少驱动多层耦合混联机构
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于并联机构技术领域,特别涉及一类少驱动多层耦合具有大工作空间的混联机构。
背景技术
串联机构因其结构具有承载能力小、精度差、工作空间大、灵活性好等特点。而并联机构在性能上与串联机构互补,具有承载能力大、刚度精度高、工作空间小等特点。由多个并联机构串联形成的混联机构兼具并联机构和串联机构的优点,受到学者的广泛关注与研究。但目前此类机构中每层并联机构均需要安装驱动元件,导致混联机构整体笨重、驱动复杂。因此,通过结构设计减少驱动元件和整体重量成为重点研究方向。
专利CN202110116056.3提出了一种少驱动多自由度输出冗余并联机构及控制方法,该发明通过冗余支链控制运动支链减少了驱动部件,降低了控制难度,且承载能力大,但其工作空间也相对减小。专利CN202120075105.9提出将滑块机构连接上下两个结构相同的并联机构的从动杆和驱动杆,将上一级的输出定量地传递给下一级作为输入,增加了机构的工作空间,但机构的刚度相对较低。专利CN201020569030.1提出了一种由三自由度并联机构和四自由度并联机构串联而成的用于汽车喷涂的混联机器人,该发明结构紧凑、刚度高、易于实现高速运动,但是该发明整体结构较为复杂,不易于广泛使用。
为了有效改善上述问题,本发明提出一类少驱动多层耦合混联机构,旨在通过结构设计,减少驱动元件的使用,使混联机构结构紧凑,轻巧灵活,操作方便,更加适用于实际工程的需要。
发明内容
对现有技术存在的问题,本发明提供一类少驱动多级耦合混联机构,通过构建闭环支链实现相邻层并联机构间的耦合,达到减少驱动元件的目的,使得混联机构更加轻便灵活、操作方便、易于实现模块化。
本发明采用的技术方案是,一种少驱动多层耦合混联机构,其包括能多层叠加的3-R(SSS(R))型模块化并联机构以及耦合连接的3-RSR型末端并联机构,能多层叠加的3-R(SSS(R))型模块化并联机构包括定平台、多个动平台和沿周向均布的R(SSS(R))串联分支,所述R(SSS(R))串联分支设于所述定平台与动平台之间并设于所述相邻两个动平台之间,所述每条R(SSS(R))串联分支均包括第一转动副、第一连杆、第一球铰、第二连杆、第二球铰、第三球铰、第三连杆和第一复合运动副,其中第一层3-R(SSS(R))并联机构中第一连杆的下端通过所述第一转动副与所述定平台连接,且靠近所述第一连杆上端的上连接部通过所述第一球铰与所述第二连杆的下端连接,所述第二连杆的上端通过所述第二球铰与所述相邻3-R(SSS(R))并联机构中第一连杆的下端连接,且所述第一连杆的上端通过所述第三球铰与所述第三连杆的下端连接,所述第三连杆的上端通过所述第一复合运动副与所述相邻3-R(SSS(R))并联机构中靠近第一连杆下端的下连接部以及所述动平台连接;所述第一层中的第三球铰由三个轴线相交于一点且作独立的相对转动的转动副构成,所述第一复合运动副是由两个共轴的转动副组成;所述相邻两层3-R(SSS(R))并联机构之间共用所述第一连杆以及动平台,且最后一层3-R(SSS(R))并联机构中靠近第一连杆上端的上连接部通过所述第一球铰与所述第二连杆的下端连接,所述第二连杆的上端通过所述第二球铰与所述3-RSR并联机构中第四连杆的下端连接,且所述第一连杆的上端通过所述第三球铰与所述第三连杆的下端连接,所述第三连杆的上端通过所述第一复合运动副与所述3-RSR并联机构中靠近第四连杆下端的下连接部以及所述动平台连接;所述3-RSR并联机构设于所述多层3-R(SSS(R))并联机构的末端,且所述3-RSR并联机构包括沿周向均布的RSR串联分支和末端动平台,所述每条RSR串联分支均包括第四连杆、第四球铰、第五连杆和第二转动副,且所述第四连杆的上端通过所述第四球铰与所述第五连杆的下端连接,所述第五连杆的上端通过所述第二转动副与所述末端动平台连接,且所述多层3-R(SSS(R))并联机构与所述3-RSR并联机构耦合连接共同构成三自由度n(3-R(SSS(R)))+3-RSR型少驱动多层耦合混联机构。
