一种蛋白分子机器的运动模式模拟方法
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及车辆控制技术领域,尤其涉及一种轮胎-路面附着系数在线估算方法及装置。
背景技术
蛋白分子机器指由分子尺度的物质构成、能够行使某种加工功能的机器,其构件主要是蛋白等生物分子,参与众多重要的生命过程。对蛋白机器结构、功能及其运动模式研究,是理解这种高维度复杂分子机器的基础,对揭示生命现象的本质具有重要意义。最新的严重急性呼吸系统综合症冠状病毒2(SARS-CoV-2)变种Omicron由于其传染性和疫苗逃逸突变在世界范围内引发了恐慌。SARS-CoV-2变体的传染性和抗体抗性取决于其在刺突S蛋白受体结合域(RBD)上的突变。而Omicron在刺突蛋白的RBD中发生了大量突变,这引起了科学界和公众的高度关注。探索Omicron变种S蛋白与人体受体ACE2结合情况也变的尤为重要。
发明内容
针对上述问题,本发明提供了一种蛋白分子机器的运动模式模拟方法,其结合分子动力学模拟和深度神经元网络,实现对蛋白分子机器的运动模式的精确模拟和预测。
本发明提供的技术方案如下:
一种蛋白分子机器的运动模式模拟方法,包括:
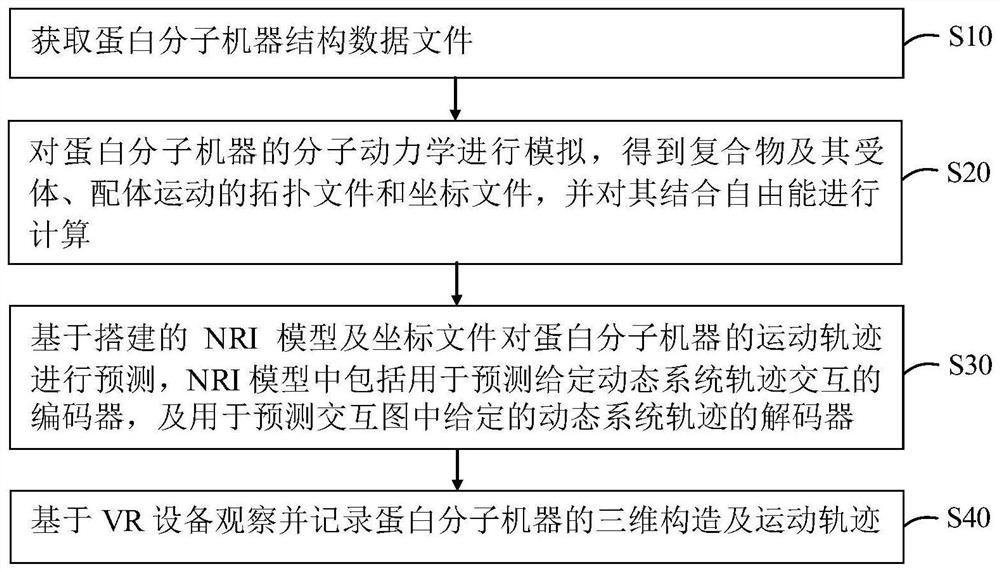
S10获取蛋白分子机器结构数据文件,所述蛋白分子机器包括配体野生型和Omicron Ba.2的RBD区S蛋白与受体ACE2的复合物;
S20对所述蛋白分子机器的分子动力学进行模拟,得到复合物及其受体、配体运动的拓扑文件和坐标文件,并对其结合自由能进行计算;
S30基于搭建的NRI模型及坐标文件对蛋白分子机器的运动轨迹进行预测,所述NRI模型中包括用于预测给定动态系统轨迹交互的编码器,及用于预测交互图中给定的动态系统轨迹的解码器;所述NRI模型中,输入为复合物的运动坐标,输出为复合物的预测运动坐标;
S40基于VR设备观察并记录所述蛋白分子机器的三维构造及运动轨迹。
本发明提供的蛋白分子机器的运动模式模拟方法,采用分子动力学模拟的方法探索配体Omicron Ba.2的RBD区S蛋白与受体ACE2之间的动力学相互作用,并与野生型与ACE2体系进行对比。模拟发现,Omicron表现出与人体细胞更强的结合能力,且很多重要突变都发生在与ACE2接触的RBD中,说明RBD上的突变可能会导致感染性增强,为后续的医学诊断及治疗提供部分依据。
附图说明
下面将以明确易懂的方式,结合附图说明优选实施方式,对上述特性、技术特征、优点及其实现方式予以进一步说明。
图1为本发明中蛋白分子机器的运动模式模拟方法流程示意图。
具体实施方式
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
分子动力学是一种以分子力学为基础的计算机仿真模拟实验方法,主要用于模拟并观测分子在不同环境下的运动变化。分子动力学模拟是分子模拟中最接近实验条件的模拟方法,能够从原子层面给出体系的微观演变过程,直观的展示实验现象发生的机理与规律,促使研究向着更高效、更经济、更有预见性的方向发展,因此,分子动力学模拟在生物,药学,化学,材料科学的研究中发挥着越来越重要的作用。
近年来深度学习取得惊人进展,从模型、算法,到大规模的应用都取得了令人瞩目的成果。深度学习的出现是机器学习的一次重要革命,是人工智能发展巨大推力。传统的神经网络是一种浅层机器学习,深度学习是传统神经网络发展下的新一代神经网络。深度学习是通过建立、模拟人脑的信息处理神经结构来实现对外部输入的数据进行从低级到高级的特征提取,从而能够使机器理解学习数据,获得信息。
