一种基于能量差异的多机器人分布式最优协同控制算法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及一种控制算法,具体涉及一种基于能量差异的多机器人分布式最优协同控制 算法,应用于自主无人系统技术领域。
背景技术
近些年,随着传感器测量以及无线通信技术的快速发展使得机器人技术获得了飞跃式地 发展。其中,多机器人系统展现出的高效率、低成本以及稳定性使得其相较于单机器人系统 获得更为广泛地应用,例如多机器人编队,大规模无人机飞行控制等。多机器人分布式协同 控制的关键在于利用机器人之间的局部交互,克服环境障碍,完成复杂环境下的协同任务。 比如在森林大火救援中,多机器人系统在协同救援过程中,不仅需要考虑外部环境对通信连 通性的影响,还应对整个系统的续航能力有特殊要求。由于多机器人系统大都采用Lipo锂电, 续航时间有限,因此,研究如何以最小能量实现多机器人的分布式协同控制,从而尽可能地 延长多机器人系统的续航时间具有着重要的实际意义。但是现有技术存在以下问题:
现有技术缺点①:多机器人系统的全局最优控制,要求控制器是集中式的,然而这种集 中式的控制策略需要很高的通信成本,而且随着多机器人系统规模增大,传感器传输距离限 制,导致集中式的协同控制无法实现多机器人系统协同控制。
现有技术缺点②:已有多机器人系统分布式次优化协同控制算法,无法定量分析其与最 优控制策略的能量差异。
主要的现有技术问题为现有技术缺点①,已有的多机器人最优协同控制研究主要集中在 一阶以及二阶多机器人系统,对于更为复杂的高阶多机器人系统研究较少,主要是对于所机 器人高阶自主无人系统,设计通信拓扑与系统参数高度耦合,很难过通过传统的变分法获得 最优协同控制解析解。另外,针对全局最优控制需要获取全局信息这一事实,已有算法设计 了分布式次优协同控制算法,但是并未能定量表述定量描述次优控制器能量范围,因此无法 从能量角度,为实际多机器人的分布式控制器的设计提供依据。
现有技术缺点①原因:高阶最优协同优化问题解析解难以获得,因为设计系统参数与通 信拓扑高度耦合,无法给出精确化的最优通信拓扑结构。
现有技术缺点②原因:由于分布式次优控制策略涉及拉普拉斯矩阵以及时变控制增益, 因为难以获得其能量消耗,从而无法评估分布式次优控制器与最优控制器之间的能量差异, 因此,迫切的需要一种新的方案解决上述技术问题。
发明内容
其中Y(t
为了实现上述目的,本发明的技术方案如下,一种基于能量差异的多机器人分布式最优协 同控制算法,其特征在于,所述方法包括以下步骤:
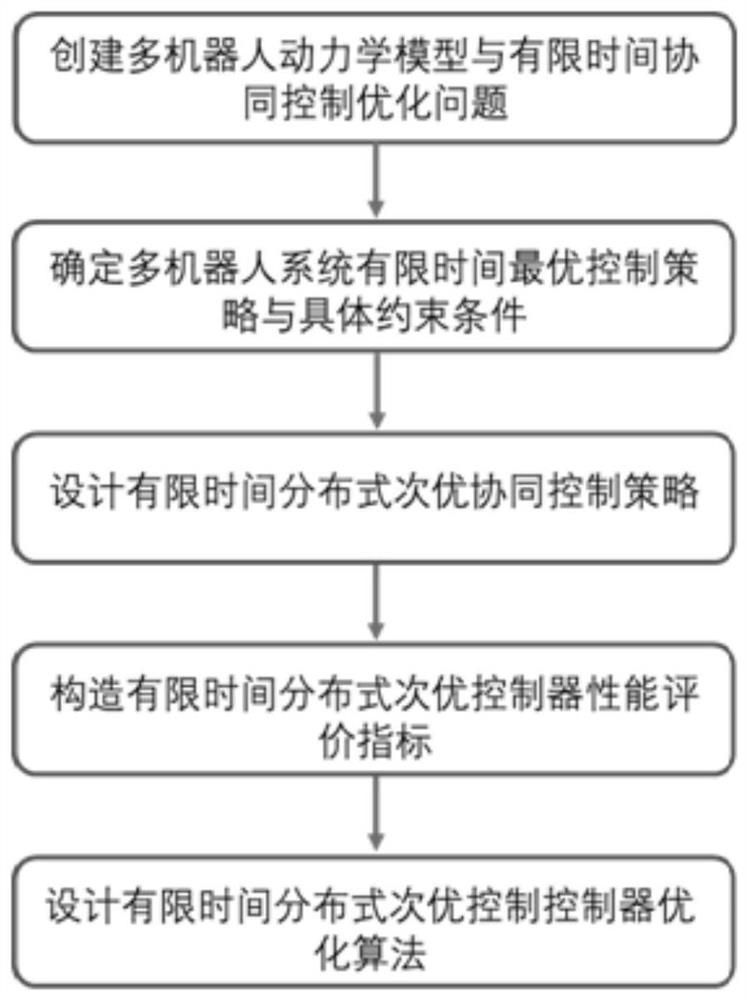
步骤A:创建多机器人动力学模型,并对多机器人系统构造终端固定的有限时间输出调节优化 问题;
步骤B:求解步骤A中的优化问题,获得多机器人系统有限时间最优协同控制策略;
步骤C:设计有限时间分布式次优协同控制策略,利用步骤B中的时变控制增益设计分布式次 优控制器,并在分布式通信拓扑下验证该次优控制器在任意指定时间内收敛;
