的数据,减少数据处理的复杂程度,缩短后期计算时间,并且原图与缩放后图像之间的旋转角度差异不变,只是平移变量发生相应比例的改变,且卷积神经网络具有平移,尺度不变性。
如图5所示,GoogleNet由多个inception模块串联组成,每个inception包含四个分支,第一个分支是1×1的卷积;第二个是1×1的卷积连着一个3×3的卷积;第三个分支是1×1的卷积连着一个5×5的卷积;最后一个分支是先进行3×3的最大池化处理,然后再使用1×1的卷积;最后通过聚合操作在输出通道上将四个分支的结果进行合并;最大池化处理,把图像划分成多个相同大小的矩形,对其进行最大值提取,作为此矩形的代表取代原来的图像像素矩形。此网络与传统的深度学习网络相比,能得到不同尺度的特征,使得最后判断分类时更加准确。池化可以使得图像的分辨率降低,特征图数目不变。除了特征维数得到降低之外,对位移、缩放、扭曲的鲁棒性也有一定程度的增强。同时由于不断地减小数据的空间大小,因此参数的数量和计算量也会下降,这在一定程度上也控制了过拟合。
将降采样后的3D打印模型图像输入卷积神经网络的卷积层进行卷积处理,随机生成一个四维的卷积核对图像进行卷积运算,得到多个特征图,每个特征图提取一种特征,卷积层的表达式;
S(i,j)=(I*K)(i,j)=∑
式中I表示卷积图像,m,n代表卷积图像的大小,K表示卷积核,i,j代表卷积核的大小。
本卷积神经网络采用线性整流作为神经元的激活函数,在数据经过所有的隐层运算后输入激活函数,如函数(2),即将来自上一层神经网络的输入向量进行处理,随后把处理完的数据(3)输入下一层神经元;
f(x)=max(0,x), (2)
max(0,w
采用线性函数做为激活函数不仅计算速度快,还能解决非线性函数无法解决的梯度消失问题。而且此线性函数收敛速度也远快与sigmoid和tanh两类非线性函数的收敛速度。
算法模型的训练是通过利用损失函数还衡量模型是否已经收敛,判断预防模型的预测值与正实值是否一致,如果未收敛,通过计算损失函数的梯度,沿着梯度下降的方法不断调整网络参数的值,重新计算算法的输出,周而复始,不断迭代直到模型收敛,损失函数达到一个极小值为止,
如softmax函数(4)所示;
其中,N表示类别数,a表示全连接层的输出向量,a
当softmax输出向量的S的第j个值,传送到损失函数中处理,
其中,s
一种基于深度学习的缺陷检测3D打印装置,包括机架和打印机喷头,机架上设有对准3D打印机喷头的第一图像采集装置和第二图像采集装置,第一图像采集装置与第二图像采集装置呈相对设置,第一图像采集装置与第二图像采集装置与3D打印机喷头始终位于同一水平面上,第一图像采集装置和第二图像采集装置与带有卷积神经网络的存储器信号连接,存储器与控制器和报警器信号连接。本3D打印装置为一种基于深度学习的缺陷检测方法提供了硬件基础。
1、一种基于深度学习的缺陷检测方法不需要用到X射线来扫描,减少能源损耗,符合绿色环保意识。2、一种基于深度学习的缺陷检测方法能及时发现模板缺陷,及时停止打印,节约时间与大量的资源。3、一种基于深度学习的缺陷检测3D打印装置使用两个对角位置的相机,旋转角度不需要180°,也不需要长时间跟踪移动,节省电源消耗。4、一种基于深度学习的缺陷检测3D打印装置不需要另外用到复杂的机械结构,能适用于市场上各种3D打印机。
本发明所示的一种基于深度学习的缺陷检测3D打印机装置及方法,以解决3D打印机打印过程出现缺陷模型存在问题为导向,提出基于GoogleNet卷积神经网络的3D打印模型缺陷检测方法,通过有缺陷的3D打印模型图片对网络进行训练,记录网络层的参数,再把3D打印过程中的模型图片输入网络层中运算,由运算得出的概率判断此待检测的3D打印模型是否有缺陷。此外,由于卷积神经网络的池化处理使得待检测目标具有尺度、平移、旋转不变性,归一化减少环境对检测的影响,提高了缺陷3D打印模型的鲁棒性,本发明对于处理实际模型打印过程中出现抽丝、缺料、变形、模型没粘牢移位导致打印错误等问题具有重大意义。本文还提出在降采样下再进行打印模型图像特征提取处理,大大缩短识别所需时间,克服了高分辨率图像数据处理复杂、检测慢、消耗内存等问题,为打印模型在线检测提供一种高效的检测方法。而本发明将各种算法融合,达到更好的检测效果,满足打印模型缺陷检测的高效、高准确率的要求。
实施例2、
本实施例的主要结构与实施例1相同,相同之处不再赘述,不同之处在于:
第一图像采集装置设有第一轨道,第一图像采集装置能够沿第一轨道运动,第二图像采集装置设有第二轨道,第二图像采集装置能够沿第二轨道运动,第一轨道和第二轨道围绕3D打印模型外围设置。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种基于深度学习的缺陷检测3D打印装置及方法
- 一种基于深度学习图像语义分割的药片表面缺陷检测方法及其自动化处理装置