一种过热汽温系统的抗扰预测控制方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明属于火电厂过热汽温控制技术领域,具体涉及一种过热汽温系统的抗扰预测控制方法。
背景技术
锅炉过热汽温系统是一个随机组负荷变化的对象,具有大迟延、大惯性、时变性和非线性等动态特性,目前普遍采用有PID控制器构成的串级控制系统或两级喷水减温以减少回路的时延。根据普遍的热力计算方法,一般过热汽温平均温度提高15℃,热效率直接提高1%左右,每降低5-10℃,热效率约降低1%。但超温或者低温有时会影响锅炉的效率,严重时会引发安全事故,因此提高主汽温度的设定值并减小其波动是一种提高热效率和节能减排的重要手段。实际电厂的过热汽温系统运行受多种因素影响,比如风量信号、喷燃器摆角、助燃风和配风方式等因素。传统的DMC控制方法计算量大,而且求逆过程中有可能出现的情况是矩阵不可逆,导致出现数值病态的问题。同时,随锅炉负荷的变化过热汽温会产生较大的波动,对应的动态特性差异较大,若用同一套控制参数会降低控制品质,达不到理想的预测效果。
发明内容
为解决现有技术中存在的问题,本发明提出一种过热汽温系统的抗扰预测控制方法,该方法解决了目前电厂中负荷变化时过热汽温控制系统不能及时响应的问题。
本发明的技术方案如下:
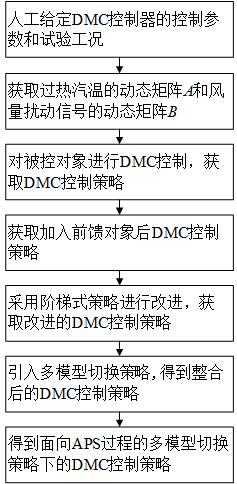
一种过热汽温系统的抗扰预测控制方法,包括以下步骤:
1)人工给定DMC控制器的控制参数和试验工况;
2)将过热汽温作为被控对象,将风量扰动信号作为前馈对象,分别通过阶跃响应实验获取过热汽温的动态矩阵A和风量扰动信号的动态矩阵B;
3)在未加入前馈对象情况下,基于所述过热汽温的动态矩阵A,对被控对象进行DMC控制,获取DMC控制策略;
4)对步骤3)获取的DMC控制策略中加入前馈对象,基于所述风量扰动信号的动态矩阵B,获取加入前馈对象后DMC控制策略;
5)基于步骤4)中加入前馈对象后的DMC控制策略,采用阶梯式策略进行改进,获取改进的DMC控制策略;
6)改变步骤1)中给定的试验工况,重复步骤2)~步骤5),获取所有试验工况下的改进的DMC控制策略,再引入多模型切换策略对所有试验工况下的改进的DMC控制策略进行整合,得到整合后的DMC控制策略;
7)采用APS系统对步骤6)中整合后的DMC控制策略进行封装,得到面向APS过程的多模型切换策略下的DMC控制策略。
优选地,步骤1)中所述DMC控制器的控制参数包括预测时域P、控制时域M、数据长度N、被控对象输出与预测输出误差的权值矩阵Q
优选地,步骤1)中所述DMC控制器的控制参数的参数限制条件为M≤P≤N。
优选地,步骤1)中所述试验工况包括37%负荷,50%负荷,75%负荷和100%负荷四种负荷之一。
优选地,步骤2)中动态矩阵A的获取:
首先对过热汽温进行阶跃响应实验,给过热汽温系统输入减温水阶跃信号,按相同时间间隔采集过热汽温的N个时刻阶跃响应输出a
优选地,步骤2)中动态矩阵B的获取:
将风量扰动信号作为过热汽温系统的前馈对象,对风量扰动信号进行阶跃响应实验,按相同时间间隔采集风量扰动信号的N个时刻阶跃响应输出b
优选地,步骤3)的具体步骤如下:
在未加入前馈对象情况下,取第k时刻的控制增量Δu(k)构成实际控制量u(k),并作用于被控对象:
u(k)=u(k-1)+Δu(k)
式中,u(k-1)为k-1时刻被控对象的控制量;
被控对象的预测输出为:
y(k+j|k)=y
式中,y(k+j|k)为加入k时刻控制增量Δu(k)后控制对象的预测输出;y
被控对象的预测输出的矩阵形式如下:
Y(k)=Y
其中,Y(k)为施加控制增量后控制对象预测输出向量,
Y
ΔU(k)为DMC控制下,未来M个时刻的控制增量向量,
DMC控制策略的指标函数为:
其中,W