进一步地,所述第一连杆、第二连杆、第三连杆以及所述相邻3-R(SSS(R))并联机构中的第一连杆共同构成闭环支链;所述第一连杆、第二连杆、第三连杆以及所述相邻3-RSR并联机构中的第四连杆共同构成闭环支链。
本发明的第二方面采用的技术方案是,一种少驱动多层耦合混联机构,其包括能多层叠加的3-R(RRS(S))型模块化并联机构以及耦合连接的3-RSR型末端并联机构,能多层叠加的3-R(RRS(S))型模块化并联机构包括定平台、多个动平台和沿周向均布的R(RRS(S))串联分支,所述R(RRS(S))串联分支设于所述定平台与动平台之间并设于所述相邻两个动平台之间,所述每条R(RRS(S))串联分支均包括第一转动副、第一连杆、第二转动副、第二连杆、第三转动副、第三连杆、第一球铰和第二复合运动副,其中第一层3-R(RRS(S))并联机构中第一连杆的下端通过所述第一转动副与所述定平台连接,且靠近所述第一连杆上端的上连接部通过所述第二转动副与所述第二连杆的下端连接,所述第二连杆的上端通过所述第三转动副与所述相邻3-R(RRS(S))并联机构中第一连杆的下端连接,且所述第一连杆的上端通过所述第一球铰与所述第三连杆的下端连接,所述第三连杆的上端通过所述第二复合运动副与所述相邻3-R(RRS(S))并联机构中靠近第一连杆下端的下连接部以及所述动平台连接;所述第一层中的第一球铰由三个轴线相交于一点且作独立的相对转动的转动副构成,所述第二复合运动副是由一个转动副和一个球铰组成;所述相邻两层3-R(RRS(S))并联机构之间共用所述第一连杆以及动平台,且最后一层3-R(RRS(S))并联机构中靠近第一连杆上端的上连接部通过所述第二转动副与所述第二连杆的下端连接,所述第二连杆的上端通过所述第三转动副与所述3-RSR并联机构中第四连杆的下端连接,且所述第一连杆的上端通过所述第一球铰与所述第三连杆的下端连接,所述第三连杆的上端通过所述第二复合运动副与所述3-RSR并联机构中靠近第四连杆下端的下连接部以及所述动平台连接;所述3-RSR并联机构设于所述多层3-R(RRS(S))并联机构的末端,且所述3-RSR并联机构包括沿周向均布的RSR串联分支和末端动平台,所述每条RSR串联分支均包括第四连杆、第二球铰、第五连杆和第四转动副,且所述第四连杆的上端通过所述第二球铰与所述第五连杆的下端连接,所述第五连杆的上端通过所述第四转动副与所述末端动平台连接,且所述多层3-R(RRS(S))并联机构与所述3-RSR并联机构耦合连接共同构成三自由度n(3-R(RRS(S)))+3-RSR型少驱动多层耦合混联机构。
进一步地,所述第一连杆、第二连杆、第三连杆以及所述相邻3-R(RRS(S))并联机构中的第一连杆共同构成闭环支链;第一连杆、第二连杆、第三连杆以及所述相邻3-RSR并联机构中的第四连杆共同构成闭环支链。
