一种路网子区划分及子区边界流量控制方法
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及城市交通规划与管理中交通控制的技术领域,具体但不限于涉及一种路网子区划分及子区边界流量控制方法。
背景技术
持续激增的汽车保有量使城市交通面临的压力越来越大,城市交通拥堵现象也越来越普遍,特别是在大中城市交通拥堵问题更为严重。根据高德地图发布的《2020年度中国主要城市交通分析报告》,在所监测的全国361个城市中,在通勤高峰时,处于拥堵状态的城市数量占比为2.49%,处于缓行状态的城市数量占比为37.67%,其余城市处于畅通运行状态。同时根据高德地图交通大数据监测的50个主要城市结果显示,2020年全国50个主要城市的平均路网高峰行程延时指数为1.609,其中南京市路网高峰行程延时指数为1.769,即高峰时段出行时间是畅通时段出行时间的1.769倍。如今,交通拥堵对人们日常生活的影响越来越大,城市居民每天产生的拥堵成本也在逐渐增加。面对城市高密度路网区域内部交通拥堵问题日益突出的现象,必须采取有效的交通控制措施对进入路网中的交通流量进行控制,这样才能有效的减少高密度路网区域内道路交通拥堵。
针对控制交通流量、缓解拥堵,现有技术主要针对道路点、路段的运行状况,对象局限于微观层面,所选取的交通状态指标也多是用来表征路段或者交叉口的运行状态,并不能很好的反映路网整体的交通运行状况,与区域交通控制策略的关联性不强。此外,现有技术在对路网边界交通进行控制时,很少涉及到边界控制时机的决策,在控制时多以子区状态最优或车辆完成率最大为目标,而并没有考虑子区间相对交通状态对边界控制策略制定的影响。
针对当前研究的不足,需要着眼于交通子区而非道路点、路段的运行情况,从而拓展宏观层面交通流量控制的技术方法,反映路网整体的运行状况。在控制思路上,需要考虑整体区域的交通运行状态最优,而非局限于单一子区的交通状态为技术优化目标,从而流量控制对各个子区的综合影响。基于如上考虑,构建一种新的控制模型和控制策略,以期解决现有的至少部分问题。
发明内容
针对现有技术中的一个或多个问题,本发明提出了一种路网子区划分及子区边界流量控制方法,包括划分交通子区、识别各交通子区路网交通状态的等级、判断各交通子区流量输入型/流量输出型的类别、构建各交通子区博弈控制模型和各交通子区边界流量控制模型,计算求解得到各交通子区边界流量控制策略,实现在交通子区层面进行交通流量控制。
实现本发明目的的技术解决方案为:
根据本发明的一个方面,一种路网子区划分及子区边界流量控制方法,包括:
步骤1、划分交通子区:获得路网数据集合X={x
步骤2、划分各交通子区的交通状态等级:根据各交通子区的路网交通数据,计算各交通子区的路网通畅度和路网空间负荷裕度,其中,路网畅通度是指在区域路网内某一时刻路网内处于畅通状态的路段数与区域内所有路段数的比值,反映该区域内路网的整体畅通程度,路网空间负荷裕度是指在区域路网内某一时刻区域路网剩余的交通容量与路网极限容量的比值,反映了某一时刻路网内剩余空间资源情况;
以子区路网通畅度和子区路网空间负荷裕度数据为输入,利用NJW谱聚类算法,将子区路网通畅度和子区路网空间负荷裕度划分为若干组别,表征不同的子区交通状态,并基于此划分子区路网交通状态等级;
基于SVM支持向量机算法,基于当前子区路网交通状态等级数据,建构子区路网交通状态识别分类器;
步骤3、判断各交通子区的流入流出类型:利用子区路网交通状态识别分类器识别各子区交通状态等级,根据各子区交通状态等级,确定流量输出型子区和流量输入型子区,其中,流量输入型子区是指在边界控制时进入该子区的车辆数大于流出该子区的车辆数,流量输出型子区是指在边界控制时进入该子区的车辆数小于流出该子区的车辆数;