ΔU(k)=(A
求解后取出DMC控制增量矩阵中第一行元素Δu(k)与k-1时刻的控制量u(k-1)叠加得到u(k),将u(k)输入到被控对象进行DMC控制。
优选地,步骤4)中,基于步骤2)中获取的动态矩阵B以及通过k时刻的可测扰动量信号v(k)获取的Δv(k),得到加入前馈对象后DMC控制增量矩阵ΔU(k)计算公式:
ΔU(k)=(A
优选地,步骤5)包括如下具体步骤:
令DMC控制增量矩阵ΔU(k)=[Δu(k) Δu(k+1)…Δu(k+M)]
则此时的控制律δ及实际的控制量输出u(k)分别为:
u(k)=u(k-1)+δ
其中,λ是控制量的权重系数,
G=[a
优选地,步骤6)中整合后的DMC控制策略中的最终控制量u为:
其中,u
d
其中,N
本发明积极效果如下:
本发明提出一种过热汽温系统的抗扰预测控制方法,该方法在带扰动前馈的阶梯式DMC控制算法基础上,针对每个工况点设计多模型策略,将非线性模型转换为特定工况下的局部线性模型,能有效提高控制精度。
本发明的抗扰预测控制方法将风量扰动信号作为前馈对象,增强抗干扰性能、提高控制品质。
本发明的抗扰预测控制方法中的阶梯式策略能使预测控制方法的控制量按照一个比例系数变化,控制量呈阶梯状变化,避免传统的DMC矩阵求逆问题。
本发明的抗扰预测控制方法中采用APS系统对整合后的DMC控制策略进行封装,其中APS系统可以规范机组启停机的操作程序、优化系统结构,通过缩短启停机时间,减少燃油或燃煤消耗量,达到提高机组的经济效益的目的。该抗扰预测控制方法考虑到APS过程中过热汽温系统特性的非线性,通过引入多模型切换策略来提高控制系统的鲁棒性。
附图说明
图1为本发明的流程图;
图2为本发明方法中加入前馈对象后DMC控制算法流程图;
图3为本发明方法中整合后的DMC控制系统框图;
图4为应用实施例中改进的DMC控制策略与传统PID控制方法在不同负荷条件下的过热气温控制效果对比图;
图5为应用实施例中APS断点策略下的机组变工况变化示意图;
图6为应用实施例中抗扰预测控制方法与传统串级PID控制下的过热气温随机组工况变化示意图;
图7为应用实施例中抗扰预测控制方法与传统串级PID控制下对应的减温水阀门开度随机组工况变化示意图。
具体实施方式
实施例一:
本实施例的一种过热汽温系统的抗扰预测控制方法,如图1所示,包括以下步骤:
1)人工给定DMC控制器的控制参数和试验工况;DMC控制器的控制参数包括预测时域P、控制时域M、数据长度N、被控对象输出与预测输出误差的权值矩阵Q
2)将过热汽温作为被控对象,将风量扰动信号作为前馈对象,分别通过阶跃响应实验获取过热汽温的动态矩阵A和风量扰动信号的动态矩阵B;
3)在未加入前馈对象情况下,基于所述过热汽温的动态矩阵A,对被控对象进行DMC控制,获取DMC控制策略;
4)对步骤3)获取的DMC控制策略中加入前馈对象,基于所述风量扰动信号的动态矩阵B,获取加入前馈对象后DMC控制策略;
5)基于步骤4)中加入前馈对象后的DMC控制策略,采用阶梯式策略进行改进,获取改进的DMC控制策略;
6)改变步骤1)中给定的试验工况,重复步骤2)~步骤5),获取所有试验工况下的改进的DMC控制策略,再引入多模型切换策略对所有试验工况下的改进的DMC控制策略进行整合,得到整合后的DMC控制策略;
7)采用APS系统对步骤6)中整合后的DMC控制策略进行封装,得到面向APS过程的多模型切换策略下的DMC控制策略。
实施例二:
本例的进一步设计在于:本例的步骤2)将过热汽温作为被控对象,将风量扰动信号作为前馈对象,分别通过阶跃响应实验获取过热汽温的动态矩阵A和风量扰动信号的动态矩阵B,包括如下具体步骤:
首先对过热汽温进行阶跃响应实验,给过热汽温输入阶跃信号,按相同时间间隔采集过热汽温的N个时刻阶跃响应输出a
