水轮机故障监测方法、装置、设备及介质
文献发布时间:2023-06-19 18:27:32
技术领域
本公开涉及水电设备技术领域,具体地,涉及一种水轮机故障监测方法、 装置、设备及介质。
背景技术
水轮机是把水流的能量转换为旋转机械能的动力机械,在水电站中,上 游水库中的水经引水管引向水轮机,推动水轮机转轮旋转,带动发电机发电。 由于机械形变、轴瓦磨损等原因,造成水轮机组故障,如不及时处理,会造 成严重的破坏性后果,因此在机组运行过程中需要进行机组稳定参数的监测, 以反映机组的实际状态。
为了监测水电机组的运行状态,通常采用直接放置在水轮机上的传感器 搜集震动信号加以分析。通过数据处理,获得大轴转动偏离轴心的振幅,作 为机组保护在旋转状态下的评判标准。
相关技术中,采用深度神经网络、决策树、模糊神经网络等机器学习的 方法对水轮机运行状态进行监测,而训练机器学习的模型需要花费大量的时 间,且训练得到的模型的通用性较低,更换不同型号的水轮机后往往需要重 新获取数据训练模型。
发明内容
本公开的目的是提供一种水轮机故障监测方法、装置、设备及介质,以 解决现有技术中水轮机状态监测方法的通用性较低的问题。
为了实现上述目的,在本公开的第一方面提供了一种水轮机故障监测方 法,所述方法包括:
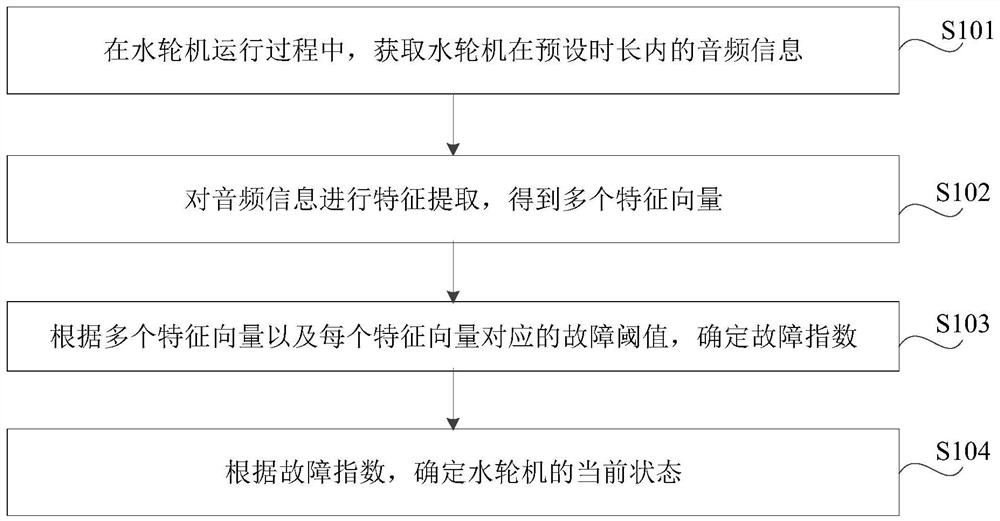
在水轮机运行过程中,获取水轮机在预设时长内的音频信息;
对所述音频信息进行特征提取,得到多个特征向量;
根据所述多个特征向量以及每个特征向量对应的故障阈值,确定故障指 数;
根据所述故障指数,确定所述水轮机的当前状态。
可选地,对所述音频信息进行特征提取,得到多个特征向量的步骤,包 括:
将所述音频信息分别进行时域变换和频域变换,获得多个特征向量。
可选地,所述多个特征向量包括多个时域特征向量以及多个频域特征向 量,将所述音频信息分别进行时域变换和频域变换,获得多个特征向量的步 骤,包括:
根据多个时域特征公式分别对所述音频信息进行运算,得到多个时域特 征向量;
根据多个频域特征公式分别对所述音频信息进行运算,得到多个频域特 征向量;
其中,每个时域特征公式对应一个时域特征向量,每个频域特征公式对 应一个频域特征向量。
可选地,根据所述多个特征向量以及每个特征向量对应的故障阈值,确 定故障指数的步骤,包括:
在所述多个特征向量中的任意一个特征向量超出对应的故障阈值的情 况下,确定该特征向量的故障值为1;
在所述多个特征向量中的任意一个特征向量未超出对应的故障阈值的 情况下,确定该特征向量的故障值为0;
根据所述多个特征向量对应的故障值,确定所述故障指数。
可选地,根据所述多个特征向量对应的故障值,确定所述故障指数的步 骤,包括:
将所述多个特征向量的对应的故障值之和作为所述故障指数。
可选地,根据所述故障指数,确定所述水轮机的当前状态的步骤,包括:
在所述故障指数小于第一阈值的情况下,确定所述水轮机的当前状态为 正常运行状态;
在所述故障指数处于所述第一阈值以及第二阈值的情况下,确定所述水 轮机的当前状态为弱故障状态;
在所述故障指数大于所述第二阈值的情况下,确定所述水轮机的当前状 态为强故障状态。
可选地,所述方法还包括:
每所述预设时长内,获取所述水轮机的多个样本音频信息,所述样本音 频信息是所述水轮机在正常状态下的音频信息;
对所述多个样本音频信息进行特征提取,得到多组样本特征向量,其中, 每个样本音频信息对应一组样本特征向量;
对每组所述样本特征向量进行计算,得到每组样本特征向量对应的初始 故障阈值;
将多个所述初始故障阈值的平均值作为所述故障阈值。
为了实现上述目的,在本公开的第二方面还提供了一种水轮机故障监测 装置,所述装置包括:
获取模块,用于在水轮机运行过程中,获取水轮机在预设时长内的音频 信息;
获得模块,用于对所述音频信息进行特征提取,得到多个特征向量;
第一确定模块,用于根据所述多个特征向量以及每个特征向量对应的故 障阈值,确定故障指数;
