多区域电力系统的非脆弱容错负荷频率控制方法
文献发布时间:2023-06-19 18:25:54
技术领域
本发明电子系统容错控制技术领域,具体指一种多区域电力系统的非脆弱容错负荷频率控制方法。
背景技术
电力系统是现代社会发展中最为重要的部分之一,无论是人们的日常生活还是企业工厂的生产运营都与之息息相关。随着社会的发展和科学技术的进步,电力系统已经成为我们人类生存的基础。由于外部干扰以及各种相关不确定因素,电力系统会经常偏离正常状态,对社会生产生活造成影响。随着电网规模的扩大和结构复杂性的加深,电力系统正朝着多区域互联的方向发展,需要处理的目标与之前相比越来越多。传统集中控制方法显然已无法很好满足电力系统的需要,难以产生显著效果。此外,一旦控制中心出现严重问题,整个电力系统就将瘫痪,从而导致供电事故等一系列严重问题。在互联电力系统中,某一区域的负荷变化会导致不同区域联络线交换功率的频率不平衡和混乱。为了确保多区域电力系统的稳定性,负荷频率控制已成为有效的控制方法之一。它通过将控制区域内负荷波动等引起的偏差值反馈给控制器来保持系统的稳定性。
多区域电力系统需要通过通信网络频繁传输大量信息,这使得它们面临着网络拥塞或网络攻击的巨大风险。然而,电力系统是一个相互联系、不可分割的整体,众所周知,故障的存在是不可避免的,任何部分的异常都可能导致电力系统无法正常运行甚至停止,造成不同程度的经济损失,进一步影响人类的生活质量和生产效率。因此,将容错控制的思想应用到负荷频率控制中具有重要意义,正成为人们越来越关注的课题。迄今为止,关于电力系统容错控制的论文很少,有一些文献将鲁棒控制和自适应控制方法应用于电力系统,来解决执行器故障的问题。受这些文献的启发,在实践中,失效往往表现出概率分布的特征。大多数情况下,往往出现轻微故障,只有少数情况下会出现严重故障。故障划分的思想是根据概率分布将故障划分为不同的区域进行进一步研究,这是电力系统容错控制的一个新方向。
在实际应用中,参数摄动往往使所设计的控制器难以精确达到目的。控制器的脆弱性将导致系统性能下降甚至失去稳定性。因此,非脆弱控制逐渐成为一个热门话题。除了我们前面提到的干扰因素外,电力系统中的负荷频率控制也有一定的不确定性。目前,在电力系统中,关于这方面的研究很少。控制器的增益摄动通常表示为加性摄动和乘性摄动。现有的非脆弱控制方法通常只考虑特定情况。事实上,控制器的扰动情况往往表现出多样性和不确定性,这就要求非脆弱控制方案具有一定的完整性和系统性。
本发明涉及一种多区域电力系统的容错负荷频率控制器。为了解决多区域电力系统出现故障进而影响实际生产生活,我们引入了负荷频率控制这一电力系统中重要的控制方法,并做出了相应改进。首先,根据小故障和严重故障的分布特征,建立了局部故障的随机分布模型。接着,考虑到控制器增益摄动的具体情况,我们在控制器设计中同时考虑了乘性摄动和加性摄动。然后,考虑到不同的传输延迟,将多区域电力系统建模为一种多时延系统,并提出了一种新的非脆弱H
发明内容
本发明基于目前该方向的研究还较少,为了达到系统在发生一定故障的情况下,仍然能稳定运行且具有H
本发明提供一种多区域电力系统的非脆弱容错负荷频率控制方法,包括以下步骤:
步骤一,指定一个应用区域电力系统,得到该区域部分失效故障下的多区域电力系统的第i个控制区域模型;
该电力系统主要由四部分组成,分别为控制器:
ACE
Δf
步骤二,重建执行器故障模型;
ρ
0<ρ
ρ
ρ
其中
步骤三,容错控制器的设计;
多区域电力系统中第i个区域的控制器可以表示为
ACE
以ACE为输入信号,考虑比例积分型控制器和非脆弱H
其中K
步骤四,在以上步骤的基础上建立闭环多区域电力系统模型:
x(t)=[x
x
u
y(t)=[y
B=diag[B
在多区域电力系统中,由于存在不同的系统参数和发电机模型,假设所有区域具有相同的时间延迟是不符合实际情况的,可能会增加所设计控制器的保守性,所以多个时滞的存在更为合理。将(10)代入(11),闭环多区域电力系统模型可以进一步总结为:
本发明的有益效果:闭环多区域电力系统的稳定性以及H
附图说明
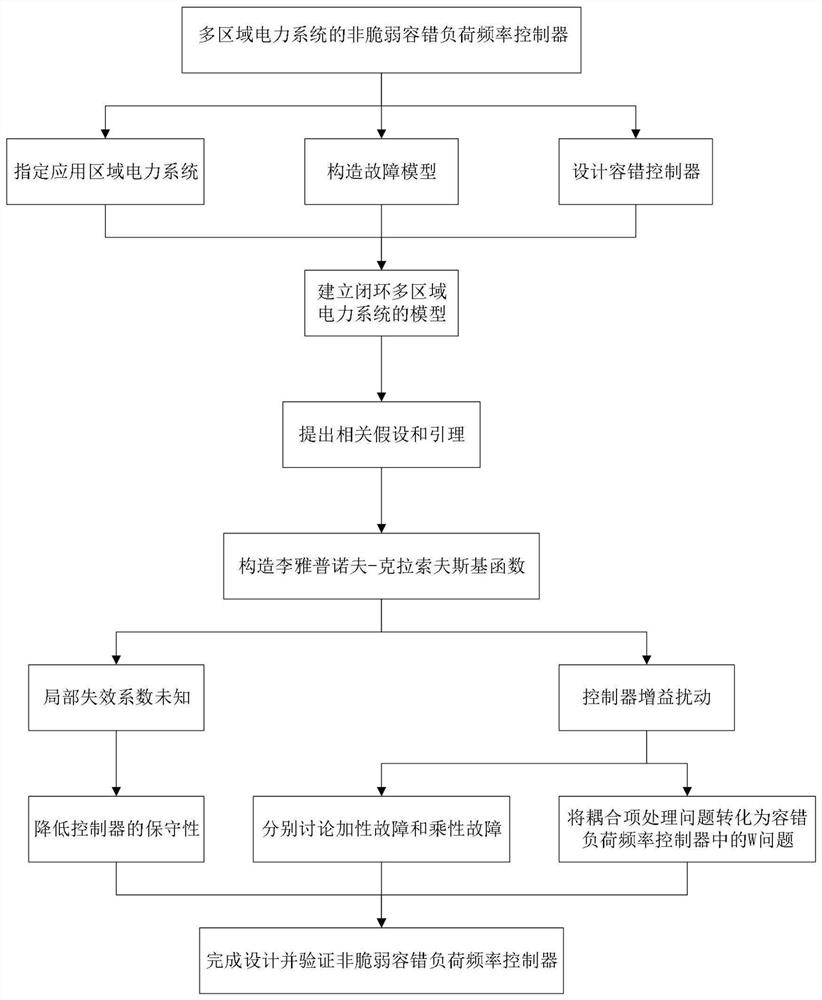
图1、多区域电力系统的非脆弱容错负荷频率控制器的设计流程;
图2、不同区域部分失效故障的概率分布;
图3、区域一具有控制器乘性扰动的系统(12)的状态响应;
图4、区域二具有控制器加性扰动的系统(12)的状态响应。
具体实施方式
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
下面结合附图所示实例,对本发明作进一步详细描述
本实施例提供了一种多区域电力系统的非脆弱容错负荷频率控制方法,如图1所示,包括以下步骤:
步骤(1)得到部分失效故障下的多区域电力系统;
如图1所示,先指定部分失效故障下的多区域电力系统,该电力系统主要由四部分组成,分别为控制器:
其中Δf
步骤(2)重建执行器故障模型;
ρ
0<ρ
ρ
ρ
其中
步骤(3),在步骤(1)和步骤(2)的基础上设计容错控制器;
多区域电力系统中第i个区域的控制器可以表示为
ACE
以ACE为输入信号,考虑比例积分型控制器和非脆弱H
其中K
步骤(4)获得系统最终的模型
x(t)=[x
u
y(t)=[y
B=diag[B
在多区域电力系统中,由于存在不同的系统参数和发电机模型,假设所有区域具有相同的时间延迟是不符合实际情况的,可能会增加所设计控制器的保守性,所以多个时滞的存在更为合理。将(10)代入(11)和闭环多区域电力系统可以进一步总结为:
步骤(5)根据步骤(4)获得的系统模型,给出定理1并构造合适的Lyapunov-Krasovskii函数:
首先,假设ΔK=0,给出以下定理。定理1。对于某些给定的正常数δ′、μ、d
ψ
ψ
ψ
ψ
Lyapunov-Krasovskii函数构造如下:
处理(19)的导数,我们可以得到:
基于E{δ
结合自由权重矩阵技术,给定任何对称矩阵S,以下等式成立:
其中
那么以下不等式包括性能要求就可以实现:
其中
换句话说,如果ψ<0成立,那么
步骤(6)是在步骤(5)的基础上,考虑到以下因素,局部失效系数ρ
定理2对于一些给定的正常数δ
其中
Ω
λ
Y=σ
Y
a
ρ
然后我们可以得出以下等式:
将(27)代入(18),(18)可分为两部分,Γ是指常数部分,可表示为:
其中
ΔΓ表示不确定部分,可表示为:
其中
ΔΓ
γ
d
γ
d
通过结合引理2和引理3,可以得到定理2。
步骤(7)是在步骤(6)的基础上,对控制器增益的乘性扰动和加性扰动分别进行讨论。定理3.1和定理3.2用于求解乘性扰动,而定理4.1和定理4.2用于处理加性扰动。
乘法扰动的形式为ΔK
定理3.1。对于一些给定的正常数δ′
其中
λ′
Ψ
Ψ
α
α′
α′
首先,将控制器增益扰动视为乘法扰动,然后将假设2和引理3与此类问题结合起来。
其中
Δ
然后利用引理2得到矩阵不等式(30),并完成定理3.1的证明。
到目前为止,我们已经解决了控制器增益扰动问题,但在(30)中仍然存在一些耦合项
定理3.2。对于某些给定的正常数δ′
对称矩阵X和正标量γ>0时,以下不等式成立:
其中
此时,特别是对于矩阵B和C都不可逆的情况,传统的变量替换思想不能起到有效的作用,因此我们设置X=S
在多区域电力系统(12)中,该方法可进一步表示为:
通过使用Schur补,得到了相应的结果(32)和(33),控制器增益K可由K=MN
另一方面,研究控制器增益摄动作为乘法摄动,并给出以下定理。
定理4.1。对于一些给定的正常数δ′
其中
β
β′
β′
β′
β′
α′
b
(25)可分为两部分,写为
其中
然后利用引理2,我们可以得到定理4.1。
为了消除耦合项,我们发展了定理4.2,并且可以得到考虑乘性扰动的非脆弱控制器。
定理4.2。对于某些给定的正常数δ′
其中
通过使用与定理3.2的证明类似的方法,可以获得定理4.2。
图1表示的是多区域电力系统容错负荷频率控制器的设计流程。本发明研究的是部分失效故障下多区域电力系统的容错负荷频率控制方法。
图2显示了不同区域部分失效的概率分布。本发明主要针对的是部分失效故障下多区域电力系统的容错负荷频率控制方法,所以要分别地验证非脆弱控制器的功能。
图3表示多区域电力系统(12)在控制器乘性扰动下的状态响应。在故障以及扰动发生的情况下,各分量逐渐趋于0,即电力系统实现均方稳定且具有H
图4表示多区域电力系统(12)在控制器加性扰动下的状态响应。在故障以及扰动发生的情况下,各分量逐渐趋于0,即电力系统实现均方稳定且具有H
通过上述技术方案,本实施例提供的一种多区域电力系统的非脆弱容错负荷频率控制方法,为了解决多区域电力系统出现故障进而影响实际生产生活,我们引入了负荷频率控制这一电力系统中重要的控制方法,并做出了相应改进。首先,根据小故障和严重故障的分布特征,建立了局部故障的随机分布模型。接着,考虑到控制器增益摄动的具体情况,我们在控制器设计中同时考虑了乘性摄动和加性摄动。然后,考虑到不同的传输延迟,将多区域电力系统建模为一种多时延系统,并提出了一种新的非脆弱H
以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式包括部件进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
- 多区域互联电力系统基于故障容错的负荷频率控制的方法
- 多区域互联电力系统基于故障容错的负荷频率控制的方法