本发明的第三方面采用的技术方案是,一种少驱动多层耦合混联机构,其包括能多层叠加的3-R(RSR(S))型模块化并联机构以及耦合连接的3-RRS型末端并联机构,所述能多层叠加的3-R(RSR(S))型模块化并联机构包括定平台、多个动平台和沿周向均布的R(RSR(S))串联分支,所述R(RSR(S))串联分支设于所述定平台与动平台之间并设于所述相邻两个动平台之间,所述每条R(RSR(S))串联分支均包括第一转动副、第一连杆、第二转动副、第二连杆、第一球铰、第三连杆、第三转动副和第三复合运动副,其中第一层3-R(RSR(S))并联机构中第一连杆的下端通过所述第一转动副与所述定平台连接,且靠近所述第一连杆上端的上连接部通过所述第二转动副与所述第二连杆的下端连接,所述第二连杆的上端通过所述第一球铰与所述相邻3-R(RSR(S))并联机构中第一连杆的下端连接,且所述第一连杆的上端通过所述第三转动副与所述第三连杆的下端连接,所述第三连杆的上端通过所述第三复合运动副与所述相邻3-R(RSR(S))并联机构中靠近第一连杆下端的下连接部以及所述动平台连接,所述第三复合运动副是由一个转动副和一个球铰组成;所述相邻两层3-R(RSR(S))并联机构之间共用所述第一连杆以及动平台,且最后一层3-R(RSR(S))并联机构中靠近第一连杆上端的上连接部通过所述第二转动副与所述第二连杆的下端连接,所述第二连杆的上端通过所述第一球铰与所述3-RRS并联机构中第四连杆的下端连接,且所述第一连杆的上端通过所述第三转动副与所述第三连杆的下端连接,所述第三连杆的上端通过所述第三复合运动副与所述3-RRS并联机构中靠近第四连杆下端的下连接部以及所述动平台连接;所述3-RRS并联机构设于所述多层3-R(RSR(S))并联机构的末端,且所述3-RRS并联机构包括沿周向均布的RRS串联分支和末端动平台,所述每条RRS串联分支均包括第四连杆、第四转动副、第五连杆和第二球铰,且所述第四连杆的上端通过所述第四转动副与所述第五连杆的下端连接,所述第五连杆的上端通过所述第二球铰与所述末端动平台连接,且所述多层3-R(RSR(S))并联机构与所述3-RRS并联机构耦合连接共同构成三自由度n(3-R(RSR(S)))+3-RRS型少驱动多层耦合混联机构。
进一步地,所述第一连杆、第二连杆、第三连杆以及所述相邻3-R(RSR(S))并联机构中的第一连杆共同构成闭环支链;第一连杆、第二连杆、第三连杆以及所述相邻3-RRS并联机构中的第四连杆共同构成闭环支链。
本发明的第四方面采用的技术方案是,一种少驱动多层耦合混联机构,其包括能多层叠加的3-R(SSR(S))型模块化并联机构以及耦合连接的3-RRS型末端并联机构,所述能多层叠加的3-R(SSR(S))型模块化并联机构包括定平台、多个动平台和沿周向均布的R(SSR(S))串联分支,所述R(SSR(S))串联分支设于所述定平台与动平台之间并设于所述相邻两个动平台之间,所述每条R(SSR(S))串联分支均包括第一转动副、第一连杆、第一球铰、第二连杆、第二球铰、第三连杆、第二转动副和第四复合运动副,其中第一层3-R(SSR(S))并联机构中第一连杆的下端通过所述第一转动副与所述定平台连接,且靠近所述第一连杆上端的上连接部通过所述第一球铰与所述第二连杆的下端连接,所述第二连杆的上端通过所述第二球铰与所述相邻3-R(SSR(S))并联机构中第一连杆的下端连接,且所述第一连杆的上端通过所述第二转动副与所述第三连杆的下端连接,所述第三连杆的上端通过所述第四复合运动副与所述相邻3-R(SSR(S))并联机构中靠近第一连杆下端的下连接部以及所述动平台连接;所述第四复合运动副是由一个转动副和一个球铰组成;所述相邻两层3-R(SSR(S))并联机构之间共用所述第一连杆以及动平台,且最后一层3-R(SSR(S))并联机构中靠近第一连杆上端的上连接部通过所述第一球铰与所述第二连杆的下端连接,所述第二连杆的上端通过所述第二球铰与所述3-RRS并联机构中第四连杆的下端连接,且