第二确定模块,用于根据所述故障指数,确定所述水轮机的当前状态。
为了实现上述目的,在本公开的第三方面还提供了一种电子设备,包括:
存储器,其上存储有计算机程序;
处理器,用于执行所述存储器中的所述计算机程序,以实现上述第一方 面所述方法的步骤。
为了实现上述目的,在本公开的第四方面还提供了一种计算机可读存储 介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一方面所 述方法的步骤。
本公开通过水轮机的音频信息进行特征提取,获得多个特征向量,并根 据多个特征向量以及每个特征向量对应的故障阈值确定故障指数,从而可以 根据故障指数确定水轮机的当前状态,相比于采用机器学习的方法对水轮机 状态进行监测时需要大量数据和时间训练模型,本公开不采用机器学习,逻 辑简明,在确定故障阈值时不会采用大量的数据进行运算,可以有效节省时 间。同时,采用模型输出的结果的可解释性较差,在模型输出错误结果时, 不能确定模型出现错误结果的原因。本公开对音频信息进行特征提取后获得的特征向量以及对应的故障阈值,得出故障指数,可以确定水轮机的当前状 态,若在判断水轮机运行状态时发生错误,一般情况下,可以判定是采集音 频信息的传感器发生故障,因此,本公开的方案具有较高的可解释性。
另外,在水轮机所处环境不同的情况下,模型需要重新训练,而重新训 练的过程会再次花费大量时间和数据,而在水轮机所处环境对本公开方案的 影响较小,本公开适用于不同的环境中,增强了方案的鲁棒性。
本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与 下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在 附图中:
图1是根据一示例性实施例示出的一种水轮机故障监测方法的流程图。
图2是根据一示例性实施例示出的一种水轮机故障监测装置。
图3是根据一示例性实施例示出的一种电子设备的框图。
具体实施方式
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是, 此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
现有技术中,监测水轮机的运行状态一般是基于机器学习用于监测水轮 机的运行状态,通对采集得到的关于水轮机运行状态的大量数据进行预处理 后,使用深度卷积神经网络、长短期记忆神经网络、反馈神经网络中的任一 种神经网络对预处理后的数据进行训练,得到训练后的网络模型,然后对水 轮机运行状态进行预测,从而对水轮机的运行状态进行监测。
基于上述方法,一方面,训练网络模型需要花费大量的时间;另一方面, 这类机器学习方法的鲁棒性较差,且训练得到的网络模型的通用性较低,在 水轮机型号改变后训练网络模型的参数会发生改变。
在此种情况下,本公开提出了一种解决上述问题的方法,其具体构思为: 通过对水轮机运行时的一段时长内的音频信息进行特征提取,获得多个特征 向量,并基于特征向量以及每个特征向量对应的故障阈值得到的故障指数, 确定水轮机的当前状态。
下面结合附图对本公开的方案进行具体描述。
请参见图1,图1是根据一示例性实施例示出的一种水轮机故障监测方 法的流程图,如图1所示,该方法包括:
S101、在水轮机运行过程中,获取水轮机在预设时长内的音频信息。
具体地,预设时长是指获取水轮机音频信息的时长,在一般情况下,预 设时长为30秒或60秒,其中,采集水轮机信号的频率可以是96KHz,即每 秒采集96000次水轮机的信号,在预设时长内采集的所有信号组合为一个音 频信息。
S102、对音频信息进行特征提取,得到多个特征向量。
具体地,对音频信息进行特征提取的方法,一般可以采用时域变换、频 域变换、小波变换或其他非线性变换,提取后可以得到对应的特征向量,本 公开可以采用时域变换和频域变换对音频信息进行特征提取得到多个特征 向量。
