一种混凝土回弹仪校准装置及混凝土回弹仪校准方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及一种校准检定领域中的混凝土回弹仪校准装置及混凝土回弹仪校准方法。
背景技术
混凝土回弹仪式一种用弹簧驱动弹击锤,弹击锤通过弹击杆撞击混凝土表面,混凝土表面产生顺势弹性变形吸收能量,弹击锤回弹,根据能量损失来表征混凝土的硬度。利用的原理是,混凝土越硬,混凝土产生弹性形变吸收的能量就越少,那么弹击锤撞击过程中损失的能量就越少。
现有的混凝土回弹仪结构如图1所示:回弹仪壳体1,回弹仪壳体1上设置有弹击杆和位于弹击杆上侧的导杆,导杆上导向移动装配有弹击锤,导杆上于弹击锤的上侧还导向移动装配有扳机座,壳体与扳机座之间设置有复位弹簧,壳体与弹击锤之间设置有撞击弹簧,其中复位弹簧为一个压簧,撞击弹簧为一个拉簧,扳机座上设只有用于与弹击锤相连的扳机。
使用时,操作人员手持回弹仪壳体,弹击杆的端部与混凝土接触,操作人员按压回弹仪壳体,扳机与弹击锤钩挂配合,弹击杆朝反方向移动,撞击弹簧被拉伸储能,复位弹簧被压缩,当到达设定位置时,回弹仪壳体触碰扳机上端,扳机旋转,扳机不再与弹击锤钩挂配合,弹击锤在撞击弹簧作用下朝向弹击杆撞击,弹击杆撞击混凝土,复位弹簧主要用于扳机座复位,在弹击锤朝弹击杆运动过程中,复位弹簧并不对弹击锤产生作用力,撞击结束后,依靠复位弹簧,扳机仍能顺利与弹击锤钩挂配合,以方便下次撞击使用。
根据弹击锤撞击过程中的能量损失来判断混凝土的硬度,这个能量损失可以根据弹击锤撞击前后的势能损失或动能损失来计算。由此可见,回弹仪是否准确,主要取决于回弹仪里面的撞击弹簧,根据相应的校准检定要求,回弹仪需要定期校准,回弹仪的校准本质上就是对其内撞击弹簧的校准,现有技术中,对回弹仪的校准方式是将回弹仪完全拆卸,然后将回弹仪里面的撞击弹簧取出,在撞击弹簧上施加标准重量,根据撞击弹簧的拉伸长度,来判断弹击锤弹簧的弹性系数是否能够满足使用精度。这种校准方式存在以下问题:1)、拆卸回弹仪,工作量较大,增加了校准难度;2)、弹击锤弹簧由回弹仪中取出后,其已经脱离其真实工作环境,即使完成对弹簧的校准,弹击锤弹簧装进回弹仪后,其是否准确仍未可知。
发明内容
本发明的目的在于提供一种不需要拆卸混凝土回弹仪就可以实现对混凝土回弹仪进行校准的回弹仪校准装置;本发明的目的还在于提供一种使用该回弹仪校准装置的及混凝土回弹仪校准方法。
为解决上述技术问题,本发明中回弹仪校准装置的技术方案如下:
一种混凝土回弹仪校准装置,包括装置支架、测试弹簧和测力传感器,测力传感器、测试弹簧上设置有用于实现其二者这两个部件与待校准的回弹仪沿直线串联传力配合的传力端,装置支架上设置有边缘部件固定结构和边缘部件导向结构,测力传感器、测试弹簧和回弹仪这三个部件中,位于边缘的两个部件,其中一个部件固定于边缘部件固定结构上,另外一个部件固定于边缘部件导向结构上。
测试弹簧的传力端包括设置其一端的第一传力端和设置其另外一端的第二传力端,第一传力端用于与回弹仪的弹击杆顶压配合,第二传力端用于与测力传感器顶压配合。
测力传感器固定于边缘部件固定结构上,边缘部件导向结构用于安装回弹仪。
第一传力端为与弹击杆结构相同的顶压杆结构。
测试弹簧的传力端包括设置其一端的第一传力端和设置其另外一端的第二传力端,第一传力端用于与回弹仪的弹击杆顶压配合,回弹仪远离测试弹簧的一端与测力传感器的传力端传力配合。