步骤4、构建路网子区博弈控制模型:路网子区博弈控制模型包括子区内部车流平衡模型,并构建子区平均延误函数;
步骤5、判断受控路网子区实际最佳累计车辆数,构建子区边界流量控制模型,模型优化目标为区域整体因流量调控的收益最大化,模型约束条件包括各交通子区内累计车辆数净增加值约束、子区之间边界控制交通量约束,使用遗传算法或模拟退火算法求解模型,得到最优的子区边界流量控制方案。
进一步的,本发明的路网子区划分及子区边界流量控制方法,步骤1中交通子区划分方法包含两个阶段,第一阶段基于ACO蚁群算法,确定初始聚类个数和初始聚类中心;第二阶段以ACO蚁群算法输出的初始聚类个数和聚类中心为基础,利用FCM模糊C均值聚类算法对路网中的路段进行二次聚类,最终得到路网子区划分结果。各阶段的主要内容说明如下:
第一阶段为利用蚁群算法ACO确定初始聚类中心和聚类个数,具体包括以下步骤:
(1)获得路网数据集合:将路段中心横坐标、路段中心纵坐标、路段平均车流密度、路段平均车流量作为样本数据,获取路网数据集合X={x
(2)随机选择c个路段作为初始聚类中心,计算路段x
计算路段x
其中,r为聚类半径;
计算路段x
S∈{x
其中,S为已经在聚类中心c
(3)将路段x
π
其中,t表示迭代次数,π
更新聚类中心
其中,J为聚类中心
(4)输出聚类个数c和聚类中心c
当总体偏离误差D小于预设参数ε
第二阶段为以ACO蚁群算法输出的初始聚类个数和聚类中心为基础,使用模糊C均值算法FCM对路网进行二次聚类,最终得到路网子区划分结果,具体包括以下步骤:
(1)以第一阶段蚁群算法输出的聚类中心c
(2)根据当前聚类中心,更新隶属度矩阵U
计算并更新每类的聚类中心c
(3)根据更新的聚类中心c
(4)设当前迭代次数为第t次,计算第t次迭代的隶属度矩阵U
进一步的,本发明的路网子区划分及子区边界流量控制方法,步骤2中子区路网交通状态识别包含三个阶段,具体包括如下:
第一阶段为计算子区路网通畅度和子区路网空间负荷裕度,路网畅通率是指在区域路网内,某一时刻路网内处于畅通状态的路段数与区域内所有路段数的比值,路网畅通率是对区域内路段畅通等级的数理统计结果,反映了该区域内路网的整体畅通程度。路网通畅度的计算公式如下:
其中,R
表1路段交通状态等级划分标准
单位:km/h
路网空间负荷裕度是指在区域路网内,某一时刻区域路网剩余的交通容量与路网极限容量的比值,路网空间负荷裕度表明了区域路网道路资源在空间上的剩余承载力,反映了某一时刻路网内剩余空间资源情况。路网空间负荷裕度的计算公式如下:
其中,S
第二阶段为利用NJW谱聚类算法,基于子区路网通畅度和子区路网空间负荷裕度数据,划分不同子区交通状态类别,各类子区交通状态在子区路网通畅度和子区路网空间负荷裕度上具有不同的特征,本阶段没有对NJW谱聚类算法的步骤进行更改,不再进行说明。
第三阶段为利用SVM支持向量机数据学习聚类获得的各类子区交通状态的子区路网通畅度和子区路网空间负荷裕度上特征,获得子区路网交通状态识别分类器,具体分类包含:畅通、基本畅通、轻度拥堵、中度拥堵、严重拥堵。本阶段没有对SVM谱聚类算法的步骤进行更改,不再进行说明。
进一步的,本发明的路网子区划分及子区边界流量控制方法,步骤4中构建子区内部车流平衡模型具体包括:
步骤(1)、建立子区内部车流平衡方程,分解子区内累计车辆数的构成;
步骤(2)、根据累计车辆数的构成状况,计算多子区博弈情况下的子区内车辆的延误时间 T
进一步的,本发明的路网子区划分及子区边界流量控制方法,步骤4具体包括以下步骤:
对于任意子区j,子区内部车流平衡方程如下:
N
其中,N
根据平衡方程,子区j内的累计车辆数由如下构成:
①子区j在上一时刻内部累计车辆数N
②子区j在Δt时段内内部车流转移量q
③子区j在Δt时段内流入子区j的车辆数与流出子区j的车辆数的差值(I
进一步的,本发明的路网子区划分及子区边界流量控制方法,对于任意子区j,平均延误的计算方法为:
首先计算路段i上车辆的平均延误T
其中,T
对于任一子区来说,其子区内部车辆平均延误
式中:a,b,c为待标定的参数,具体参数可以利用二次多项式拟合进行标定。N为路网子区内的累计车辆数;
子区j在博弈过程中的延误收益函数为:
其中,
进一步的,本发明的路网子区划分及子区边界流量控制方法,步骤5中包含两个阶段,第一阶段为判断受控路网子区实际最佳累计车辆数,第二阶段为构建并求解子区流量控制模型。具体如下:
第一阶段判断受控路网子区实际最佳累计车辆数包含3个方面:
(1)子区路网的加权流量
(2)根据宏观基本图MFD,当子区路网加权流量达到峰值q
(3)经过子区边界流量调控后,若子区j路网累计车辆数在其临界累计车辆数N
第二阶段构建并求解子区流量控制模型,包含两个步骤,一是构建子区流量控制模型,二是对模型进行求解,具体如下:
(1)子区流量控制模型如下:
其中,I
优化目标
约束条件包含子区内部累计车辆数净增加值的约束和子区之间边界控制交通量约束:
若子区j为流量输入型子区,则其子区内部累计车辆数净增加值的约束为
若子区j为流量输出型子区,子区内部累计车辆净增加值不得超过实际最佳累计车辆数 N
子区之间边界控制交通量约束控制子区之间的流量大小,对于子区k和子区j,若其不相邻,则q
(2)使用模拟退火算法求解上述模型,模型的决策变量为任意两个子区的边界调控流量,根据决策变量可以计算上述子区流量控制模型的各参数,并进而根据模拟退火算法求解得到最优子区流量控制方案。
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
本发明的路网子区划分及子区边界流量控制方法综合考虑交通子区划分、交通状态识别、交通子区交通延误和子区交通流量控制,最终能够改善交通路网整体的交通运行状态,减少路网各个子区的交通延误,提高运输效率。
附图说明
附图用来提供对本发明的进一步理解,与说明描述一起用于解释本发明的实施例,并不构成对本发明的限制。在附图中:
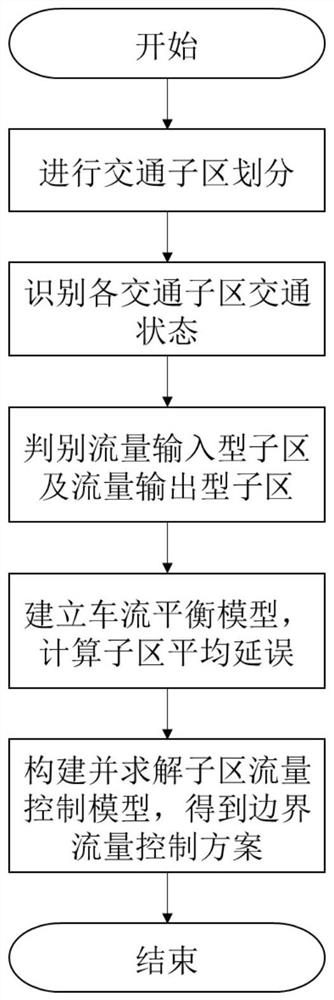
图1示出了本发明的路网子区划分及子区边界流量控制方法的流程图。
图2示出了本发明的路网子区划分及子区边界流量控制方法的交通子区划分的流程图。
图3示出了本发明实施例的研究区域范围示意图。
图4示出了本发明实施例的子区1路网通畅度、路网空间负荷裕度计算结果和状态划分示意图。
具体实施方式
为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
该部分的描述只针对典型的实施例,本发明并不仅局限于实施例描述的范围。不同实施例的组合、不同实施例中的一些技术特征进行相互替换,相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。
一种路网子区划分及子区边界流量控制方法,如图1所示,包含如下步骤:
步骤1、获得路网数据集合X={x