S103、根据多个特征向量以及每个特征向量对应的故障阈值,确定故障 指数。
具体地,每个特征向量对应一个故障阈值,故障阈值是预设的值,一般 情况下,故障阈值还可以根据水轮机在正常运行状态下的多组音频信息进行 特征提取和运算得到。其中,可以根据多组运算结果的平均值确定故障阈值; 或者将明显与其余多组运算结果不同的运算结果剔除后,计算剩余运算结果 的平均值作为故障阈值;或者将多组运算结果的数值范围作为故障阈值。另 外,在确定故障阈值之后,若水轮机在更换后的型号与更换前的型号相同, 故障阈值可以不重新确定;而在更换了不同型号的水轮机的情况下,可以对更换后的水轮机重新测量音频数据进行特征提取和运算后得到新的故障阈 值。
故障指数可以用于表征水轮机当前是否处于故障状态下,以及水轮机当 前发生故障的程度。
S104、根据故障指数,确定水轮机的当前状态。
具体地,根据故障指数的大小可以确定水轮机的当前是否发生故障,以 及发生故障的情况下的故障程度。一般情况下,故障指数为0则确定水轮机 未发生故障。
本公开通过水轮机的音频信息进行特征提取,获得多个特征向量,并根 据多个特征向量以及每个特征向量对应的故障阈值确定故障指数,从而可以 根据故障指数确定水轮机的当前状态,相比于采用机器学习的方法对水轮机 状态进行监测时需要大量数据和时间训练模型,本公开不采用机器学习,逻 辑简明,在确定故障阈值时不会采用大量的数据进行运算,可以有效节省时 间。同时,采用模型输出的结果的可解释性较差,在模型输出错误结果时, 不能确定模型出现错误结果的原因。本公开对音频信息进行特征提取后获得的特征向量以及对应的故障阈值,得出故障指数,可以确定水轮机的当前状 态,若在判断水轮机运行状态时发生错误,一般情况下,可以判定是采集音 频信息的传感器发生故障,因此,本公开的方案具有较高的可解释性。
另外,在水轮机所处环境不同的情况下,模型需要重新训练,而重新训 练的过程会再次花费大量时间和数据,而在水轮机所处环境对本公开方案的 影响较小,本公开适用于不同的环境中,增强了方案的鲁棒性。
在一些实施例中,对音频信息进行特征提取,得到多个特征向量的步骤, 包括:
将音频信息分别进行时域变换和频域变换,获得多个特征向量。
具体地,时域变换是根据音频信息内的数据片段进行自相关函数变换, 从而用于检验混在随机噪声中的周期信号。频域变换是将复杂的时间信号或 空间信号变换成以频率成分表示的结构形式,是机械设备故障诊断中使用的 最为广泛的处理方法,因为故障发生时往往会引起信号频率结构的变化,而 通过频率信息的分析,可对许多故障原因作出解释和阐述,频域变换一般以 直角坐标形式的频谱图表示变换的结果,可以直观地看出机械设备开始出现 故障信号的周期。
在一些实施例中,多个特征向量包括多个时域特征向量以及多个频域特 征向量,将音频信息分别进行时域变换和频域变换,获得多个特征向量的步 骤,包括:
根据多个时域特征公式分别对音频信息进行运算,得到多个时域特征向 量;根据多个频域特征公式分别对音频信息进行运算,得到多个频域特征向 量;其中,每个时域特征公式对应一个时域特征向量,每个频域特征公式对 应一个频域特征向量。
具体地,在根据时域特征公式和频域特征公式对音频信息进行计算前, 对音频信息进行分段处理。
将音频信息按照第一预设长度进行分段,获得第一采样信息,第一采样 信息中包括多个相同长度的信号段,根据不同的时域特征公式对第一采样信 息进行计算,可以获得每个时域特征公式对应时域特征向量。例如,在预设 时长为60s、采样频率为96KHz的情况下,采样点数为5.76×10
将音频信息按照第二预设长度进行分段,获得第二采样信息,第二采样 信息中包括多个相同长度的信号段,根据不同的频域特征公式对第二采样信 息进行计算,可以获得每个频域特征公式对应频域特征向量。例如,在预设 时长为60s、采样频率为96KHz的情况下,采样点数为5.76×10
