一种夜间海上舰船自动识别方法、系统、电子设备及介质
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及图像识别与计算机视觉技术领域,特别是涉及一种夜间海上舰船自动识别方法、系统、电子设备及介质。
背景技术
舰船灯光是海洋夜间灯光的主要来源。在夜间无云状况下,利用卫星微光成像仪可有效观测海上灯光辐射,进而识别出海上舰船位置。海上舰船呈现在夜间微光影像上是一系列非临近分布的高辐射值“亮点”。因此,夜间舰船自动识别算法的核心思路是通过微光辐射峰值检测提取出图像中的非临近“亮点”。
Croft(1978)发现依托卫星微光成像仪,可在夜间无云状况下实现对使用大功率照明设备进行集鱼、诱鱼的灯光渔船进行监测。根据近海灯光渔船在DNB微光影像上的辐射特征,Elvidge等(2015)提出了基于峰值检测以及固定阈值分割的近海灯光渔船识别方法,但对于集鱼灯功率较大的远洋灯光渔船,其集鱼灯所处像元的临近像元亦可能被大功率集鱼灯照亮而具有较高的辐射值,从而产生误识;且固定阈值分割主要依据人为经验,具有一定的随机性和局限性。
发明内容
本发明的目的是提供一种夜间海上舰船自动识别方法、系统、电子设备及介质,可提高夜间海上舰船的识别精度。
为实现上述目的,本发明提供了如下方案:
一种夜间海上舰船自动识别方法,包括:
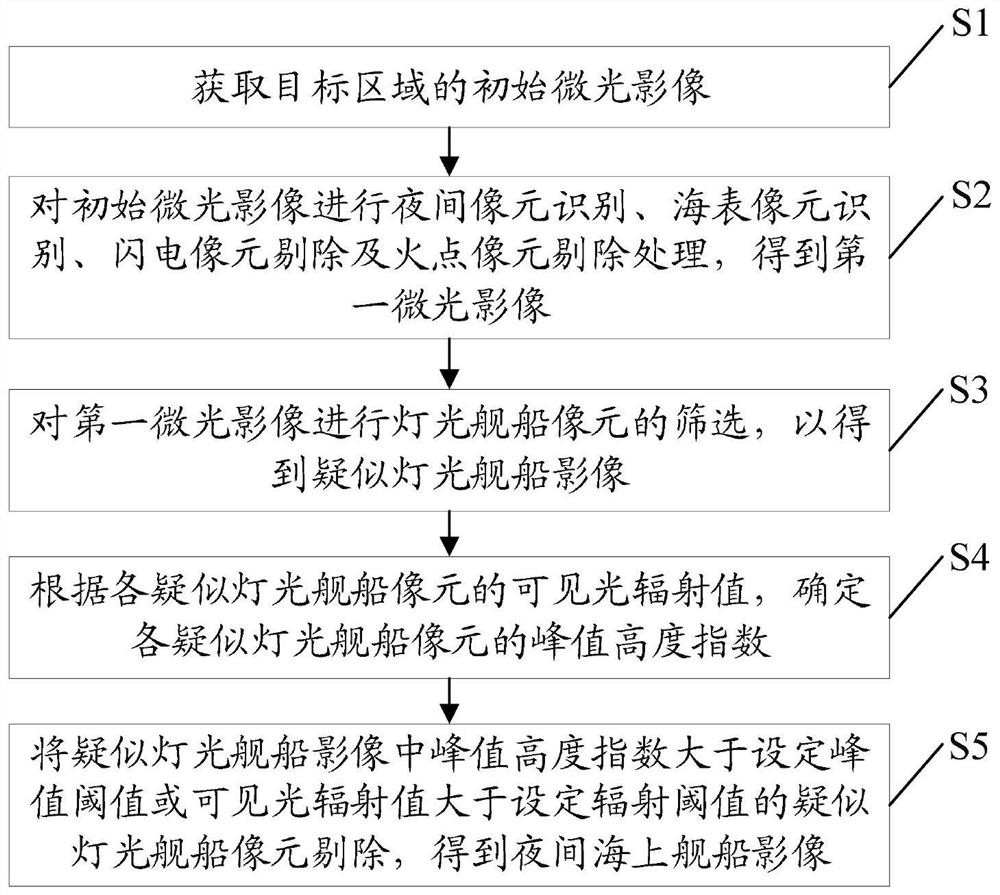
获取目标区域的初始微光影像;
对所述初始微光影像进行夜间像元识别、海表像元识别、闪电像元剔除及火点像元剔除处理,得到第一微光影像;
对所述第一微光影像进行灯光舰船像元的筛选,以得到疑似灯光舰船影像;所述疑似灯光舰船影像中包括疑似灯光舰船像元及疑似灯光舰船像元的可见光辐射值;
根据各疑似灯光舰船像元的可见光辐射值,确定各疑似灯光舰船像元的峰值高度指数;
将所述疑似灯光舰船影像中峰值高度指数大于设定峰值阈值或可见光辐射值大于设定辐射阈值的疑似灯光舰船像元剔除,得到夜间海上舰船影像。
可选地,所述获取目标区域的初始微光影像,具体包括:
采用可见光红外成像辐射仪采集目标区域的初始微光影像。
可选地,所述初始微光影像中包括多个像元以及各像元对应的M10波段数据和DNB波段数据;
所述对所述初始微光影像进行夜间像元识别、海表像元识别、闪电像元剔除及火点像元剔除处理,得到第一微光影像,具体包括:
针对所述初始微光影像中的任一像元,判断所述像元的DNB波段数据对应的太阳天顶角是否大于设定太阳天顶角阈值,若是,则所述像元为夜间像元,否则将所述像元剔除,以得到夜间微光影像;
基于陆地/海洋静态地理数据库,根据所述夜间微光影像中各夜间像元的DNB波段数据对应的定位数据,从所述夜间微光影像中筛选出海表像元,以得到海表微光影像;
根据所述海表微光影像中各海表像元的DNB波段数据,确定所述海表微光影像中的闪电像元;
针对所述海表微光影像中的任一海表像元,判断所述海表像元的M10波段数据对应的辐射强度是否大于设定辐射阈值,若是,则所述海表像元为火点像元;
将所述海表微光影像中的闪电像元及火点像元剔除,得到第一微光影像。
可选地,所述第一微光影像中包括多个夜间海表像元及各夜间海表像元对应的DNB波段数据;
所述对所述第一微光影像进行灯光舰船像元的筛选,以得到疑似灯光舰船影像,具体包括:
采用中值滤波法对所述第一微光影像中各夜间海表像元对应的DNB波段数据进行平滑处理,得到平滑影像;
将所述第一微光影像与所述平滑影像作差,得到灯光舰船特征化影像;所述灯光舰船特征化影像中包括各夜间海表像元的峰值中值指数;