在本例中,使用南京市河西商圈核心地带路网,西起乐山路,东至泰山路,北起怡康街,南至楠溪江东街,如图3所示。基于本路网,使用交通仿真软件Vissim进行交通仿真,仿真初始时刻车流量为每车道每小时50辆车,随后从仿真时刻3600s开始,路网边界车流量输入每小时递增20%,直至仿真结束。路段中间设置数据采集检测器,输出包括路段编号,车道编号,路段各车道起点、终点坐标、路段长度、路段密度、路段速度等数据。基于此仿真数据,建立路网数据集X={x
步骤2、根据各个子区路网交通数据,计算子区路网通畅度和子区路网空间负荷裕度。以子区路网通畅度和子区路网空间负荷裕度数据为输入,利用NJW谱聚类算法,将子区路网通畅度和子区路网空间负荷裕度划分为若干组别,表征不同的子区交通状态,并基于此划分子区路网交通状态等级。基于SVM支持向量机算法,基于当前子区路网交通状态等级数据,建构子区路网交通状态识别分类器。利用Vissim仿真得到的结果,计算子区路网通畅度和空间负荷裕度,并利用NJW谱聚类算法和SVM支持向量机算法,得到子区交通状态划分标准,其中,子区1以路网通畅度和空间负荷裕度划分交通状态的结果如图4所示。
步骤3、利用子区路网交通状态识别分类器识别各子区交通状态等级,根据各子区的交通状态等级,确定流量输出型子区和流量输入型子区。其中,流量输入型子区是指:在边界控制时,进入该子区的车辆数大于流出该子区的车辆数;流量输出型子区是指:在边界控制时,进入该子区的车辆数小于流出该子区的车辆数。
步骤4、构建路网子区博弈控制模型,模型主要包含子区路网车流平衡模型,搭建子区平均延误函数。
其中对于任意子区j,其车流平衡方程为:
N
式中:
t为某一时刻;
Δt为时间步长;
N
q
I
O
对于任意子区j,其平均延误的计算方法为:首先计算路段i上车辆的平均延误T
式中:
T
v
l
对于任一子区来说,其子区内部车辆平均延误
式中:a,b,c为待标定的参数,具体参数可以利用二次多项式拟合进行标定。
子区j在博弈过程中的延误收益函数为:
式中:
N'
本例中,各子区的内部车辆平均延误的
表2各子区内部车辆平均延误
步骤5、构建并求解子区流量控制模型,模型的目标为区域整体因流量调控的收益最大化,模型约束包含累计车辆数净增加值约束、子区之间边界控制交通量约束,模型使用遗传算法、模拟退火算法等进化算法进行求解。
该步骤包含两个阶段,第一阶段为判断受控路网子区实际最佳累计车辆数,第二阶段为构建并求解子区流量控制模型。
第一阶段判断受控路网子区实际最佳累计车辆数包含3个方面:
(1)子区内任意路段i的流量为q
(2)根据宏观基本图MFD,当子区路网加权流量达到峰值q
(3)经过子区边界流量调控后,若子区j路网累计车辆数在其临界累计车辆数N
本例中宏观基本图的拟合结果及N
表3宏观基本图MFD的拟合结果及N
第二阶段构建并求解子区流量控制模型,包含两个步骤,一是构建子区流量控制模型,二是对模型进行求解。
(1)子区流量控制模型如下所示:
其中,优化目标
(2)使用模拟退火算法求解上述模型,模型的决策变量为任意两个子区的边界调控流量,根据决策变量可以计算上述子区流量控制模型的各参数,并进而根据模拟退火算法求解得到最优子区流量控制方案。
本例中各子区的边界流量控制方案如表4所示。
表4使用模拟退火算法求解子区流量控制模型的结果
这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。说明书中所涉及的效果或优点等相关描述可因具体条件参数的不确定或其它因素影响而可能在实际实验例中不能体现,效果或优点等相关描述不用于对发明范围进行限制。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。
- 一种基于多级子区划分的路网可视化方法及装置
- 一种基于电警数据的路网子区划分方法