所述第一连杆的上端通过所述第二转动副与所述第三连杆的下端连接,所述第三连杆的上端通过所述第四复合运动副与所述3-RRS并联机构中靠近第四连杆下端的下连接部以及所述动平台连接;所述3-RRS并联机构设于所述多层3-R(SSR(S))并联机构的末端,且所述3-RRS并联机构包括沿周向均布的RRS串联分支和末端动平台,所述每条RRS串联分支均包括第四连杆、第三转动副、第五连杆和第三球铰,且所述第四连杆的上端通过所述第三转动副与所述第五连杆的下端连接,所述第五连杆的上端通过所述第三球铰与所述末端动平台连接,且所述多层3-R(SSR(S))并联机构与所述3-RRS并联机构耦合连接共同构成三自由度n(3-R(SSR(S)))+3-RRS型少驱动多层耦合混联机构。
进一步地,所述第一连杆、第二连杆、第三连杆以及所述相邻3-R(SSR(S))并联机构中的第一连杆共同构成闭环支链;第一连杆、第二连杆、第三连杆以及所述相邻3-RRS并联机构中的第四连杆共同构成闭环支链。
本发明的特点和有益效果是:
1、本发明提供的一类少驱动多层耦合混联机构,通过构建闭环支链产生耦合运动实现多层并联机构的运动传递,从而减少了驱动元件的使用,该多层并联机构仅通过驱动第一层中的驱动件,即可实现混联机构的运动控制,使得混联机构更加轻便灵活。
2、本发明提供的一类少驱动多层耦合混联机构,结构紧凑、机构对称性好、驱动数目少、容易控制,具有能够多层叠加布置、且易于实现模块化、进一步增大机构的工作空间等优点,适用于物料的搬运、包装和分拣。
附图说明
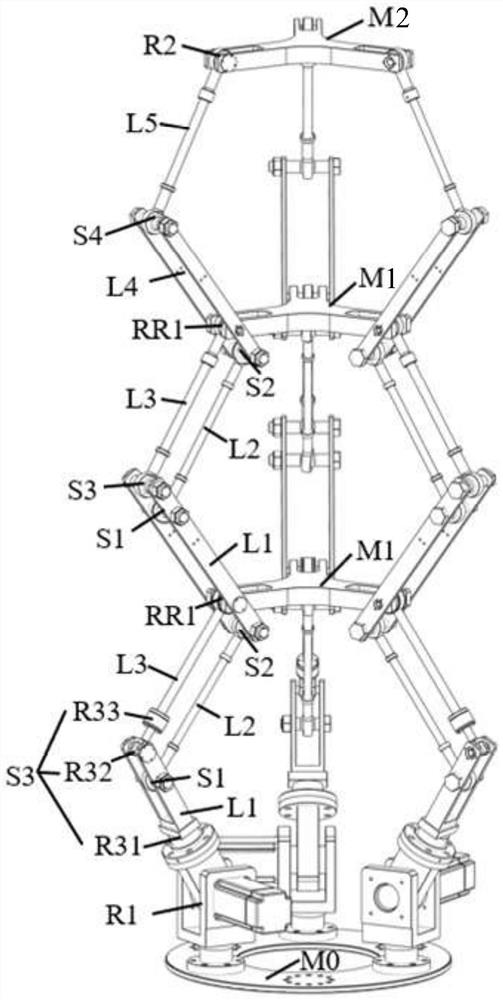
图1是本发明实施例1的n(3-R(SSS(R)))+3-RSR型少驱动多层耦合混联机构的结构示意图;
图2是本发明实施例2的n(3-R(RRS(S)))+3-RSR型少驱动多层耦合混联机构中RRS(S)闭环支链的结构示意图;
图3是本发明实施例3的n(3-R(RSR(S)))+3-RRS型少驱动多层耦合混联机构中RSR(S)闭环支链的结构示意图;
图4是本发明实施例4的n(3-R(SSR(S)))+3-RRS型少驱动多层耦合混联机构中SSR(S)闭环支链的结构示意图。
主要附图标记:
定平台M0;动平台M1;末端动平台M2;连杆L、球铰S、转动副R。
具体实施方式
为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
实施例1
本发明提供一种少驱动多层耦合混联机构,如图1所示,其包括两层叠加的3-R(SSS(R))型模块化并联机构以及耦合连接的3-RSR型末端并联机构,两层叠加的3-R(SSS(R))型模块化并联机构定平台M0、多个动平台M1和设于定平台M0与动平台M1之间以及相邻两个动平台M1之间的三条结构相同且沿周向均布的R(SSS(R))串联分支,每条R(SSS(R))串联分支均包括第一转动副R1、第一连杆L1、第一球铰S1、第二连杆L2、第二球铰S2、第三球铰S3、第三连杆L3和第一复合运动副RR1,其中第一层3-R(SSS(R))并联机构中第一连杆L1的下端通过第一转动副R1与定平台M0连接,且定平台M0上设有电机,电机的输出轴轴线与第一转动副R1轴线共线,且靠近第一连杆L1上端的上连接部通过第一球铰S1与第二连杆L2的下端连接,第二连杆L2的上端通过第二球铰S2与第二层3-R(SSS(R))并联机构中第一连杆L1的下端连接,且第一连杆L1的上端通过第三球铰S3与第三连杆L3的下端连接,其中第三球铰S3由三个轴线相交于一点且作独立的相对转动的转动副R31、R32、R33构成,第三连杆L3的上端通过第一复合运动副RR1与第二层3-R(SSS(R))并联机构中靠近第一连杆L1下端的下连接部以及动平台M1连接,且第一复合运动副RR1是由两个共轴的转动副组成。