步骤D:构造分布式次优控制器性能评价指标;
步骤E:利用步骤D中性能评价指标,设计分布式次优控制器优化算法,获得能量消耗与通信 成本更低的分布式控制策略。
作为本发明的进一步改进,其中步骤A中所述的创建多机器人动力学模型与有限时间协同 控制优化问题,具体步骤如下:
步骤A1:多机器人系统包含S(S≥3)个同构移动机器人,每个机器人的动力学方程描述如下:
其中A是系统矩阵,B是控制矩阵,C为输出矩阵且满足行满秩,x
作为本发明的进一步改进,步骤B:针对(1)中多机器人系统构造有限时间收敛且终端固 定的最小能量协同控制优化问题
其中Y(t
步骤B1:构造Hamiltonian函数
其中
步骤B2:协态方程
进而可以解得
步骤B3:平稳条件
可得最优解
步骤B4:边界条件
由
步骤B5:求解状态方程X(t)
将式(6)代入到(1)并求解可得
步骤B6:求解拉格朗日乘子λ(t)
取t=t
其中
将(8)式代入到(5)式可得
步骤B7:求解最优控制器闭环形式
将(9)代入到(6)可得最优控制器
利用动态规划思想在最优轨迹X
其中
步骤B8:最优控制器的最小能量为
步骤B9:最优通信拓扑具体约束
将
其中L=C
步骤B10:由于L以及C的零空间是同步空间span{1
根据代数图论相关知识可得最优控制器所需最优通信拓扑L是完全图拓扑,由上述分析总结 得:最优通信拓扑虽然能获得最小能量。但是通信拓扑要求是完全拓扑,即每个机器人都要 知道其它机器人的信息,需要较高的通信成本。上述步骤构造的优化问题,每个子步骤都是 求解过程,实现有限时间最优同步问题,
作为本发明的进一步改进,步骤C:设计有限时间分布式次优协同控制策略,具体步骤 如下:
步骤C1:有限时间分布式次优协同控制器
其中L
步骤C2:多机器人系统(1)在控制器(14)下的收敛性分析,
构造李雅普诺夫函数
作为本发明的进一步改进,步骤D:构造分布式次优协同控制策略评价指标 步骤D1:估计分布式次优控制器能量消耗
对控制器(14)构造如下代价函数
其中
步骤D2:利用逆最优思想证明控制器(14)能够使得(15)式中的代价函数在t
步骤D3:针对步骤A41和A42构造的优化问题,构造Hamiltonian函数,利用最优控制理论 相关结论可得以(14)为最优控制器的最小代价函数为
其中P(t)与(13)式中定义相同。由此获得分布式次优控制器(14)的能量估计。
步骤D4:将(16)中分布式次优控制器能量消耗估计值与最优控制器(13)的能量消耗进行对比, 可得分布式次优控制器与最优控制器之间的能量差异γ,该差异值映了,相较于完全图下的 最小能量控制,在较为宽松的无向图连通图下,多机器人系统需要多付出多少能量成本。
其中
通过对次优控制器的能量估计,获得了与最优控制器之间的能量差异,该差异反映了较宽松 通信拓扑带来的能量损失。