其中,时域特征公式可以包括时域最大值公式、时域峰值公式、时域标 准差公式、时域峰度公式、时域歪度公式、时域能量公式以及过零率公式。 频域特征公式可以包括频谱熵公式、频谱质心公式、频谱峰值公式、频谱偏 斜度公式、频谱平直度公式、频谱延展度公式以及频谱衰减度公式。
设采样后得到的某个信号段的采样点序列为x,x
时域最大值(Temporal Maximum,TM)表征了时域某一个信号段中采 样点的最大值,时域最大值越大表示该信号段的音量越大,时域最大值最高 可以取到1,时域最大值公式如下:
TM=max(x
其中,max(x
时域峰值(Temporal Peak,TP)是时域最大值与时域最小值之间的额差 值,用于描述信号波形变化范围,时域峰值越大表示信号段的变化越大,时 域峰值公式如下。
TP=max(xi)-min(x
其中,min(x
时域标准差(Temporal Standard Deviation,TSD)表征信号段中采样点 分布的离散程度,时域标准差越大表示采样点的分布得越离散,反之则表示 分布得越集中,时域标准差公式如下:
其中,mean表示时域平均值,
时域峰度(Temporal kurtosis,TK)是信号段波形峰度的一种度量,同 时也是该信号段的四阶矩,时域峰度越大表示该片段的信号的形状越陡峭, 时域峰度公式如下:
时域歪度(Temporal Skewness,TS)是关于信号的波形摆动水平的不对 称性的度量,同时在统计学上,时域歪度也是波形的三阶矩,时域歪度的值 为正表示信号的形状左偏,值为负表示信号的形状右偏,时域歪度公式如下:
时域能量(Temporal Energy,TE)可以反映出信号段内信号的能量的大 小,当信号的能量增大时,音频的音量也会增大,时域能量公式如下:
过零率(Zero-Crossing Rate,ZCR)是在一个信号段内,信号符号变化 的频率的度量方法,也就是穿过时间坐标轴的频率,可以用于估计信号段的 频率,过零率公式如下:
频谱熵(Spectral Entropy,SE)可以用于描述信号段频谱的能量分布情 况,频谱熵越大表示混乱度越大,计算时将频谱视作概率密度分布,然后根 据香农熵的方式计算频谱熵,频谱熵公式如下:
其中,s
频谱质心(Spectral Centroid,SC)表征信号段中频谱质量中心的分布情 况,可以用于描述声音中洪亮的成分的分布情况,频谱质心公式如下:
其中,f
频谱峰值(Spectral Crest,SCR)决定了频谱中幅值的尖峰的大小,可 以用于辨别音频中的和声与音调,频谱峰值公式如下:
频谱偏斜度(Spectral Slope,SS):频谱偏斜度是信号段中频谱分布偏 斜程度的度量,信号段频谱的偏斜程度越大频谱偏斜度的值越高,频谱偏斜 度公式如下:
其中,μs为信号段中幅度值的平均值,μf为信号段中频率值的平均值。
频谱平直度(Spectral Flatness,SF):频谱平直度是信号片段频谱平直 程度的度量,信号段的频谱在形态上越平直,频谱平直度越大,频谱平直度 公式如下:
频谱延展度(Spectral Spread,SSP)可以用于描述信号段的带宽,频谱 延展度公式如下:
其中,μ1为信号段的频谱质心的值。
频谱衰减度(Spectral Decrease,SD)是信号段频谱幅值的衰减程度的 度量,频谱衰减度越大信号段的频谱幅值下降得越大,频谱衰减度公式如下:
其中,S
在一些实施例中,根据多个特征向量以及每个特征向量对应的故障阈值, 确定故障指数的步骤,包括:
在多个特征向量中的任意一个特征向量超出对应的故障阈值的情况下, 确定该特征向量的故障值为1;
在多个特征向量中的任意一个特征向量未超出对应的故障阈值的情况 下,确定该特征向量的故障值为0;
根据多个特征向量对应的故障值,确定故障指数。
具体地,在多个特征向量中,一个特征向量可以对应一个故障阈值,或 者一个特征向量对应两个故障阈值。而一个音频信息中的多个信号段中,每 个信号段可以根据时域特征公式以及频域特征公式得到对应的时域特征向 量和频域特征向量。例如,时域最大值中,每个信号段对应一个时域最大值, 在多个时域最大值中确定的一个最大值为TMmax,而多个时域最大值的标 准差为TMstd,将时域最大值对应的故障阈值设置为TMmax大于0.9以及 TMstd大于0.08。