测力传感器与回弹仪之间设置有弹性缓冲结构。
测力传感器固定于边缘部件固定结构上,测试弹簧远离回弹仪的一端安装于边缘部件导向结构上,装置支架上设置有用于减小回弹仪与装置支架之间摩擦力的回弹仪支撑滚动体。
混凝土回弹仪校准装置还包括用于检测校准过程中测试弹簧压缩长度的第一测量装置和/或用于检测校准过程中弹击杆相对回弹仪壳体位移变化的第二测量装置。
测力传感器和测试弹簧水平布置。
本发明中混凝土回弹仪校准方法的技术方案为:
混凝土回弹仪校准方法,该校准方法包括以下步骤:第一步;将测力传感器、测试弹簧和待校准的混凝土回弹仪这三个部件沿直线串联在一起,位于边缘的两个部件,其中一个部件固定于边缘部件固定结构上,另外一个部件固定于边缘部件导向结构上,固定在边缘部件导向结构上的部件称为可移动部件;第二步,向可移动部件施加作用力,可移动部件朝边缘部件固定结构匀速移动,压缩测试弹簧,回弹仪的撞击弹簧拉伸、复位弹簧压缩,直至撞击弹簧储能结束并释放能量,撞击弹簧储能结束时,测力传感器的读数为F1,撞击弹簧能量释放完成时,测力传感器的读数为F2,则F1-F2即为撞击弹簧自储能开始到储能结束的最大弹性力,然后根据撞击弹簧自储能开始到储能结束的拉伸长度,可以对撞击弹簧进行弹性系数校准。
本发明的有益效果为:本发明中,可以不拆卸的完成对回弹仪的撞击弹簧进行校准,在校准时,将测力传感器、测试弹簧和待校准的回弹仪三个部件串联传动在一起,将边缘位置的一个部件固定,向另外一个边缘位置的部件施加作用力,可移动部件朝边缘部件固定结构匀速移动,压缩测试弹簧,回弹仪的弹击杆带着撞击弹簧拉伸,撞击弹簧储能,同时回弹仪的复位弹簧被压缩,此时测力传感器测量得到撞击弹簧、复位弹簧对弹击杆的合力,随着可以移动部件的移动,撞击弹簧储能达到最大值,此时测力传感器的读数F1即为此时撞击弹簧、复位弹簧对弹击杆的最大作用力,随后,撞击弹簧释放能量,撤去作用在可移动部件上的作用力,回弹仪的弹击锤朝向弹击杆撞击,回弹仪的运动动力来自撞击弹簧,当撞击弹簧能量完全释放后,此时弹击杆只受复位弹簧的作用力,测力传感器测量得到此时刻的力值F2,则F1-F2则表示整个撞击弹簧储能过程中,撞击弹簧对弹击杆的最大作用力,然后根据在整个储能过程中,弹击杆相对回弹仪壳体的位移量(即撞击弹簧的拉伸量),可以计算出撞击弹簧的弹性系数,从而对撞击弹簧进行校准。
附图说明
图1是本发明背景技术中回弹仪的结构示意图;
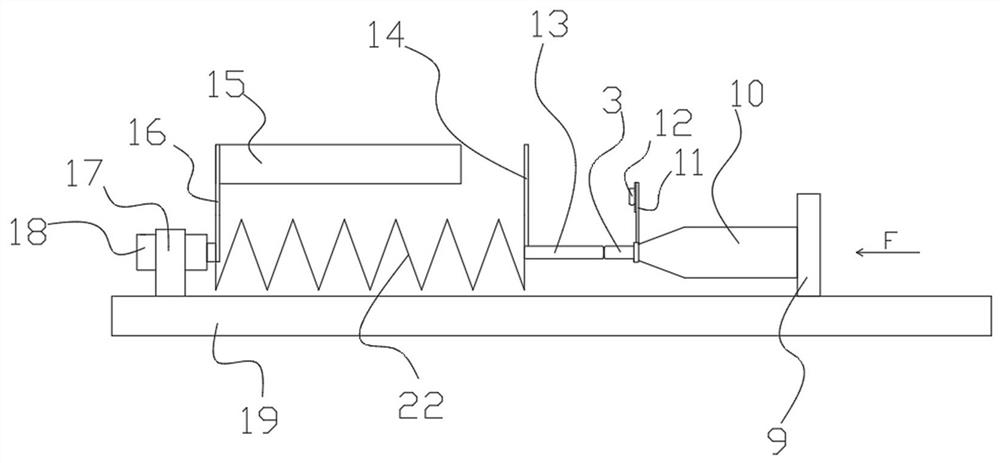
图2是本发明中混凝土回弹仪校准装置的实施例1的结构示意图;
图3是实施例1中时间与测力传感器读数的关系曲线图;
图4是本发明中混凝土回弹仪校准装置的实施例2的结构示意图;
图中:1、回弹仪壳体;2、撞击弹簧;3、弹击杆;4、弹击锤;5、扳机;6、复位弹簧;7、扳机座;8、导杆;9、边缘部件导向结构;10、回弹仪;11、传感器安装座;12、第二测量装置;13、第一传力端;14、第二安装板;15、第一测量装置;16、第一安装板;17、边缘部件固定结构;18、测力传感器;19、装置支架;20、弹性缓冲结构;21、回弹仪支撑滚动体;22、测试弹簧。
具体实施方式