作为本发明的进一步改进,步骤E:有限时间分布式次优控制策略优化算法 步骤E1:优化问题描述, 从(17)式中的能量差异能够看出,分布式次优控制器虽然能减少通信链路,但是无法获得实 现最小能量,而最小能量由于需要全局信息,必然会带来较高的通信成本,因此这是一个两 难的问题。为实现实际多机器人系统中能量成本与通信成本之间的平衡,获得期望能量范围 内精确化的通信拓扑约束,本专利构造通信拓扑优化算法,找到期望能量差异范围内的最优 通信拓扑;
步骤E2:定义
步骤E3:利用步骤D4所获得的能量差异,对系统(1)构造如下优化问题
s.t.Eg(c',L')≤Eg(cL)
c'≥0.
求解上述优化问题,可获得优化后的L',进而获得期望能量差异下精确化的通信拓扑约 束条件。
相对于现有技术,本发明具有如下优点,该技术方案首先针对一般线性系统多机器人系 统构造有限时间终端固定的最小能量优化问题,利用变分法获得终端约束下的多机器人系统 在任意指定时间按内的最优协同控制器,实现了精准高效的控制目标。随后,对上述有限时 间最优协同控制器进行深度刻画,发现,最优控制器需要每个机器人都知道其它机器人的信 息,因此需要消耗大量的通信成本,且不适合大规模分布式的多机器人协同任务。因此,本 项目进一步设计了有限时间分布式次优控制器,利用逆最优思想,获得分布式控制器能量消 耗成本,并构造分布式次优控制器性能评价指标,以期刻画不同通信拓扑对能量消耗的影响, 为复杂多机器人系统分布式控制器设计在能量成本以及通信成本的均衡上提供理论依据。最 后,利用能量差异,构造优化问题,期望获得能量差异下的精确化通信拓扑约束条件,进而 设计出能量成本与通信成本更低的分布式控制器,为设计多机器人系统高效节能的控制目标 提供技术支撑。
附图说明
图1为本发明整体流程示意图;
图2为本发明最优控制器下的最优通信拓扑示意图;
图3分布式协同控制策略下的连通方式;
图4多机器人的协同轨迹示意图;
图5通信拓扑优化。
具体实施方式
为了加深对本发明的理解,下面结合附图对本实施例做详细的说明。
实施例1:参见图1-图5,一种基于能量差异的多机器人分布式最优协同控制算法,所述方法 包括以下步骤:
步骤A:创建多机器人动力学模型,并对多机器人系统构造终端固定的有限时间输出调节优化 问题;
步骤B:求解步骤A中的优化问题,获得多机器人系统有限时间最优协同控制策略;
步骤C:设计有限时间分布式次优协同控制策略,利用步骤B中的时变控制增益设计分布式次 优控制器,并在分布式通信拓扑下验证该次优控制器在任意指定时间内收敛;
步骤D:构造分布式次优控制器性能评价指标;
步骤E:利用步骤D中性能评价指标,设计分布式次优控制器优化算法,获得能量消耗与通信 成本更低的分布式控制策略。
其中步骤A中所述的创建多机器人动力学模型与有限时间协同控制优化问题,具体步骤如 下:
步骤A1:多机器人系统包含S(S≥3)个同构移动机器人,每个机器人的动力学方程描述如下:
其中A是系统矩阵,B是控制矩阵,C为输出矩阵且满足行满秩,x
其中Y(t
步骤B1:构造Hamiltonian函数
其中
步骤B2:协态方程
进而可以解得
步骤B3:平稳条件
可得最优解
步骤B4:边界条件
由