将风量扰动信号作为前馈对象,对风量扰动信号进行阶跃响应实验,按相同时间间隔采集风量扰动信号的N个时刻阶跃响应输出b
实施例三:
本例的进一步设计在于:本例的步骤3)在未加入前馈对象情况下,基于所述过热汽温的动态矩阵A,对被控对象进行DMC控制,获取DMC控制策略,该步骤具体包括:
在未加入前馈对象情况下,取第k时刻的控制增量Δu(k)构成实际控制量u(k),如图2,作用于被控对象,被控对象实际输出为y(k+1):
u(k)=u(k-1)+Δu(k)
式中,u(k-1)为k-1时刻被控对象的控制量;
同时将实际控制量u(k)送入预测模型,得到被控对象的预测输出:
y(k+j|k)=y
式中,y(k+j|k)为加入k时刻控制增量Δu(k)后控制对象的预测输出;y
被控对象的预测输出的矩阵形式如下:
Y(k)=Y
其中,Y(k)为施加控制增量后控制对象预测输出向量,
Y
ΔU(k)为DMC控制下,未来M个时刻的控制增量向量,
DMC控制策略的指标函数为:
其中,W
ΔU(k)=(A
求解后取出DMC控制增量矩阵中第一行元素Δu(k)与k-1时刻的控制量u(k-1)叠加得到u(k),将u(k)输入到被控对象进行DMC控制。
上式ΔU(k)仅为开环计算结果,需加入反馈校正环节来修正计算误差,如图2所示,y(k+j|k)中取第一步预测值y(k+1|k),与对象实际输出y(k+1)构成误差e(k+1),将预测模型输出y(k+j|k)加上he(k+1)进行反馈校正,h为误差校正系数,校正后y(k+j|k)与设定值w(k)做差后进行下一步滚动优化求解(即通过公式计算ΔU(k)),得到下一步u(k)后重复上述过程。
实施例四:
本例的进一步设计在于:本例的步骤4)中,基于步骤2)中获取的动态矩阵B以及通过k时刻的可测扰动量信号v(k)获取的Δv(k),如图2中将v(k)送入被控对象和扰动模型部分,得到加入前馈对象后DMC控制增量矩阵ΔU(k)计算公式:
ΔU(k)=(A
实施例五:
本例的进一步设计在于:本例的步骤5)包括如下具体步骤:
令DMC控制增量矩阵ΔU(k)=[Δu(k) Δu(k+1)…Δu(k+M)]
则此时的控制律δ及实际的控制量输出u(k)分别为:
u(k)=u(k-1)+δ
其中,λ是控制量的权重系数,
G=[a
实施例六:
本例的进一步设计在于:本例的步骤6)中整合后的DMC控制策略中的最终控制量u为:
其中,u
d
其中,N
如图3所示,整合后的DMC控制器(多模型SDMC)输入为过热汽温设定值加上经过扰动模型的风量扰动信号,减去过热汽温反馈值。经过控制器内部依据机组负荷建立的多个局部模型线性内插和排序,得到控制器输出,作为PID控制器的设定值,该设定值与喷水减温阀反馈做差作为PID控制器输入,对喷水减温阀进行控制,喷水减温阀指令送入过热器对过热汽温进行控制,构成完整的控制流程。
应用实施例:
本应用实施例采用本发明的过热汽温系统的抗扰预测控制方法,对某热电厂600MW超临界机组锅炉的过热气温系统进行抗扰预测控制,数据采集来源为该热电厂DCS系统中所存储的运行历史数据,具体过程如下:
1)人工给定DMC控制器的控制参数和试验工况;其中,DMC控制器的控制参数包括预测时域P、控制时域M、数据长度N、被控对象输出与预测输出误差的权值矩阵Q
2)将过热汽温作为被控对象,将风量扰动信号作为前馈对象,分别通过阶跃响应实验获取过热汽温的动态矩阵A和风量扰动信号的动态矩阵B,包括如下具体步骤:
首先对过热汽温进行阶跃响应实验,给过热汽温输入阶跃信号,按相同时间间隔采集过热汽温的N个时刻阶跃响应输出a
将风量扰动信号作为前馈对象,对风量扰动信号进行阶跃响应实验,按相同时间间隔采集风量扰动信号的N个时刻阶跃响应输出b
3)在未加入前馈对象情况下,基于所述过热汽温的动态矩阵A,对被控对象进行DMC控制,获取DMC控制策略,具体步骤如下:
在未加入前馈对象情况下,取第k时刻的控制增量Δu(k)构成实际控制量u(k),并作用于被控对象:
u(k)=u(k-1)+Δu(k)
式中,u(k-1)为k-1时刻被控对象的控制量;
被控对象的预测输出为:
y(k+j|k)=y
式中,y(k+j|k)为加入k时刻控制增量Δu(k)后控制对象的预测输出;y
被控对象的预测输出的矩阵形式如下:
Y(k)=Y
其中,Y(k)为施加控制增量后控制对象预测输出向量,
Y
ΔU(k)为DMC控制下,未来M个时刻的控制增量向量,
DMC控制策略的指标函数为:
其中,W
求解上述指标函数得到DMC控制增量矩阵ΔU(k)计算公式:
ΔU(k)=(A
求解后取出DMC控制增量矩阵中第一行元素Δu(k)与k-1时刻的控制量u(k-1)叠加得到u(k),将u(k)输入到被控对象进行DMC控制。
4)对步骤3)获取的DMC控制策略中加入前馈对象,基于所述风量扰动信号的动态矩阵B,获取加入前馈对象后DMC控制策略;该步骤中基于步骤2)中获取的动态矩阵B以及通过k时刻的可测扰动量信号v(k)获取的Δv(k),得到加入前馈对象后DMC控制增量矩阵ΔU(k)计算公式:
ΔU(k)=(A
5)基于步骤4)中加入前馈对象后的DMC控制策略,采用阶梯式策略进行改进,获取改进的DMC控制策略,如下具体步骤:
令DMC控制增量矩阵ΔU(k)=[Δu(k) Δu(k+1)…Δu(k+M)]
则此时的控制律δ及实际的控制量输出u(k)分别为:
u(k)=u(k-1)+δ
其中,λ是控制量的权重系数,
G=[a
测试一:本例针对不同负荷条件对该热电厂600MW超临界机组锅炉的过热汽温系统,采用上述步骤1)~步骤5)改进的DMC控制策略(SDMC)进行抗扰预测控制,并与传统PID控制策略进行对比,两种控制策略的控制效果对比结果如图4所示。
图4给出了相应的控制指标,包括上升时间t
表1不同工况控制算法性能指标对比
根据表1和图4,在机组的四种工况下,本发明的改进的DMC预测控制策略相比于传统PID控制策略,在调节时间t
6)改变步骤1)中给定的试验工况,重复步骤2)~步骤5),获取所有试验工况下的改进的DMC控制策略,再引入多模型切换策略对所有试验工况下的改进的DMC控制策略进行整合,得到整合后的DMC控制策略,其中,整合后的DMC控制策略中的最终控制量u为:
其中,u
d
其中,N
7)采用APS系统对步骤6)中整合后的DMC控制策略进行封装,得到面向APS过程的多模型切换策略下的DMC控制策略,面向APS过程中过热汽温多模型控制策略的实现方式为:在升降负荷断点处,APS系统向锅炉主控发送目标负荷的设定指令,锅炉侧以一定的速率增减燃烧率指令,导致过热气温的动态特性随着炉膛热量而改变,虽然过热器出口温度设定值的基本部分是负荷指令点的函数,但在35%-100%范围内过热汽温的设定值是恒定的。那么依次经过37%-100%负荷段,根据试验工况模型及其相应的阶梯式DMC算法,并融合最接近和次接近试验工况的控制量加权方法得到使汽温变化最小的最优控制量。
测试二:为突出本发明的抗扰预测控制方法的特点,本例采用本发明上述面向APS过程的多模型切换策略下的DMC控制策略(MSDMC),在机组负荷指令于37%~100%进行连续升负荷时(如图5所示),并且过热汽温保持570℃不变的条件下,对该热电厂600MW超临界机组锅炉的过热气温系统进行抗扰预测控制,并与传统串级PID控制策略进行对比,结果如图6和图7所示,由于在APS断点下的过热气温设定值不变,因此本例采用最大偏差和标准差来评价传统串级PID与MSDMC控制策略,性能指标见表2。由表2可见,本发明MSDMC控制策略的最大偏差和标准差均小于传统串级PID控制策略,本发明MSDMC控制策略较优。
表2
。
- 一种过热汽温系统的抗扰预测控制方法
- 一种扰动补偿的单回路过热汽温自抗扰控制方法