VR依托于计算机平台及先进的电子技术,通过创造一个高仿真度的模拟环境空间,通过应用多类传感设备,进一步提高用户使用体验,使体验用户对虚拟空间中的物体以更直观化和可触摸的状态进行实际操作,实现了模拟体验的最佳化。本试验利用VR设备更直观地查看蛋白机器的三维结构,更好地理解蛋白机器的运动模式。
基于此,本发明提供了一种蛋白分子机器的运动模式模拟方法,如图1所示,包括:
S10获取蛋白分子机器结构数据文件,蛋白分子机器包括配体野生型和OmicronBa.2的RBD区S蛋白与受体ACE2的复合物;
S20对蛋白分子机器的分子动力学进行模拟,得到复合物及其受体、配体运动的拓扑文件和坐标文件,并对其结合自由能进行计算;
S30基于搭建的NRI模型及坐标文件对蛋白分子机器的运动轨迹进行预测,NRI模型中包括用于预测给定动态系统轨迹交互的编码器,及用于预测交互图中给定的动态系统轨迹的解码器;NRI模型中,输入为复合物的运动坐标,输出为复合物的预测运动坐标;
S40基于VR设备观察并记录蛋白分子机器的三维构造及运动轨迹。
具体,步骤S10中,需分别准备野生型(变异前)和Omicron Ba.2(Omicron变种)的RBD区S蛋白与ACE2的复合物,这些复合物的结构文件均来自Protein Data Bank(PDB)网站,其中,与Omicron Ba.2形成的复合物取自pdbID 7ZF7,而与野生型的复合物取自pdbID6LZG。此外,还需要使用Pymol软件将复合物的PDB文件拆分为受体和配体以方便后续结合自由能的计算(上述两个复合物中,野生型和Omicron Ba.2的RBD区S蛋白为配体,ACE2为受体)。复合物以及受体、配体在进行分子动力学模拟前还需用UltraEdit预处理PDB文件,只保留Atom字段信息并对其二硫键进行处理。
步骤S20中,使用Amber对蛋白分子机器的分子动力学进行模拟,得到复合物的轨迹文件。具体,使用软件Amber16以及leaprc.ff03ua力场分别模拟野生型和Omicron Ba.2与ACE2的复合物系统:首先,在linux系统下进行分子构建,得到复合物还有受体、配体的拓扑文件和坐标文件(作为后续预测轨迹的参考)。这一过程中,将复合物居中置于立方体盒,并向系统中加入适当的离子以静电中和分子系统,并用tip3pbox水模型溶解,得到溶剂下复合物的拓扑和坐标文件。之后,对溶剂复合物进行能量最小化,并且在50ps的升温后,对复合物进行弱限制条件下50ps的密度平衡,300K温度下500ps的等压平衡。整个模拟过程中,运行时都对氢原子使用SHAKE约束,并使用2fs的时间步长和Langevin动力学控制温度。相对于能量最小化结构的蛋白质骨架计算均方根偏差(RMSD),以确定在平衡期间构象是否已经稳定。这里,平衡期间构象是否稳定根据计算得到的RMSD是否在一定的区间范围内上下浮动进行判断,例如,该值从0开始经历了一段时间后在
基于RMSD性质评估分子动力学模拟是否将溶剂复合物状态平衡后,进一步使用脚本计算S蛋白-ACE2相互作用的能量项,该方法基于具有泊松-玻尔兹曼表面积的分子力学(MM-PBSA)方法。