第一层和第二层3-R(SSS(R))并联机构之间共用第一连杆L1以及动平台M1,且第二层3-R(SSS(R))并联机构中靠近第一连杆L1上端的上连接部通过第一球铰S1与第二连杆L2的下端连接,第二连杆L2的上端通过第二球铰S2与3-RSR并联机构中第四连杆L4的下端连接,且第一连杆L1的上端通过第三球铰S3与第三连杆L3的下端连接,第三连杆L3的上端通过第一复合运动副RR1与3-RSR并联机构中靠近第四连杆L4下端的下连接部以及动平台M1连接。其中第一层3-R(SSS(R))并联机构中第一连杆L1、第二连杆L2、第三连杆L3以及第二层3-R(SSS(R))并联机构中第一连杆L1共同构成闭环支链;第二层3-R(SSS(R))并联机构中第一连杆L1、第二连杆L2、第三连杆L3以及第三层3-RSR并联机构中第四连杆L4共同构成闭环支链。
3-RSR并联机构设于两层3-R(SSS(R))并联机构的末端,且3-RSR并联机构包括三条结构相同且沿周向均布的RSR串联分支和末端动平台M2,每条RSR串联分支均包括第四连杆L4、第四球铰S4、第五连杆L5和第二转动副R2,且第四连杆L4的上端通过第四球铰S4与第五连杆L5的下端连接,第五连杆L5的上端通过第二转动副R2与末端动平台M2连接,且多层3-R(SSS(R))并联机构与3-RSR并联机构耦合连接共同构成具有两转动一移动三个自由度的n(3-R(SSS(R)))+3-RSR型少驱动多层耦合混联机构。
实施例2
本发明提供一种少驱动多层耦合混联机构,如图2所示,其包括能多层叠加的3-R(RRS(S))型模块化并联机构以及耦合连接的3-RSR型末端并联机构。参照实施例1,能多层叠加的3-R(RRS(S))型模块化并联机构包括定平台M0、多个动平台M1和设于定平台M0与动平台M1之间以及相邻两个动平台M1之间的三条结构相同且沿周向均布的R(RRS(S))串联分支,每条R(RRS(S))串联分支均包括第一转动副R1、第一连杆L1、第二转动副R2、第二连杆L2、第三转动副R3、第三连杆L3、第一球铰S1和第二复合运动副RS1,其中第一层3-R(RRS(S))并联机构中第一连杆L1的下端通过第一转动副R1与定平台M0连接,且定平台M0上设有电机,电机的输出轴轴线与第一转动副R1轴线共线,且靠近第一连杆L1上端的上连接部通过第二转动副R2与第二连杆L2的下端连接,第二连杆L2的上端通过第三转动副R3与相邻3-R(RRS(S))并联机构中第一连杆L1的下端连接,且第一连杆L1的上端通过第一球铰S1与第三连杆L3的下端连接,其中第一球铰S1由三个轴线相交于一点且作独立的相对转动的转动副R11、R12、R12构成,第三连杆L3的上端通过第二复合运动副RS1与相邻3-R(RRS(S))并联机构中靠近第一连杆L1下端的下连接部以及动平台M1连接,其中第二复合运动副RS1是由一个转动副R和一个球铰S组成。
相邻两层3-R(RRS(S))并联机构之间共用第一连杆L1以及动平台M1,且最后一层3-R(RRS(S))并联机构中靠近第一连杆L1上端的上连接部通过第二转动副R2与第二连杆L2的下端连接,第二连杆L2的上端通过第三转动副R3与3-RSR并联机构中第四连杆L4的下端连接,且第一连杆L1的上端通过第一球铰S1与第三连杆L3的下端连接,第三连杆L3的上端通过第二复合运动副RS1与3-RSR并联机构中靠近第四连杆L4下端的下连接部以及动平台M1连接。其中第一层3-R(RRS(S))并联机构中第一连杆L1、第二连杆L2、第三连杆L3以及第二层3-R(RRS(S))并联机构中第一连杆L1共同构成闭环支链;第二层3-R(RRS(S))并联机构中第一连杆L1、第二连杆L2、第三连杆L3以及第三层3-R(RRS(S))并联机构中第四连杆L4共同构成闭环支链。