同理,将时域峰值对应的故障阈值设置为TPmax大于0.168以及TPstd 大于0.13,其中TPmax为多个时域峰值中的最大值,TPstd是多个时域峰值 的标准差。将时域标准差对应的故障阈值设置为TSDmax大于0.28以及 TSDstd大于0.016,TSDmax为多个时域标准差中的最大值,TSDstd是多个 时域标准差的标准差。将时域峰度对应的故障阈值设置为TKstd小于0.33, TKstd为多个时域峰度的标准差。将时域歪度对应的故障阈值设置为TSstd 小于0.18,TSstd为多个时域歪度的标准差。将时域能量对应的故障阈值设 置为TEmax大于0.06以及TEstd大于0.006,TEmax是多个时域能量中的最 大值,TEstd是多个时域能量的标准差。将过零率对应的故障阈值设置为 ZCRmax大于0.02以及ZCRstd大于0.002,ZCRmax是多个过零率中的最大 值,ZCRstd是多个过零率的标准差。
将频谱熵对应的故障阈值设置为SEmax小于-35200以及SEstd大于 1500,SEmax为多个频谱熵中的最大值,SEstd是多个频谱熵的标准差。将 频谱质心对应的故障阈值设置为SCstd大于4200,SCstd是多个频谱质心的 标准差。将频谱峰值对应的故障阈值设置为SCRstd大于37,SCRstd是多个 频谱峰值的标准差。将频谱偏斜度对应的故障阈值设置为SSmin小于 -6.5×10
如上所述,每一个特征向量对应了一项或两项故障阈值,如时域最大值 对应两个故障阈值,上述共例举了23项故障阈值。超过故障阈值的值对应 的故障指数为1,未超过的为0,可知故障指数的范围是0至23,在故障指 数为0的情况下,说明水轮机未发生故障,故障指数越大,说明水轮机发生 故障的程度越大。
上述列举的每个参数对应的数值仅为示例性说明,不应解释为对某一个 参数的限制。
在一些实施例中,根据多个特征向量对应的故障值,确定故障指数的步 骤,包括:
将多个特征向量的对应的故障值之和作为故障指数。
在一些实施例中,根据故障指数,确定水轮机的当前状态的步骤,包括:
在故障指数小于第一阈值的情况下,确定水轮机的当前状态为正常运行 状态;
在故障指数处于第一阈值以及第二阈值的情况下,确定水轮机的当前状 态为弱故障状态;
在故障指数大于第二阈值的情况下,确定水轮机的当前状态为强故障状 态。
具体地,根据故障指数的数值可以将水轮机运行状态对应分为三个阶段。 其中,在正常运行状态下,可以不对水轮机做任何处理;在弱故障状态下, 可以在水轮机未工作状态下进行检修;而在强故障状态下,立即控制水轮机 停止运行,并进行检修或直接更换。第一阈值可以为6,第二阈值15。即, 故障指数为0至6的情况下,水轮机的当前状态为正常运行状态;故障指数 为7至15的情况下,水轮机为弱故障状态;故障指数为16至23的情况下, 水轮机为强故障状态。
在一些实施例中,方法还包括:
每预设时长内,获取水轮机的多个样本音频信息,样本音频信息是水轮 机在正常状态下的音频信息;
对多个样本音频信息进行特征提取,得到多组样本特征向量,其中,每 个样本音频信息对应一组样本特征向量;
对每组样本特征向量进行计算,得到每组样本特征向量对应的初始故障 阈值;
将多个初始故障阈值的平均值作为故障阈值。
具体地,在水轮机正常运行时,多次获取水轮机的样本音频信息,每预 设时长内获取一个样本音频信息,每个样本音频信息的长度相等,样本音频 信息的数量可以是10个,这10个样本音频信息可以是随机的。对多个样本 音频信息进行特征提取,同样是采用时域变换和频域变换得到多组样本特征 向量,其中,一个音频信息对应一组样本特征向量,每组样本特征向量中有 多个样本特征向量。根据样本特征向量可以得到对应的故障阈值,例如,一 组时域特征向量中,多个时域最大值的最大值分别为0.92、0.88以及0.9, 则将时域最大值中所有最大值的平均值为0.9作为对应的故障阈值。又例如, 多个时域峰度的标准差分别为0.35、0.33以及0.31,将时域峰度的标准差平 均值0.33作为故障阈值。