理想实际情况下,使用在溶剂中的受体和配体结合直接计算结合自由能,但是在这些溶剂化状态的模拟中,大部分能量贡献将来自溶剂-溶剂相互作用,并且总能量的波动将比结合能大一个数量级,因此结合能的计算需要非常长的时间才能收敛。所以更有效的方法是把热力学循环下的各部分分开计算,简化过程是先将受体和配体在气相中结合,然后再把结合物放在溶剂环境中。由于两者的路径始末状态相同,因此从能量守恒角度来说,结合自由能ΔG
ΔG
其中,ΔG
结合能角度来看,结合自由能能量ΔG
ΔG
其中,ΔH表示焓变,可以分解为气相能ΔE
ΔH=ΔE
ΔE
ΔG
其中,ΔE
除了计算结合自由能,基于上述动力学模拟过程得到轨迹文件后,继续通过amber软件对均方根波动(RMSF)、溶剂可达表面积(sasa)及残基最小距离(mindist)进行计算分析,其中,RMSF说明某个残基的和原始位置移动距离的比较,移动的越小说明结合越好,结合自由能就越强,溶剂可达表面积sasa越高;残基最小距离mindist越小结合自由能就越强,距离小于
完成结合自由能的计算之后,在步骤S30中,基于搭建的NRI模型及坐标文件对蛋白分子机器的运动轨迹进行预测,NRI模型中包括用于预测给定动态系统轨迹交互的编码器,及用于预测交互图中给定的动态系统轨迹的解码器;NRI模型中,输入为复合物的运动坐标,输出为复合物的预测运动坐标。具体,NRI模型的输入由N个节点组成,节点i的特征向量(x、y和z维度上的位置和速度)在时间t表示为X
步骤S30得到预测轨迹文件后,将其放在Assets文件夹子文件夹,并将资源分类放入这些文件夹中。这里采用fbx格式的模型文件,该格式可以将动画、材质和细胞等属性随模型同时导出使用。优化三维场景、角色模型,实现交互系统中实时渲染三维网格。具体,运用Xfrog Organic建模工具,制作野生型和Omicron S蛋白与人体ACE2结合的全过程,提升制作三维动画的效率。
VR设备包括:物理空间定位模块,用于通过头戴传感设备对用户进行现实空间中相对位置的定位,获取用户的空间位置数据;VR环境交互模块,用于基于物理空间定位模块获取的空间位置及通过手持传感器捕获的交互动作生成交互信息;消息处理模块,用于对VR环境交互模块生成的交互信息进行处理;VR虚拟环境模拟模块,用于根据消息处理模块生成的交互信息进行场景对象的参数更新,完成新一帧的渲染输出;并将虚拟环境交互信息反馈给用户传感器和物理空间定位模块。
工作中,物理空间定位模块通过头戴传感设备对用户进行现实空间中相对位置的定位,获取用户的空间位置数据。空间位置及交互行为数据获取后交由交互系统进行交互行为解释。现实空间中的位置信息经坐标变化和换算会映射到相应的虚拟环境中不同的位置节点上。手持传感器所捕获的交互动作数据统一转化为不同类型的消息结构体,并发送给各消息处理模块,最后经交互行为反馈模块将对应的交互响应数据和处理事件传递给VR虚拟环境模拟系统进行场景对象的参数更新,完成新一帧的渲染输出,并将虚拟环境交互信息反馈给用户传感器和空间定位装置,以此更清晰地观察感受到完成分子动力学模拟后的蛋白运动轨迹。
本发明中,采用分子动力学模拟的方法探索ACE2与RBD之间的动力学相互作用,并与野生型与ACE2体系进行对比,结果表明,Omicron表现出与人体细胞更强的结合能力,且很多重要突变都发生在与ACE2接触的RBD中,说明RBD上的突变可能会导致感染性增强。同时,通过分子动力学方法研究了受体ACE2与野生型和Omicron Ba.2这两种RBD区S蛋白的结合性质,对氢键、接触残基个数、溶剂可达表面积等方面进行分析,并计算它们RBD区S蛋白与ACE2的结合自由能。