3-RSR并联机构设于多层3-R(RRS(S))并联机构的末端,且3-RSR并联机构包括三条结构相同且沿周向均布的RSR串联分支和末端动平台M2,每条RSR串联分支均包括第四连杆L4、第二球铰S2、第五连杆L5和第四转动副,且第四连杆L4的上端通过第二球铰S2与第五连杆L5的下端连接,第五连杆L5的上端通过第四转动副与末端动平台M2连接,其杆件的连接关系与实施例1中的3-RSR并联机构相同,且多层3-R(RRS(S))并联机构与3-RSR并联机构耦合连接共同构成具有两转动一移动三个自由度的n(3-R(RRS(S)))+3-RSR型少驱动多层耦合混联机构。
实施例3
本发明提供一种少驱动多层耦合混联机构,如图3所示,其包括能多层叠加的3-R(RSR(S))型模块化并联机构以及耦合连接的3-RRS型末端并联机构。参照实施例1,能多层叠加的3-R(RSR(S))型模块化并联机构包括定平台M0、多个动平台M1和设于定平台M0与动平台M1之间以及相邻两个动平台M1之间的三条结构相同且沿周向均布的R(RSR(S))串联分支,每条R(RSR(S))串联分支均包括第一转动副R1、第一连杆L1、第二转动副R2、第二连杆L2、第一球铰S1、第三连杆L3、第三转动副R3和第三复合运动副RS1,其中第一层3-R(RSR(S))并联机构中第一连杆L1的下端通过第一转动副R1与定平台M0连接,且第一连杆L1上的上连接部通过第二转动副R2与第二连杆L2的下端连接,第二连杆L2的上端通过第一球铰S1与相邻3-R(RSR(S))并联机构中第一连杆L1的下端连接,且第一连杆L1的上端通过第三转动副R3与第三连杆L3的下端连接,第三连杆L3的上端通过第三复合运动副RS1与相邻3-R(RSR(S))并联机构中靠近第一连杆L1下端的下连接部以及动平台M1连接,其中第三复合运动副RS1是由一个球铰S和一个转动副R组成。
相邻两层3-R(RSR(S))并联机构之间共用第一连杆L1以及动平台M1,且最后一层3-R(RSR(S))并联机构中靠近第一连杆L1上端的上连接部通过第二转动副R2与第二连杆L2的下端连接,第二连杆L2的上端通过第一球铰S1与3-RRS并联机构中第四连杆L4的下端连接,且第一连杆L1的上端通过第三转动副R3与第三连杆L3的下端连接,第三连杆L3的上端通过第三复合运动副RS1与3-RRS并联机构中靠近第四连杆L4下端的下连接部以及动平台M1连接。其中第一层3-R(RSR(S))并联机构中第一连杆L1、第二连杆L2、第三连杆L3以及第二层3-R(RSR(S))并联机构中第一连杆L1共同构成闭环支链;第二层3-R(RSR(S))并联机构中第一连杆L1、第二连杆L2、第三连杆L3以及第三层3-R(RSR(S))并联机构中第四连杆L4共同构成闭环支链。
3-RRS并联机构设于多层3-R(RSR(S))并联机构的末端,参照实施例1中的3-RSR并联机构,如图1所示。且3-RRS并联机构包括三条结构相同且沿周向均布的RRS串联分支和末端动平台M2,每条RRS串联分支均包括第四连杆L4、第四转动副、第五连杆L5和第二球铰S2,且第四连杆L4的上端通过第四转动副与第五连杆L5的下端连接,第五连杆L5的上端通过第二球铰S2与末端动平台M2连接,且多层3-R(RSR(S))并联机构与3-RRS并联机构耦合连接共同构成具有两转动一移动三个自由度的n(3-R(RSR(S)))+3-RRS型少驱动多层耦合混联机构。