采用最大熵法,根据所述灯光舰船特征化影像中各夜间海表像元的峰值中值指数,对所述灯光舰船特征化影像进行自适应阈值分割,以得到初步疑似灯光舰船影像;
采用局部峰值检测算法,对所述初步疑似灯光舰船影像进行局部峰值检测,确定局部峰值像元;
将所述初步疑似灯光舰船影像中的局部峰值像元剔除,得到疑似灯光舰船影像;所述疑似灯光舰船影像中包括灯光舰船像元。
可选地,所述根据各疑似灯光舰船像元的可见光辐射值,确定各疑似灯光舰船像元的峰值高度指数,具体包括:
针对任一疑似灯光舰船像元,根据所述疑似灯光舰船像元的可见光辐射值及所述疑似灯光舰船像元上下两个邻近像元的可见光辐射值,确定所述疑似灯光舰船像元的峰值高度指数。
可选地,采用以下公式,确定疑似灯光舰船像元n的峰值高度指数:
其中,SHI
可选地,所述初始微光影像中包括多个像元以及各像元对应的M10波段数据和DNB波段数据;
在对所述初始微光影像进行夜间像元识别、海表像元识别、闪电像元剔除及火点像元剔除处理,得到第一微光影像之前,所述夜间海上舰船自动识别方法还包括:
采用线性插值法,对所述初始微光影像中各像元对应的M10波段数据中的缺省值进行填充处理;
对所述DNB波段数据进行辐射拉伸及噪声滤除处理。
为实现上述目的,本发明还提供了如下方案:
一种夜间海上舰船自动识别系统,包括:
数据获取单元,用于获取目标区域的初始微光影像;
初步处理单元,与所述数据获取单元连接,用于对所述初始微光影像进行夜间像元识别、海表像元识别、闪电像元剔除及火点像元剔除处理,得到第一微光影像;
疑似舰船确定单元,与所述初步处理单元连接,用于对所述第一微光影像进行灯光舰船像元的筛选,以得到疑似灯光舰船影像;所述疑似灯光舰船影像中包括疑似灯光舰船像元及疑似灯光舰船像元的可见光辐射值;
指数确定单元,与所述疑似舰船确定单元连接,用于根据各疑似灯光舰船像元的可见光辐射值,确定各疑似灯光舰船像元的峰值高度指数;
舰船确定单元,与所述指数确定单元连接,用于将所述疑似灯光舰船影像中峰值高度指数大于设定峰值阈值或可见光辐射值大于设定辐射阈值的疑似灯光舰船像元剔除,得到夜间海上舰船影像。
为实现上述目的,本发明还提供了如下方案:
一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的夜间海上舰船自动识别方法。
为实现上述目的,本发明还提供了如下方案:
一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的夜间海上舰船自动识别方法。
根据本发明提供的具体实施例,本发明公开了以下技术效果:首先获取目标区域的初始微光影像,对初始微光影像进行夜间像元识别、海表像元识别、闪电像元剔除及火点像元剔除处理,得到第一微光影像,有效排除了海上闪电及火点对检测结果的干扰;然后对第一微光影像进行灯光舰船像元的筛选,以得到疑似灯光舰船影像,再根据各疑似灯光舰船像元的可见光辐射值,确定各疑似灯光舰船像元的峰值高度指数,将疑似灯光舰船影像中峰值高度指数大于设定峰值阈值或可见光辐射值大于设定辐射阈值的疑似灯光舰船像元剔除,进而得到夜间海上舰船影像,进一步排除了电离层高能粒子等高亮目标对检测结果的干扰,提高了海上舰船的识别准确率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明夜间海上舰船自动识别方法的流程图;
图2为夜间海上舰船识别过程的整体示意图;
图3为本发明夜间海上舰船自动识别系统的示意图。
符号说明:
数据获取单元-1,初步处理单元-2,疑似舰船确定单元-3,指数确定单元-4,舰船确定单元-5。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种夜间海上舰船自动识别方法、系统、电子设备及介质,通过对像元类型的初步判别以及电离层高能粒子的剔除,能够有效排除海上闪电、火点、电离层高能粒子等高亮目标对检测结果的干扰,提高海上舰船的识别准确率。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
实施例一
如图1和图2所示,本发明夜间海上舰船自动识别方法包括:
S1:获取目标区域的初始微光影像。具体地,采用可见光红外成像辐射仪采集目标区域的初始微光影像。所述初始微光影像中包括多个像元以及各像元对应的M10波段数据和DNB(可见光)波段数据。
在本实施例中,M10波段数据和DNB波段数据都来自于S-NPP和NOAA-20卫星上的VIIRS可见光红外成像辐射仪。本发明以DNB波段数据为主识别海上灯光船舶,M10波段数据辅助用于排除海上火点的干扰。
卫星微光成像仪(可见光红外成像辐射仪)在进行数据处理时,对于缺失值一般填充为999.9和-999.9,而这些数据并无实际含义,为了保证数据的有效性以及减少后续计算的复杂度,需要对这些缺失值进行处理。因此,在步骤S2之前,先采用线性插值法,对所述初始微光影像中各像元对应的M10波段数据中的缺省值进行填充处理。在具体实际应用中,还可对经过线性插值之后得到的数据进行像元空间匹配。并对所述DNB波段数据进行辐射拉伸及噪声滤除处理。
DNB SDR(Sensor Data Records)数据的原始辐射单位为W·cm
DNB在扫描成像过程中,由于扫描角度的变化,易受到白噪声的影响,且扫描带边缘噪声水平高于星下点。因此,本实施例选用自适应维纳滤波器对DNB波段数据进行滤波降噪处理。通过计算初始微光影像中DNB波段3×3邻域内辐射值的均方差,依据最小均方差准则实现最优滤波,对白噪声有良好的滤除效果。
S2:对所述初始微光影像进行夜间像元识别、海表像元识别、闪电像元剔除及火点像元剔除处理,得到第一微光影像。所述第一微光影像中包括多个夜间海表像元及各夜间海表像元对应的DNB波段数据。
进一步地,步骤S2具体包括:
S21:针对所述初始微光影像中的任一像元,判断所述像元的DNB波段数据对应的太阳天顶角是否大于设定太阳天顶角阈值,若是,则所述像元为夜间像元,否则将所述像元剔除,以得到夜间微光影像。在本实施例中,太阳天顶角阈值为100°。若像元的DNB波段数据对应的太阳天顶角大于100°则为夜间像元,否则表示此像元为白天或者晨昏时段,将此像元剔除,以排除干扰。
S22:基于陆地/海洋静态地理数据库,根据所述夜间微光影像中各夜间像元的DNB波段数据对应的定位数据,从所述夜间微光影像中筛选出海表像元,以得到海表微光影像。
具体地,陆地/海洋静态地理数据库中定义了地球上哪些位置是陆地,哪些位置是海洋,即,陆地/海洋静态地理数据库中包括经纬度信息和陆地、海表标识。DNB波段数据的定位数据中也有位置信息。通过比对各夜间像元的DNB波段数据对应的定位数据与陆地/海洋静态地理数据库中海表经纬度信息,即可筛选出海表像元,以避免陆地像元对后续识别的干扰。
S23:根据所述海表微光影像中各海表像元的DNB波段数据,确定所述海表微光影像中的闪电像元。具体地,闪电识别是基于闪电在DNB波段数据中呈现16行水平亮带的特征,本实施例通过设定合适的阈值识别海表微光影像中的闪电像元。
