基于极限工况的智能驾驶车辆纵横向控制方法和系统
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及智能驾驶技术领域,具体地,涉及一种基于极限工况的智能驾驶车辆纵横向控制方法和系统。
背景技术
智能驾驶是当前热门行业,也是未来汽车发展方向,国内外一直都有各种智能车比赛促进智能驾驶技术发展,各种自动驾驶技术都趋于成熟,其中,智能车的循迹跟踪控制作为自动驾驶技术关键技术,一直以来都是研究的热点。在实际场景中,极限工况是汽车事故的高发区,特别是冰面。在冬天,我国大部分城市车辆控制都必须面对冰面带来的控制难题。即使对于人工驾驶,冰面也是事故高发原因之一;对于智能驾驶,冰面带来的问题更是不可忽视。智能驾驶的推广,必须克服在像冰面这样的极限工况中的控制问题。对于冰面这样低摩擦系数的工况,必须采用合适的算法来实现智能车辆的纵横向控制。
模型预测控制(MPC)是基于预测模型,在时间t时刻对受控体的状态取样,对于未来很短一段的时间域[t,t+T],计算是使代价最小化的控制策略。控制策略仅实现其中的第一步,然后再取得到的最优控制策略下的系统状态,再由新的状态计算新的控制策略。在每一个时间步内,模型预测控制都需要进行反复的预测和优化,利用优化问题的解作为控制器输出作用于受控对象。通过每一个时间步内优化问题的求解,就可以得到整体的控制策略。
对于智能驾驶纵横向控制中多变量、纵向和横向控制的耦合、路面约束以及模型非线性等问题,模型预测控制的预测模型基于多变量状态方程,求解优化问题时可以加入约束条件限制实际工况,对于非线性问题可通过线性化解决,因此模型预测控制可以很好适用于智能驾驶的纵横向控制。
专利文献CN112693449A(申请号:CN202110102987.8)公开了一种无人车辆极限工况下横纵向耦合控制方法,该控制方法包括:构建NMPC横纵向耦合控制预测模型、横向NMPC控制模型和纵向PID控制模型;将所述NMPC横纵向耦合控制预测模型及其相应的车辆模型和性能评价指标函数组成第一控制器;将所述横向NMPC控制模型及其相应的车辆模型和性能评价指标函数、结合所述纵向PID控制模型组成第二控制器;在每个控制周期内,根据当前车速和道路曲率判断当前行驶工况,选择所述第一控制器或所述第二控制器对车辆速度及前轮转角进行控制。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种基于极限工况的智能驾驶车辆纵横向控制方法和系统。
根据本发明提供的基于极限工况的智能驾驶车辆纵横向控制方法,包括:
步骤1:对智能驾驶车辆进行分析并建立动力学模型;
步骤2:根据动力学模型选择状态变量和输入输出变量,得到状态方程;
步骤3:选择状态变量函数作为性能指标,得到性能指标函数,并列出约束条件;
步骤4:获取系统状态信息,求解由性能指标函数、状态方程以及约束条件组成的最优化问题,得到当前最优控制量;
步骤5:将当前最优控制量作为控制输入得到系统下一时刻状态信息,再建立新的最优化问题得到下一时刻最优控制量。
优选的,状态方程中,状态变量为ξ(t),输入量为u(t),s(t)为滑移率,μ(t)为摩擦系数,则有:
u(k)=u(k-1)+Δu(k)
其中:ξ(k+1)表示第k+1时刻的状态变量。
优选的,性能指标函数选择的时间段范围与约束条件的时间段范围相同,为系统当前时间点t到未来时间点t+H
优选的,求解最优化问题为:根据动力学模型和约束条件计算未来的时间段t+1到t+H
得到最优控制量序列u
再选择最优控制量u
优选的,得到当前最优控制量u
根据本发明提供的基于极限工况的智能驾驶车辆纵横向控制系统,包括:
模块M1:对智能驾驶车辆进行分析并建立动力学模型;
模块M2:根据动力学模型选择状态变量和输入输出变量,得到状态方程;
模块M3:选择状态变量函数作为性能指标,得到性能指标函数,并列出约束条件;
模块M4:获取系统状态信息,求解由性能指标函数、状态方程以及约束条件组成的最优化问题,得到当前最优控制量;
模块M5:将当前最优控制量作为控制输入得到系统下一时刻状态信息,再建立新的最优化问题得到下一时刻最优控制量。
优选的,状态方程中,状态变量为ξ(t),输入量为u(t),s(t)为滑移率,μ(t)为摩擦系数,则有:
u(k)=u(k-1)+Δu(k)
其中:ξ(k+1)表示第k+1时刻的状态变量。
优选的,性能指标函数选择的时间段范围与约束条件的时间段范围相同,为系统当前时间点t到未来时间点t+H
优选的,求解最优化问题为:根据动力学模型和约束条件计算未来的时间段t+1到t+H
得到最优控制量序列u
再选择最优控制量u
优选的,得到当前最优控制量u
与现有技术相比,本发明具有如下的有益效果:
本发明对于智能驾驶车动力学模型中的非线性问题可转化为线性问题求解,可以很方便的处理智能驾驶车动力学模型中多变量问题;也可以很方便的处理智能驾驶车动力学模型中多约束问题。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
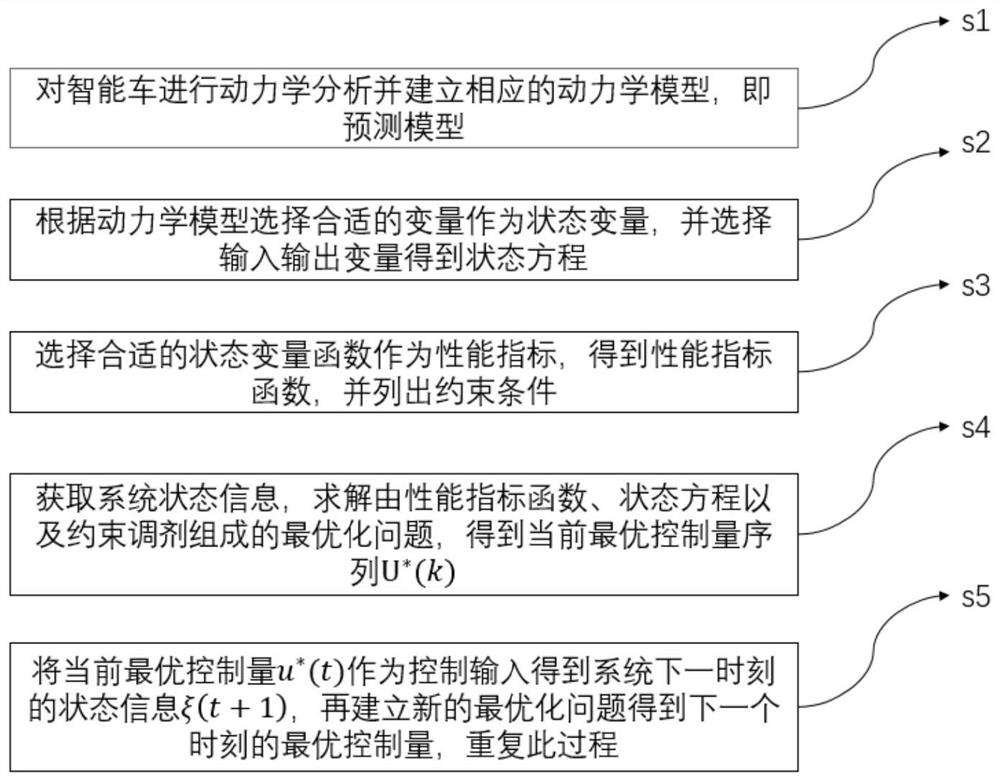
图1为本发明方法流程图;
图2是模型预测算法图;
图3是简化的二自由度智能驾驶车辆模型图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
实施例:
如图1、图2所示,本发明主要基于模型预测控制算法实现对极限工况下智能驾驶车辆的纵横向控制,包括以下步骤:
S1:对智能车分析并建立相应的动力学模型,即预测模型;
S2:根据动力学模型选择合适的变量作为状态变量,并选择输入输出变量得到状态方程;
S3:选择合适的状态变量函数作为性能指标,得到性能指标函数,并列出约束条件;
S4:获取系统状态信息,求解由性能指标函数、状态方程以及约束条件组成最优化问题,得到当前最优控制量序列U
S5:将当前最优控制量u
优选的,可选基于车辆动力学的简化的二自由度自行车模型,建立了用控制的完整的智能车动力学模型。
具体的对智能车分析并建立相应的动力学模型如下,根据图3,由力和力矩守恒得到:
由对其速度分析得到:
对轮胎纵向和侧向速度分析得到:
其中:
轮胎上的力分析得:
F
前轮和后轮上的力F
F
其中轮胎滑移角α:
滑移率s:
轮胎z轴受力:
将(1)-(15)方程表示为:
其中:
优选的,采集系统当前状态信息,根据动力学模型选择合适状态变量,并列出约束条件,将模型离散化,需要将非线性模型线性化,具体的实例如下:
采用合适的线性化和离散化方法可以将(16)改写为如下形式:
δξ
δα
其中:k=t,…,t+H
优选的,选择合适的代价函数作为性能指标,得到性能指标函数,并列出约束条件中,代价函数选择变量平方和,具体如下:
代价函数:
其中:
其中:k=t,…,t+H
约束条件:
u
u
Δu
δ
δΔ
其中:k=t,…,t+H
同时滑移率满足:
δα
对于t+H
Δu
同时有:
∈≥0…………(28)
δξ
优选的,求解由未来输出性能指标函数、未来状态方程以及未来约束条件组成的最优化问题,得到未来最优控制量序列u
Subj.toδξ
δα
u
u
Δu
δ
δΔ
其中:(34)-(38)满足k=t,…,t+H
δα
Δu
∈≥0…………(41)
δξ
通过求解可以得到最优控制序列
将当前最优控制量u
选取当前最优控制增量可以得到当前最优控制量:
再由(17)-(18)可以得到系统下一时刻状态δξ
本发明提出一种基于模型预测控制的极限工况下智能驾驶车辆纵横向控制方法。智能车动力学模型基于二自由度自行车模型,系统状态方程由动力学模型通过线性化、离散化得到,最后优化问题化为二次规划问题。本发明易于处理多约束、多变量的智能车纵横向控制问题,对智能车纵横向控制问题具有重要意义。
根据本发明提供的一种基于模型预测控制的极限工况下智能驾驶车辆纵横向控制系统,包括:
模块M1:对智能车分析并建立相应的动力学模型,即预测模型;
模块M2:根据动力学模型选择合适的变量作为状态变量,并选择输入输出变量得到状态方程;
模块M3:选择合适的状态变量函数作为性能指标,得到性能指标函数,并列出约束条件;
模块M4:获取系统状态信息,求解由性能指标函数、状态方程以及约束条件组成最优化问题,得到当前最优控制量序列U
模块M5:将当前最优控制量u
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 基于极限工况的智能驾驶车辆纵横向控制方法和系统
- 极限工况下基于稳定区域的车辆侧向稳定性控制方法