实施例4
本发明提供一种少驱动多层耦合混联机构,如图4所示,其包括能多层叠加的3-R(SSR(S))型模块化并联机构以及耦合连接的3-RRS型末端并联机构。参照实施例1,能多层叠加的3-R(SSR(S))型模块化并联机构包括定平台M0、多个动平台M1和设于定平台M0与动平台M1之间以及相邻两个动平台M1之间的三条结构相同且沿周向均布的R(SSR(S))串联分支,每条R(SSR(S))串联分支均包括第一转动副R1、第一连杆L1、第一球铰S1、第二连杆L2、第二球铰S2、第三连杆L3、第二转动副R2和第四复合运动副RS1,其中第一层3-R(SSR(S))并联机构中第一连杆L1的下端通过第一转动副R1与定平台M0连接,且靠近第一连杆L1上端的上连接部通过第一球铰S1与第二连杆L2的下端连接,第二连杆L2的上端通过第二球铰S2与相邻3-R(SSR(S))并联机构中第一连杆L1的下端连接,且第一连杆L1的上端通过第二转动副R2与第三连杆L3的下端连接,第三连杆L3的上端通过第四复合运动副RS1与相邻3-R(SSR(S))并联机构中靠近第一连杆L1下端的下连接部以及动平台M1连接,其中第四复合运动副RS1是由一个转动副R和一个球铰S组成。
相邻两层3-R(SSR(S))并联机构之间共用第一连杆L1以及动平台M1,且最后一层3-R(SSR(S))并联机构中靠近第一连杆L1上端的上连接部通过第一球铰S1与第二连杆L2的下端连接,第二连杆L2的上端通过第二球铰S2与3-RRS并联机构中第四连杆L4的下端连接,且第一连杆L1的上端通过第二转动副R2与第三连杆L3的下端连接,第三连杆L3的上端通过第四复合运动副RS1与3-RRS并联机构中靠近第四连杆L4下端的下连接部以及动平台M1连接。其中第一层3-R(SSR(S))并联机构中第一连杆L1、第二连杆L2、第三连杆L3以及第二层3-R(SSR(S))并联机构中第一连杆L1共同构成闭环支链;第二层3-R(SSR(S))并联机构中第一连杆L1、第二连杆L2、第三连杆L3以及第三层3-R(SSR(S))并联机构中第四连杆L4共同构成闭环支链。
3-RRS并联机构设于多层3-R(SSR(S))并联机构的末端,参照实施例1中的3-RSR并联机构,如图1所示。且3-RRS并联机构包括三条结构相同且沿周向均布的RRS串联分支和末端动平台M2,每条RRS串联分支均包括第四连杆L4、第三转动副R3、第五连杆L5和第三球铰S3,且第四连杆L4的上端通过第三转动副R3与第五连杆L5的下端连接,第五连杆L5的上端通过第三球铰S3与末端动平台M2连接,且多层3-R(SSR(S))并联机构与3-RRS并联机构耦合连接共同构成具有两转动一移动三个自由度的n(3-R(SSR(S)))+3-RRS型少驱动多层耦合混联机构。
本发明提供的一类少驱动多层耦合混联机构,通过构建的闭环支链使得相邻两层并联机构之间实现耦合运动,将上一层的运动传递至下一层机构,依照此方法在多层混联机构间增加相同的耦合关系,使得机构间运动逐层传动,进一步增大了机构的工作空间,减少了驱动单元的使用,该多层混联机构仅通过驱动第一层中的转动副,即可实现混联机构的运动控制。使得混联机构能够多层叠加,易于实现模块化,具有结构紧凑、机构对称性好、驱动数目少、结构轻便灵活、容易控制等优点。
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 用于水下仿生推进系统的混联驱动机构
- 一种混联式平面少自由度虚拟轴机床
- 一种混联式平面少自由度虚拟轴机床