请参阅图2,图2是根据一示例性实施例示出的一种水轮机故障监测装 置500,如图2所示,该装置包括:
获取模块510,用于在水轮机运行过程中,获取水轮机在预设时长内的 音频信息;
获得模块520,用于对音频信息进行特征提取,得到多个特征向量;
第一确定模块530,用于根据多个特征向量以及每个特征向量对应的故 障阈值,确定故障指数;
第二确定模块540,用于根据故障指数,确定水轮机的当前状态。
在一些实施例中,获得模块520包括:
获得子模块,用于将音频信息分别进行时域变换和频域变换,获得多个 特征向量。
在一些实施例中,获得子模块具体用于:
将音频信息按第一预设长度进行分段,获得多个第一采样信息;
根据多个第一采样信息以及时域特征公式,计算得到每个第一采样信息 对应的特征值;
将音频信息按第二预设长度进行分段,获得多个第二采样信息;
根据多个第二采样信息以及频域变换公式,计算得到每个第二采样信息 对应的特征值;
根据多个第一采样信息对应的特征值以及多个第二采样信息对应的特 征值,获得多个特征向量。
在一些实施例中,第一确定模块530包括:
第一子模块,用于在多个特征向量中的任意一个特征向量超出对应的故 障阈值的情况下,确定该特征向量的故障值为1;
第二子模块,用于在多个特征向量中的任意一个特征向量未超出对应的 故障阈值的情况下,确定该特征向量的故障值为0;
第三子模块,用于根据多个特征向量对应的故障值,确定故障指数。
在一些实施例中,第三子模块具体用于:
将多个特征向量的对应的故障值之和作为故障指数。
在一些实施例中,第二确定模块540具体用于:
在故障指数小于第一阈值的情况下,确定水轮机的当前状态为正常运行 状态;
在故障指数处于第一阈值以及第二阈值的情况下,确定水轮机的当前状 态为弱故障状态;
在故障指数大于第二阈值的情况下,确定水轮机的当前状态为强故障状 态。
在一些实施例中,该装置还包括:
样本获取模块,用于在水轮机处于正常运行状态下,每预设时长内,获 取水轮机的多个样本音频信息,样本音频信息是水轮机在正常状态下的音频 信息;
特征提取模块,用于对多个样本音频信息进行特征提取,得到多组样本 特征向量,其中,每个样本音频信息对应一组样本特征向量;
计算模块,用于对每组样本特征向量进行计算,得到每组样本特征向量 对应的初始故障阈值;
阈值确定模块,用于将多个初始故障阈值的平均值作为故障阈值。
关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有 关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
为了实现上述目的,本公开还提供了一种电子设备,包括:
存储器,其上存储有计算机程序;
处理器,用于执行存储器中的计算机程序,以实现上述第一方面方法的 步骤。
图3是根据一示例性实施例示出的一种电子设备700的框图。如图3所 示,该电子设备700可以包括:处理器701,存储器702。该电子设备700 还可以包括多媒体组件703,输入/输出(I/O)接口704,以及通信组件705 中的一者或多者。