为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。附图中给出了本发明的较佳的实施例。但是,本发明可以以许多不同的形式来实现,并不限于本说明书所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
需要说明的是,除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。
下面结合附图,对本发明的各实施例进行详细说明。
本发明中混凝土回弹仪的实施例如图2~3所示:包括装置支架19、测试弹簧22和测力传感器18,装置支架19为一板状结构。
装置支架19的左侧固定有边缘部件固定结构17,本实施例中边缘部件固定结构包括固定套,测力传感器18水平固定于固定套的内孔中。装置支架的右侧固定有边缘部件导向结构9,边缘部件导向结构包括沿左右方向导向移动装配于装置支架上的安装座,使用时,待校准的回弹仪10水平固定于安装座的左侧。
测试弹簧的右端为第一传力端13,测试弹簧的左端为第二传力端,第二传力端与测力传感器固定连接而实现测试弹簧与测力传感器之间的传力配合。测试弹簧22水平布置,第一传力端13为与弹击杆结构相同的顶压杆结构,使用时顶压杆与回弹仪的弹击杆同轴线布置,顶压杆的右端顶在弹击杆的左端。
混凝土回弹仪校准装置还包括用于检测校准过程中测试弹簧压缩长度的第一测量装置和用于检测校准过程中弹击杆相对回弹仪壳体位移变化的第二测量装置,第一测量装置包括第一位移传感器15,第一位移传感器的左端固定于第一安装板16上,第一安装板16固定于测试弹簧22的左端,测试弹簧22的右端固定有与第一安装板并列布置的第二安装板14,第一位移传感器发射出的测量激光经过第二安装板反射回到第一位移传感器。第二测力装置包括第二位移传感器12,第二位移传感器12为竖向布置的激光位移传感器,第二测力装置通过传感器安装座11固定于回弹仪壳体上,使用时,在弹击杆上涂上测量格栅,激光位移传感器发出朝下的激光,对测量格栅进行激光照射,当弹击杆相对回弹仪壳体产生位移时,测量格栅移动,从而测量到弹击杆相对回弹仪壳体的位移值。
在对回弹仪进行校准时,如图1,将回弹仪固定于边缘部件导向结构的左侧,对边缘部件导向结构施加朝左方向的作用力F,该力的施加可以通过操作人员手动推着边缘部件导向结构来实现,也可以通过机械式的推动机构来实现,比如说通过电动推杆、直线作动缸等,回弹仪整体朝左匀速移动,直至弹击杆与测试弹簧右端的顶压杆触碰,测力传感器开始有读数,对于回弹仪的弹击杆而言,弹击杆受到顶压杆朝右方向的作用力,同时弹击杆还受到回弹仪内部撞击弹簧、复位弹簧朝左方向的作用力,因此测力传感器的读数即为撞击弹簧、复位弹簧对弹击杆的作用力,如图3所示,随着时间的增加,测力传感器的读数越来越大,撞击弹簧拉伸储能,复位弹簧压缩储能,直至撞击弹簧储能结束,记该时刻为t1时刻,测力传感器的读数为F1,回弹仪的扳机被解锁时,撤销作用力F,此时撞击弹簧释放,回弹仪的弹击锤撞击弹击杆,在弹击锤撞击弹击杆的过程中,回弹仪的复位弹簧并不对弹击锤和弹击杆施加作用力,因此弹击锤撞击弹击杆的过程是一个撞击弹簧单独释放弹性势能的一个过程,该过程中,测力传感器的读数会产生一定的波动,当撞击弹簧能量释放完成后,复位弹簧带动扳机座重新顶在弹击锤上(这是现有技术中回弹仪自身的结构所决定的),记该时刻为t2时刻,测力传感器的读数F2,此时对于回弹仪而言,弹击杆仅受到复位弹簧的作用力,在随后,测试弹簧逐渐复位,最终测试传感器的测力读数为零。则F1-F2即为撞击弹簧自整个拉伸储能过程中的最大作用力,根据撞击弹簧拉伸储能过程中,弹击杆相对回弹仪壳体之间的位移,即可计算撞击弹簧的弹性系数,从而判断撞击弹簧是否符合要求。在本实施例中,弹击杆相对回弹仪壳体之间的位移可以由第二测量装置直接测量得到,在本发明的其它实施例中,第二测量装置也可以不设,因为对于回弹仪自身而言,其自己能够测量撞击弹簧储能过程中弹击锤的移动距离,储能过程中,弹击锤的移动距离即为撞击弹簧的拉伸长度。