步骤B5:求解状态方程X(t)
将式(6)代入到(1)并求解可得
步骤B6:求解拉格朗日乘子λ(t)
取t=t
其中
将(8)式代入到(5)式可得
步骤B7:求解最优控制器闭环形式
将(9)代入到(6)可得最优控制器
利用动态规划思想在最优轨迹X
其中
步骤B8:最优控制器的最小能量为
步骤B9:最优通信拓扑具体约束
将
其中L=C
步骤B10:由于L以及C的零空间是同步空间span{1
根据代数图论相关知识可得最优控制器所需最优通信拓扑L是完全图拓扑,由上述分析总结 得:最优通信拓扑虽然能获得最小能量。但是通信拓扑要求是完全拓扑,即每个机器人都要 知道其它机器人的信息,需要较高的通信成本。
其中步骤C:设计有限时间分布式次优协同控制策略,具体步骤如下:
步骤C1:有限时间分布式次优协同控制器
其中L
步骤C2:多机器人系统(1)在控制器(14)下的收敛性分析,
构造李雅普诺夫函数
的判定条件,获得多机器人系统在控制器(14)下的收敛条件。
其中步骤D:构造分布式次优协同控制策略评价指标
步骤D1:估计分布式次优控制器能量消耗
对控制器(14)构造如下代价函数
其中
步骤D2:利用逆最优思想证明控制器(14)能够使得(15)式中的代价函数在t
步骤D3:针对步骤A41和A42构造的优化问题,构造Hamiltonian函数,利用最优控制理论 相关结论可得以(14)为最优控制器的最小代价函数为
其中P(t)与(13)式中定义相同。由此获得分布式次优控制器(14)的能量估计。
步骤D4:将(16)中分布式次优控制器能量消耗估计值与最优控制器(13)的能量消耗进行对比, 可得分布式次优控制器与最优控制器之间的能量差异γ,该差异值映了,相较于完全图下的 最小能量控制,在较为宽松的无向图连通图下,多机器人系统需要多付出多少能量成本。
其中
其中,步骤E:有限时间分布式次优控制策略优化算法
步骤E1:优化问题描述
从(17)式中的能量差异能够看出,分布式次优控制器虽然能减少通信链路,但是无法获得实 现最小能量,而最小能量由于需要全局信息,必然会带来较高的通信成本,因此这是一个两 难的问题。为实现实际多机器人系统中能量成本与通信成本之间的平衡,获得期望能量范围 内精确化的通信拓扑约束,本专利构造通信拓扑优化算法,找到期望能量差异范围内的最优 通信拓扑。步骤E2:定义
步骤E3:利用步骤D4所获得的能量差异,对系统(1)构造优化问题
s.t.Eg(c',L')≤Eg(cL)
c'≥0.
求解上述优化问题,可获得优化后的L',进而获得期望能量差异下精确化的通信拓扑约 束条件。
具体实施例:参照图1—图5,考虑六个移动机器人,每个移动机器人的动力学系统如(1) 式所示,具体参数取A=[0 1;-1 0],B=[0;1],终端时刻t
需要说明的是上述实施例,并非用来限定本发明的保护范围,在上述技术方案的基础上 所作出的等同变换或替代均落入本发明权利要求所保护的范围。
- 基于分布式最优能量MPC的集群协同部署方法
- 基于分布式最优能量MPC的集群协同部署方法