S24:针对所述海表微光影像中的任一海表像元,判断所述海表像元的M10波段数据对应的辐射强度是否大于设定辐射阈值,若是,则所述海表像元为火点像元。海上火点主要是油气燃烧,夜晚海上油气燃烧在1.61μm通道附近(M10)有很强的辐射能量,而灯光舰船则在M10通道辐射信号很弱,因此,本发明利用该原理设定合适的辐射阈值,即可从M10波段数据中识别出海上的火点像元。
S25:将所述海表微光影像中的闪电像元及火点像元剔除,得到第一微光影像。
S3:对所述第一微光影像进行灯光舰船像元的筛选,以得到疑似灯光舰船影像。所述疑似灯光舰船影像中包括疑似灯光舰船像元及疑似灯光舰船像元的可见光辐射值。
进一步地,步骤S3中首先采用SMI(Spike Median Index,峰值中值指数)对灯光舰船与背景像元间的辐射差异进行放大。具体包括:
S31:采用中值滤波法对所述第一微光影像中各夜间海表像元对应的DNB波段数据进行平滑处理,得到平滑影像。在本实施例中,使用3×3中值滤波器对DNB波段数据进行平滑处理。
S32:将所述第一微光影像与所述平滑影像作差,得到灯光舰船特征化影像。所述灯光舰船特征化影像中包括各夜间海表像元的峰值中值指数。峰值中值指数可进一步放大DNB波段中“亮点”与背景像元间的差异,构成灯光舰船的特征化影像。
S33:采用最大熵法,根据所述灯光舰船特征化影像中各夜间海表像元的峰值中值指数,对所述灯光舰船特征化影像进行自适应阈值分割,以得到初步疑似灯光舰船影像。
S34:采用局部峰值检测算法,对所述初步疑似灯光舰船影像进行局部峰值检测,确定局部峰值像元。
最大熵法可以实现影像中“亮点”与背景像元间的最优阈值分割,但实际情况中,并非所有的“亮点”均为灯光渔船。初步疑似灯光舰船影像的空间分辨率为742m×742m,对于灯光功率较大的舰船,其灯光除照亮舰船自身所处像元外,还可能导致其临近像元亦被照亮,从而在影像上也呈现为高辐射值的“亮点”,导致在阈值分割中被误识为灯光舰船。
本发明采用局部峰值检测算法从最大熵阈值分割结果中各“亮点”间的空间临近关系出发,寻找并去除这些非灯光舰船的“亮点”,从而达到准确提取出灯光舰船的目的。
S35:将所述初步疑似灯光舰船影像中的局部峰值像元剔除,得到疑似灯光舰船影像。所述疑似灯光舰船影像中包括灯光舰船像元。
具体地,局部峰值检测算法的实现步骤如下:
(1)将初步疑似灯光舰船影像中首行像元定义为像元i,其余像元分别定义为像元j
(2)初步疑似灯光舰船影像的空间分辨率为742m,因此若i、j间的距离不超过742m,则表明像元i、j为临近像元,且光传播过程中其能量随距离增加而逐渐衰减,所以将两像元中SMI值较大的像元定义为像元i,将SMI值较小的像元删除,并依次循环,直至搜索不到与像元i距离在742m以内的像元时,将最后一个像元i输出为a1,同时将其从原CSV文件(初步疑似灯光舰船影像的文件)中删除。
(3)完成输出像元a1的过程后,将CSV文件所剩余像元中的首行像元定义为像元i,重复步骤(2),直至CSV文件中所有像元均被删除,其对应输出结果(所有的a1)即为灯光舰船所处像元。
S4:根据各疑似灯光舰船像元的可见光辐射值,确定各疑似灯光舰船像元的峰值高度指数。
具体地,针对任一疑似灯光舰船像元,根据所述疑似灯光舰船像元的可见光辐射值及所述疑似灯光舰船像元上下两个邻近像元的可见光辐射值,确定所述疑似灯光舰船像元的峰值高度指数。
即采用以下公式,确定疑似灯光舰船像元n的峰值高度指数:
其中,SHI
S5:将所述疑似灯光舰船影像中峰值高度指数大于设定峰值阈值或可见光辐射值大于设定辐射阈值的疑似灯光舰船像元剔除,得到夜间海上舰船影像。