撞击弹簧释放能量过程中,弹击锤释放的能量被测试弹簧吸收,通过第一测量装置对测试弹簧的变形长度进行测量,可以计算撞击弹簧释放能量过程中,测试弹簧获得的能量,从而从另一层面对弹击锤、撞击弹簧整体进行校准。
在本发明的其它实施例中:处于边缘位置的回弹仪可以固定于边缘部件固定结构上,而处于另外一个边缘位置的测力传感器可以固定于边缘部件导向结构上,使用时,对测力传感器施加作用力,测力传感器通过测试弹簧对回弹仪的弹击杆进行定压;第二位移传感器也可以水平布置,此时第二位移传感器可以通过对第二安装板14照射来获得弹击杆相对回弹仪壳体的位移值。
本发明的实施例2如图4所示:实施例2与实施例1不同的是,测试弹簧、测力传感器和回弹仪这三个部件的串连传动布局不同,在本实施例中,回弹仪位移测试弹簧和测力传感器之间。测试弹簧左侧的传力端用于接受外力,回弹仪右侧的测力端用于与回弹仪的弹击杆顶压配合,回弹仪远离测试弹簧的一端与测力传感器的传力端传力配合,测力传感器与回弹仪之间设置有弹性缓冲结构,弹性缓冲结构可以是弹簧或者橡胶弹性件等,避免撞击弹簧释放能量时,回弹仪对测力传感器直接冲击而造成测力传感器损伤。测力传感器固定于边缘部件固定结构上,测试弹簧的左端固定于边缘部件导向结构上,边缘部件导向结构为沿左右方向导向移动装配于装置支架上的导向板。
由于测力传感器需要测量测试弹簧的力,为了避免回弹仪与装置支架之间存在较大摩擦力而影响该力的测量,装置支架上设置有用于减小回弹仪与装置支架之间摩擦力的回弹仪支撑滚动体。本实施例中的校准过程是:将回弹仪至于回弹仪支撑滚动体上,对测试弹簧施加朝右方向的作用力,测试弹簧对弹击杆进行顶推,从而实现撞击弹簧的储能和释放过程。
混凝土回弹仪校准方法的实施例如图2~4所示:该校准方法包括以下步骤:第一步;将混凝土回弹仪与混凝土回弹仪校准装置的测力传感器和测试弹簧串连,混凝土回弹仪校准装置的具体结构与上述各混凝土回弹仪校准装置的实施例相同,在此不再详述,具体的,将测力传感器、测试弹簧和待校准的混凝土回弹仪这三个部件沿直线串联在一起,位于边缘的两个部件,其中一个部件固定于边缘部件固定结构上,另外一个部件固定于边缘部件导向结构上,固定在边缘部件导向结构上的部件称为可移动部件;第二步,向可移动部件施加作用力,可移动部件朝边缘部件固定结构匀速移动,压缩测试弹簧,回弹仪的撞击弹簧拉伸、复位弹簧压缩,直至撞击弹簧储能结束并释放能量,撞击弹簧储能结束时,测力传感器的读数为F1,撞击弹簧能量释放完成时,测力传感器的读数为F2,则F1-F2即为撞击弹簧自储能开始到储能结束的最大弹性力,然后根据撞击弹簧自储能开始到储能结束的拉伸长度,可以对撞击弹簧进行弹性系数校准。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种混凝土回弹仪校准装置及混凝土回弹仪校准方法
- 一种混凝土回弹仪用校准装置