其中,处理器701用于控制该电子设备700的整体操作,以完成上述的 水轮机故障监测方法中的全部或部分步骤。存储器702用于存储各种类型的 数据以支持在该电子设备700的操作,这些数据例如可以包括用于在该电子 设备700上操作的任何应用程序或方法的指令,以及应用程序相关的数据, 例如联系人数据、收发的消息、图片、音频、视频等等。该存储器702可以 由任何类型的易失性或非易失性存储设备或者它们的组合实现,例如静态随 机存取存储器(Static Random Access Memory,简称SRAM),电可擦除可 编程只读存储器(Electrically Erasable Programmable Read-Only Memory,简 称EEPROM),可擦除可编程只读存储器(Erasable Programmable Read-Only Memory,简称EPROM),可编程只读存储器(Programmable Read-Only Memory,简称PROM),只读存储器(Read-Only Memory,简称ROM), 磁存储器,快闪存储器,磁盘或光盘。多媒体组件703可以包括屏幕和音频 组件。其中屏幕例如可以是触摸屏,音频组件用于输出和/或输入音频信号。 例如,音频组件可以包括一个麦克风,麦克风用于接收外部音频信号。所接 收的音频信号可以被进一步存储在存储器702或通过通信组件705发送。音 频组件还包括至少一个扬声器,用于输出音频信号。I/O接口704为处理器 701和其他接口模块之间提供接口,上述其他接口模块可以是键盘,鼠标, 按钮等。这些按钮可以是虚拟按钮或者实体按钮。通信组件705用于该电子 设备700与其他设备之间进行有线或无线通信。无线通信,例如Wi-Fi,蓝 牙,近场通信(NearField Communication,简称NFC),2G、3G、4G、NB-IOT、 eMTC、或其他5G等等,或它们中的一种或几种的组合,在此不做限定。 因此相应的该通信组件705可以包括:Wi-Fi模块,蓝牙模块,NFC模块等 等。
在一示例性实施例中,电子设备700可以被一个或多个应用专用集成电 路(Application Specific Integrated Circuit,简称ASIC)、数字信号处理器 (DigitalSignal Processor,简称DSP)、数字信号处理设备(Digital Signal Processing Device,简称DSPD)、可编程逻辑器件(Programmable Logic Device, 简称PLD)、现场可编程门阵列(Field Programmable Gate Array,简称FPGA)、 控制器、微控制器、微处理器或其他电子元件实现,用于执行上述的水轮机 故障监测方法。
在另一示例性实施例中,还提供了一种包括程序指令的计算机可读存储 介质,该程序指令被处理器执行时实现上述的水轮机故障监测方法的步骤。 例如,该计算机可读存储介质可以为上述包括程序指令的存储器702,上述 程序指令可由电子设备700的处理器701执行以完成上述的水轮机故障监测 方法。
在另一示例性实施例中,还提供一种计算机程序产品,该计算机程序产 品包含能够由可编程的装置执行的计算机程序,该计算机程序具有当由该可 编程的装置执行时用于执行上述的水轮机故障监测方法的代码部分。
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限 于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开 的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征, 在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的 重复,本公开对各种可能的组合方式不再另行说明。
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其 不违背本公开的思想,其同样应当视为本公开所公开的内容。
- 确定机械故障和机械故障补偿的方法、装置、设备及介质
- 通信设备电源故障分析的方法、装置、设备及存储介质
- 网络页面更改监测方法、装置、设备以及介质
- 运行监测方法、装置、电子设备及计算机可读存储介质
- 应用性能监测方法、装置、计算机设备和存储介质
- 设备绕组绝缘故障监测方法、装置、计算机设备和介质
- 目标设备故障监测方法、装置、电子设备及介质