经过局部峰值检测后得到的疑似灯光舰船像元,还需排除电离层高能粒子的干扰。电离层高能粒子在DNB波段呈现比灯光舰船更强的辐射能量,将顺利通过前面的检测步骤。本发明通过设置较高的SHI(Spike HeightIndex,峰值高度指数)阈值(取0.995)和DNB辐射阈值(1000nW·cm
此外,通过电离层高能粒子判别后的灯光舰船像元,可另行设置SHI阈值最终判定判别强、弱检测(SHI>0.75为判定为强检测,SHI≤0.75判定为弱检测)。强检测对应更高的可信度,弱检测对应相对较低的可信度。
本发明利用卫星微光数据自动识别出夜间海上舰船,相比现有技术,增加了像元类型初步判别和电离层高能粒子剔除两个步骤,能够有效排除海上闪电、火点、电离层高能粒子等高亮目标对检测结果的干扰,提高海上舰船的识别准确率。
在一个具体实施例中,选取UTC 2012/09/20~2012/09/23的4个时次和UTC 2019/06/01/17:51某海域附近的夜间灯光船舶共计5个时次样例,通过将本发明对灯光船舶的检测结果与Elvidge等发布的VBD夜间船舶检测产品做对比,验证了本发明方法的可行性。从以上5个时次的验证结果可知,针对上述海域,本发明识别出的灯光船舶与原始微光影像的亮点分布相似度较高,且与Elvidge等发布的最近时次VBD夜间船舶检测产品在船舶的空间位置分布上总体上一致性较好,表明本发明提供的夜间海上舰船自动识别方法具有可行性。
实施例二
为了执行上述实施例一对应的方法,以实现相应的功能和技术效果,下面提供一种夜间海上舰船自动识别系统。
如图3所示,本实施例提供的夜间海上舰船自动识别系统包括:数据获取单元1、初步处理单元2、疑似舰船确定单元3、指数确定单元4及舰船确定单元5。
其中,数据获取单元1用于获取目标区域的初始微光影像。
初步处理单元2与所述数据获取单元1连接,初步处理单元2用于对所述初始微光影像进行夜间像元识别、海表像元识别、闪电像元剔除及火点像元剔除处理,得到第一微光影像。
疑似舰船确定单元3与所述初步处理单元2连接,疑似舰船确定单元3用于对所述第一微光影像进行灯光舰船像元的筛选,以得到疑似灯光舰船影像。所述疑似灯光舰船影像中包括疑似灯光舰船像元及疑似灯光舰船像元的可见光辐射值。
指数确定单元4与所述疑似舰船确定单元3连接,指数确定单元4用于根据各疑似灯光舰船像元的可见光辐射值,确定各疑似灯光舰船像元的峰值高度指数。
舰船确定单元5与所述指数确定单元4连接,舰船确定单元5用于将所述疑似灯光舰船影像中峰值高度指数大于设定峰值阈值或可见光辐射值大于设定辐射阈值的疑似灯光舰船像元剔除,得到夜间海上舰船影像。
实施例三
本实施例提供一种电子设备,包括存储器及处理器,存储器用于存储计算机程序,处理器运行计算机程序以使电子设备执行实施例一的夜间海上舰船自动识别方法。
可选地,上述电子设备可以是服务器。
另外,本发明实施例还提供一种计算机可读存储介质,其存储有计算机程序,该计算机程序被处理器执行时实现实施例一的夜间海上舰船自动识别方法。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种行人重识别方法、系统及电子设备和存储介质
- 一种用于图书盘点的彩色条码、图书识别方法、电子设备及存储介质
- 一种漆面识别方法、装置、存储介质及电子设备
- 一种虚假主叫识别方法、装置、电子设备及存储介质
- 用户身份识别方法、装置、系统、电子设备及可读介质
- 一种夜间地面火情自动识别方法、系统、电子设备及介质
- 夜间红外场景目标识别方法、装置、电子设备及存储介质