在对运动轨迹进行预测中,搭建了NRI模型,通过训练集和测试集的准确率,选择最优的预测模型。具体,应用Anaconda软件,采用python语言搭建深度学习系统。python是一种面向对象的解释型计算机程序设计语言,其使用具有跨平台的特点。BP网络神经最大的特点就是信号是正向传播的,而误差是反向传播的,可以理解为不停加入输入数据为正向传播信号,而将所得结果进行观察反馈,从而更好地优化模型,这理解为误差的反向传播。它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小。
蛋白质变构是一种由空间长距离蛋白质内通讯促进的生物过程,其中配体结合或远端氨基酸变化远程影响活性位点。分子动力学(MD)模拟为探索变构效应提供了强大的计算方法。然而,目前的MD模拟无法达到整个变构过程的时间尺度。深度学习的出现使得评估空间上的短距离和长距离通信以理解变构成为可能。为此,应用了基于图神经网络的神经关系推理模型,该模型采用编码器-解码器架构,同时推断潜在相互作用,以探测蛋白质变构过程作为相互作用残基的动态网络。从MD轨迹,该模型成功地学习了长程相互作用和路径,此外,该模型可以在MD模拟轨迹中更早地发现与变构相关的相互作用,并比其他方法更准确地预测突变时的相对自由能变化。
分子动力学模拟可以直接探测生物分子运动,但由于模拟的有限时间尺度以及3D轨迹数据的高维性和复杂性,可能无法捕获有意义的功能信息。此外,许多具有挑战性的MD分析问题缺乏合适的方法来探测远程通信。用于模拟蛋白质变构通讯的计算技术依赖于图论度量来识别两个远端活性位点之间的长程耦合。通常,蛋白质可以映射到一个图,其中每个节点表示一个残基,每个加权边表示两个节点之间的相互作用。蛋白质中变构位点和活性位点之间的最短路径对于在变构通信中传播信号可能是重要的。早期的图形模型使用静态晶体结构来计算一个残基和其他残基之间的最短路径,这可能无法解释动态蛋白质中的所有潜在接触以及相关的变构行为。后来一种众所周知的变构方法,扰动响应扫描(PRS),使用基于Hessian的弹性网络模型(ENM)来获得位置的相关动力学。该模型研究单个残基上的扰动如何触发到弹性网络中其他节点的扰动(信号)级联,从而实现变构通信。为了更准确地模拟配体结合或突变时的反应,用包含系统动态特性的协方差矩阵代替了Hessian模型的倒数。
NRI模型适用于学习MD模拟中生物大分子的模拟运动轨迹,其中生物分子由化学键连接的原子形成,其运动规则由牛顿力学描述。该模型使用GNN通过最小化重构轨迹和模拟轨迹之间的重构误差来学习网络动态的嵌入;然后,NRI模型推断由潜在变量表示的残差之间的边。所学嵌入本质上抽象了构象转换中关键残基的基本作用,这有助于破译蛋白质变构的机制。
Unity3D是由Unity Technologies公司开发的专业跨平台游戏开发及虚拟现实引擎,同时支持C#、Java script等多种脚本语言。本发明使用广受业界好评的VR设备HTCVive,结合Unity引擎作为开发平台,研发应用于生物防治VR仿真平台。最终使用VR观察细胞结构以及其运动轨迹。
应当说明的是,上述实施例均可根据需要自由组合。以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通相关人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种机器人运动地毯偏移的识别方法、芯片及清洁机器人
- 一种多运动模式微机器人及其运动控制方法
- 一种基于人造引力场运动模拟的机器人运动规划方法